
╬’¾wį┌┐šķgŠ▀ėą┴∙éĆūįė╔Č╚Ż¼╝┤čžxĪóyĪóz╚²éĆų▒ĮŪū°ś╦▌SĘĮŽ“Ą─ęŲäėūįė╔Č╚║═└@▀@╚²éĆū°ś╦▌SĄ─▐Däėūįė╔Č╚ ĪŻę“┤╦Ż¼ę¬═Ļ╚½┤_Č©╬’¾wĄ─╬╗ų├Ż¼Š═▒žĒÜŪÕ│■▀@┴∙éĆūįė╔Č╚ĪŻ
┴∙ūįė╔Č╚ÖCąĄ▒█įŁ└Ē
╚╬║╬ę╗éĆø]ėą╩▄╝s╩°Ą─╬’¾wŻ¼į┌┐šķgŠ∙Š▀ėą6éƬÜ┴óĄ─▀\äėĪŻ
ęį╚ńłD╦∙╩ŠĄ─ķLĘĮą╬×ķ└²Ż¼╦³į┌ų▒ĮŪū°ś╦ŽĄoxyzųą┐╔ęįėą3éĆŲĮęŲ▀\äė║═3éĆ▐DäėĪŻ3éĆŲĮęŲ▀\äėĘųäe╩Ūčžx,y,z▌SĄ─ŲĮęŲ▀\äė,3éĆ▐DäėĘųäe╩Ū└@x,y,z▌SĄ─▐DäėĪŻ┴ĢæT╔Ž░č╔Ž╩÷6éƬÜ┴ó▀\äėĘQū÷6éĆūįė╔Č╚ĪŻ
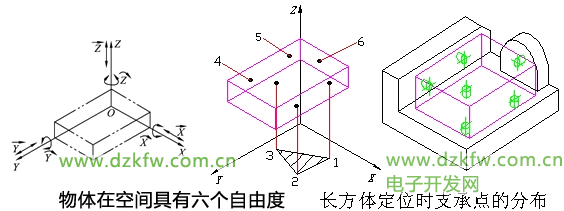
╚ń╣¹▓╔╚Īę╗Č©Ą─╝s╩°┤ļ╩®Ż¼Ž¹│²╬’¾wĄ─6éĆūįė╔Č╚Ż¼ät╬’¾w▒╗═Ļ╚½Č©╬╗ĪŻ╚ń╔ŽłD╦∙╩ŠŻ¼▓╔ė├6éĆ░┤ę╗Č©ęÄätįOų├Ą─ų¦ō╬³cŻ¼╝s╩°╬’¾w6éĆūįė╔Č╚Ą─įŁ└ĒĘQ×ķ┴∙³cČ©╬╗įŁ└ĒĪŻ
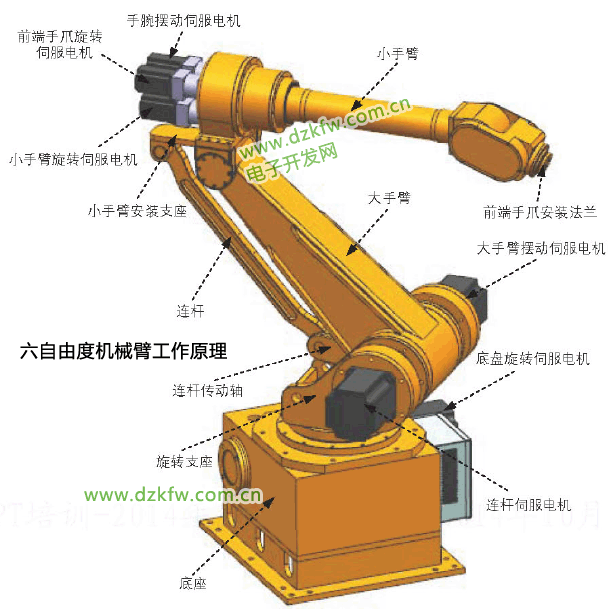
┴∙ūįė╔Č╚ÖCąĄ▒█╩Ūę╗ĘNČÓ╣”─▄Ą─ÖCąĄįOéõŻ¼╦³─▄ē“į┌ę╗éĆŲĮ├µ╔Ž▀Mąą┴∙éĆĘĮŽ“Ą─¬Ü┴ó▀\äėĪŻŠ▀¾wüĒšfŻ¼┴∙ūįė╔Č╚ÖCąĄ▒█┐╔ęįį┌ęįŽ┬ÄūéĆĘĮŽ“╔Ž▀\äėŻ║
- ╔ŽŽ┬▀\äėŻ©čžų°Z▌SŻ®Ż║ÖCąĄ▒█┐╔ęįÅ─Ąž├µ┤╣ų▒╠ßŲŻ¼ę▓┐╔ęįīóŲõĘ┼Ž┬ų┴Ąž├µĪŻ
- Ū░║¾▀\äėŻ©čžų°Y▌SŻ®Ż║ÖCąĄ▒█┐╔ęįį┌╦«ŲĮ├µā╚Ū░║¾ęŲäėĪŻ
- ū¾ėę▀\äėŻ©čžų°X▌SŻ®Ż║ÖCąĄ▒█┐╔ęįį┌╦«ŲĮ├µā╚ū¾ėęęŲäėĪŻ
- └@X▌Są²▐DŻ║ÖCąĄ▒█┐╔ęįį┌ūį╔Ē┐v▌S╔Ž▀Mąąą²▐DĪŻ
- └@Y▌Są²▐DŻ║ÖCąĄ▒█┐╔ęįį┌ūį╔ĒÖM▌S╔Ž▀Mąąą²▐DĪŻ
- └@Z▌Są²▐DŻ║ÖCąĄ▒█┐╔ęįį┌ūį╔ĒžQų▒▌S╔Ž▀Mąąą²▐DĪŻ
×ķ┴╦īŹ¼F▀@ą®▀\äėŻ¼┴∙ūįė╔Č╚ÖCąĄ▒█═©│Ż░³└©ČÓéƬÜ┴óĄ─ĻP╣ØŻ¼├┐éĆĻP╣ØČ╝ė╔ļŖÖC║═é„äėčbų├┐žųŲŻ¼─▄ē“Š½┤_Ąž┐žųŲ╦┘Č╚║═┴”┴┐ĪŻ┤╦═ŌŻ¼ÖCąĄ▒█Ą─┐žųŲĘĮ╩Įų„ę¬ėąķ_Łh┐žųŲ║═ķ]Łh┐žųŲā╔ĘNĪŻķ_Łh┐žųŲ╩Ū═©▀^ŅAįOĄ─▄ē█E║═╦┘Č╚üĒ▀Mąą┐žųŲĄ─Ż¼Č°ķ]Łh┐žųŲät╩Ū═©▀^é„ĖąŲ„½@╚ĪÖCąĄ▒█▀\äėĄ─ĀŅæBĘ┤üŻ¼╚╗║¾═©▀^┐žųŲŲ„▀Mąąėŗ╦Ń║═š{š¹Ż¼ęį▀_ĄĮŠ½┤_┐žųŲĄ──┐Ą─ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū