
╝ż╣Ō£yŠÓįOėŗ:┤¾ų┬┴„│╠Ż║
1Ż¼╗∙▒ŠįŁ└Ē║═ĻPµI:
╝ż╣Ō├}ø_£yŠÓ┼c└ū▀_£yŠÓį┌įŁ└Ē╔Ž╩Ū═Ļ╚½ŽÓ═¼Ą─ĪŻį┌£yŠÓ³c╝ż╣Ō░l╔õÖCŽ“▒╗£y─┐ś╦░l╔õ╝ż╣Ō├}ø_Ż¼╣Ō├}ø_┤®▀^┤¾ÜŌĄĮ▀_─┐ś╦Ż¼Ųõųąę╗ąĪ▓┐Ęų╝ż╣ŌĮø─┐ś╦Ę┤╔õ║¾ĘĄ╗ž£yŠÓ³cŻ¼▓ó▒╗£yŠÓÖC╔ŽĄ─╠Į£yŽĄĮyĮė╩šĪŻ£y│÷Å─╝ż╣Ō░l╔õĢr┐╠ĄĮĘ┤╔õ╣Ō▒╗Įė╩šĢr┐╠ų«ķgĄ─ĢrķgķgĖ¶tŻ¼Ė∙ō■ęčų¬╣Ō╦┘Ż¼╣½╩ĮŻ║S=Ct/2(SŠÓļxŻ╗C╝ż╣Ō┐šÜŌųą╦┘Č╚Ż╗t░l╔õ║═Įė╩š╗ž▓©Ą─Ģrķg▓ŅĪŻ
╝ż╣Ō£yŠÓĘĮ░Ė║═ĻPµI▓┐╝■ŽĄĮyŻ║
░ļī¦¾w╝ż╣ŌŲ„Ż║─┐Ū░╔╠ŲĘ╗»Ą─░ļī¦¾w╝ż╣ŌŲ„▓©ķLĘČć·Äū║§║Ł╔w┴╦Å─ūŽ═ŌĄĮ▀h╝t═ŌŻ©0.325~34”╠mŻ®Ą─╣ŌūVģ^ė“Ż¼ŪęŠ▀ėą¾wĘeąĪĪóųž┴┐▌pĪóęūė┌┼cŲõ╦³Ų„╝■╝»│╔Ą╚ā׳cĪŻ
╣Ōą┼╠¢Įė╩šŽĄĮyŻ║╝ż╣Ō£yŠÓāxĄ─Įė╩šŽĄĮy╩ūŽ╚īó╣Ōą┼╠¢▐D╗»×ķļŖą┼╠¢Ż¼ų«║¾į┘▀MąąĘ┼┤¾ĪóĘų╬÷║═ėŗ╦ŃĪŻ
Ė▀Š½Č╚Ģrķg£y┴┐Ż║▓╔ė├├}ø_ĘĮ╩Į▀Mąą╝ż╣Ō£yŠÓŻ¼ŠÓļxĄ─½@Ą├╩Ū═©▀^£y┴┐╝ż╣Ōė╔░l╔õČ╦ĄĮ─┐ś╦Č╦üĒ╗ž═∙ĘĄ╦∙ąĶĄ─ĢrķgüĒīŹ¼FĄ─ĪŻ
2.├}ø_╝ż╣Ō£yŠÓÖCė▓╝■įOėŗ╝░▀xą═Ż║
ė▓╝■š¹¾w╠Ä└Ē┴„│╠Ż║

ą┼╠¢Ę┼┤¾ļŖ┬Ę▓┐ĘųŻ║
Š▀¾w▀xą═╚ńŽ┬
Ż©1Ż®╝ż╣ŌŲ„╝░╠Į£yŲ„
AĪó╝ż╣ŌŲ„
ą═╠¢Ż║905D1SJ03UAŻ©Ą┬ć°LASER COMPONENTSŻ®
ĘÕųĄ╣”┬╩Ż║25W
ķōųĄļŖ┴„Ż║300mA
BĪó╠Į£yŲ„
ą═╠¢Ż║AD500-9Ż©SILICON SENSORŻ®
░ĄļŖ┴„Ż║5nA
įļ┬ĢļŖ┴„Ż║1pA/Hz
Ż©2Ż®┐žųŲMCUŻ║MCU▀xō±ST╣½╦ŠĄ─STM32F103C8T6ąŠŲ¼Ż¼įōMCUų„ŅlūŅĖ▀72MHzŻ¼╝»│╔ėąUARTĪóCANĪóSPIĮė┐┌ęį╝░16bitČ©ĢrŲ„Ż¼ė▓╝■┘Yį┤╝░▀\╦Ń╦┘Č╚═Ļ╚½ØMūŃ£yŠÓæ¬ė├ĪŻ
Ż©3Ż®├}ø_½@╚ĪŻ║
▀xō±TIĄ─LM555CMČ©ĢrŲ„═©▀^═ŌĮėRCŠWĮj½@Ą├1KhzĄ─ĘĮ▓©ą┼╠¢Ż¼║¾═©▀^RCĘeĘųļŖ┬Ęęį╝░╗“ĘŪķT║¾½@Ą├200nsĄ─├}ø_ą┼╠¢ĪŻ
═©▀^š{╣ØR1ĪóR2ĪóC1Ą─ųĄüĒš{╣Ø555Č©ĢrŲ„Ą─▌ö│÷ĘĮ▓©Ą─Ņl┬╩Ż¼š{╣ØR3ĪóC3Ą─ųĄüĒš{╣ØOUTČ╦▌ö│÷Ą─├}ø_īÆČ╚ĪŻ
Ż©4Ż®├}ø_“īäėļŖ┬Ę
▀xō±RLCš±╩ÄļŖ┬Ęū„×ķ╝ż╣ŌČ■śO╣▄Ą─“īäėļŖ┬ĘŻ¼═©▀^ķ_ĻPŲ„╝■┐žųŲā”─▄ßīĘ┼ļŖ─▄ĪŻ
ļŖ┬ĘųąR5ĪóL1ĪóC5ĪóL2ĪóR6ĪóD2ĮM│╔│õļŖļŖ┬ĘŻ¼C5ū„×ķā”─▄ļŖ╚▌Ż¼C6ū„×ķčaāöļŖ╚▌ĪŻQ1ĪóC5ĪóL2ĪóR6ĪóLDĮM│╔Ę┼ļŖĄ─RLCš±╩ÄļŖ┬ĘĪŻ×ķ╩╣ļŖ┬Ę½@Ą├─ŪéĆ▌^║├Ą─ļŖ┴„Ū·ŠĆŻ¼RLCš±╩ÄļŖ┬Ę╣żū„į┌ŪĘūĶ─ßĀŅæBŻ¼▒M┴┐▒ŻūC─▄┴┐╝»ųąį┌š±╩ÄĄ─Ą┌ę╗éĆĘÕųĄģ^ė“ĪŻ
▀xō±VISHAY╣½╦ŠĄ─SI2302ADS,MOSTET-Nū„×ķķ_ĻPęį╝░“īäėŲ„╝■Ż¼Ųõī¦═©Ģrķg×ķ55nsŻ¼ī¦═©╦┘Č╚┐ņ┐╔ū„×ķĖ▀╦┘ķ_ĻPęį╝░“īäėŲ„ĪŻė╔ė┌Ū░╝ē├}ø_▌ö│÷Ą─“īäė─▄▌^ąĪŻ¼▀xō±MIC4425ū„×ķMOS╣▄Ą─“īäėŲ„ĪŻ
Ż©5Ż®APDŪ░ų├Ę┼┤¾ļŖ┬Ę
APD▌ö│÷×ķļŖ┴„ą┼╠¢Ż¼×ķųvļŖ┴„ą┼╠¢▐DōQ×ķļŖē║▓óĘ┼┤¾Ż¼╩╣ė├ā╔╝ēĘ┼┤¾ļŖ┬ĘŻ¼Ą┌ę╗╝ē┐ńūĶĘ┼┤¾Ż¼Ą┌Č■╝ē═¼Ž“▒╚└²Ę┼┤¾ļŖ┬ĘĪŻ
═©▀^š{╣ØR9Ą─ųĄš{š¹┐ńūĶĘ┼┤¾Ą─▒ČöĄŻ¼š{š¹R10║═R8Ą─▒╚ųĄš{š¹═¼ŽÓ▒╚└²Ę┼┤¾ļŖ┬ĘĄ─▌ö│÷ĪŻ
▌ö│÷ą┼╠¢Ą─Ę∙Č╚┐╝æ]═©▀^ūįäėį÷ęµ┐žųŲļŖ┬Ę┐žųŲŻ¼╗“š▀═©▀^ļŖē║Ė·ļSŲ„ū„Ę∙Č╚▀MąąŽ▐ųŲĪŻį┌▌ö│÷Č╦┐╝æ]╩╣ė├ėąį┤×V▓©Ų„ī”ą┼╠¢▀Mąą×V▓©▓óį┘┤╬Ę┼┤¾Ż¼▀\Ę┼╩╣ė├AD8007ĪŻ
APDĄ─Ų½ų├ļŖē║Ģ║▀xMAX5028ĪŻ
▀xė├TIĄ─OPA657▀\Ę┼ū„ą┼╠¢Ę┼┤¾Ż¼įō▀\Ę┼ĦīÆ1.6GŻ¼ē║ö[┬╩700V/usĪŻ
Ż©6Ż®├}ø_š¹ą╬ļŖ┬Ę
īó×V▓©Ę┼┤¾║¾Ą─╗ž▓©├}ø_ą┼╠¢Ż¼▐D▐D×ķTTL▌ö│÷ĪŻ
▀xė├├└ą┼╣½╦ŠĄ─MAX913CSAąŠŲ¼Ż¼śŗ│╔▀t£■▒╚▌^Ų„Ż¼į÷ÅŖ┐╣įļ┬Ģ─▄┴”ĪŻļŖ┬ĘųąĖ─ūāR3ĪóR4Ą─ųĄ┐╔Ė─ūā▒╚▌^ķōųĄŻ¼Ė─ūāR4ĪóR5Ą─ųĄš{╣ØļŖ┬ĘĄ─š²Ę┤üę▓┐╔ų▒Įė╩╣ė├LM555śŗ│╔╩®├▄╠žė|░lŲ„ū„├}ø_š¹ą╬ļŖ┬ĘĪŻ
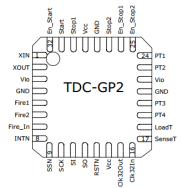
Ż©7Ż®Ģrķg£y┴┐ļŖ┬Ę
Ģrķg£y┴┐▀xō±ACAM╣½╦ŠĄ─TDC-GP2ĪŻįōąŠŲ¼Ą─Ģrķg£y┴┐░³║¼ā╔éĆĘČć·Ż¼▒ŠįOėŗųą╩╣ė├0~1.8us▀@éĆĘČć·Ż¼┤╦£y┴┐ĘČć·ā╚Ą─Ąõą═Ęų▒µ┬╩┐╔▀_50ps rmsĪŻąŠŲ¼ī”═ŌĮė┐┌×ķSPIĮė┐┌Ż¼▒Ńė┌MCUūxīæöĄō■ĪŻ
Ż©8Ż®ļŖ┬Ę░ÕĮYśŗ
╝ż╣ŌŲ„“īäėļŖ┬Ę┼c╝ż╣ŌŲ„ę╗Ųśŗ│╔░l╔õ░ÕŻ¼Ū░ų├Ę┼┤¾ļŖ┬Ę┼c║¾╝ēĘ┼┤¾Ų„╝░╠Į£yŲ„ę╗Ųū÷│╔Įė╩š░ÕŻ¼├}ø_╔·│╔Īó├}ø_š¹ą╬ĪóĢrķgėŗöĄĪóMCUę╗Ųśŗ│╔ų„┐ž░ÕĪŻĖ„░Õų«ķg═©▀^▀BĮėŲ„╩╣ė├Ų┴▒╬ŠĆ▀BĮėĪŻ
ŅAėŗĖ„░Õ│▀┤ńŻ║
░l╔õ░ÕŻ║ĘĮą╬25*25mm(łAą╬ ų▒ÅĮ25mm)
Įė╩š░ÕŻ║ĘĮą╬35*35mm(łAą╬ ų▒ÅĮ40mm)
ų„┐ž░ÕŻ║ĘĮą╬45*95mm
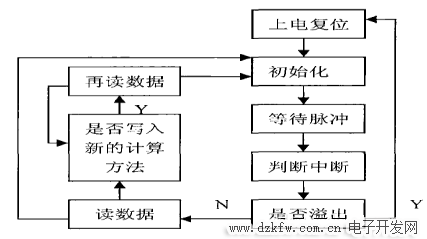
3.▄ø╝■įOėŗ╝░Ųõ┴„│╠łDŻ║
Ż©1Ż®╩ūŽ╚ī”ąŠŲ¼╝─┤µŲ„▀Mąą┼õų├Ż¼│§╩╝╗»ąŠŲ¼║¾Ż¼Ą╚┤²£y┴┐Ż¼╚╗║¾═Ļ│╔╗“š▀£y┴┐ęń│÷║¾å╬Ų¼ÖCČ╝Ģ■Ž“ąŠŲ¼ūx╚Īę╗ĮM£y┴┐öĄō■▀Mąą╠Ä└ĒŻ¼ūŅ║¾Ą╚┤²Ž┬ę╗┤╬£y┴┐ĪŻ£y┴┐┴„│╠łD╚ńłD╦∙╩ŠŻ║
Ż©2Ż®ąŻ£╩▀xō±Ż¼ė╔ė┌£y┴┐Ą─Ęų▒µ┬╩░╔Ģ■ļSų°£žČ╚║═ļŖē║Ą─Ė─ūāČ°Ė─ūāŻ¼╦∙ęįTDC-GP2Ą─ALUąĶę¬ā╚▓┐ąŻ£╩£y┴┐ĮY╣¹ĪŻ═©▀^įOų├╝─┤µŲ„Ą─bit5×ķüĒ▀xō±ś╦£╩£y┴┐ĪŻ×ķ┴╦▀MąąąŻ£╩Ż¼TDC£y┴┐1éĆ╗“2éĆģó┐╝ĢrńŖų▄Ų┌REFCLK,▀@ā╔éĆöĄō■ĪŻ
Ż©3Ż®Ģrķg£y┴┐Ą─ĘĮĘ©
AŻ¼TDC-GP2ā╚▓┐ĮYśŗŻ║ų„ę¬ė╔├}ø_░l╔·Ų„Ż¼ĢrķgöĄūų▐DōQŲ„Ż¼öĄō■╠Ä└Ēå╬į¬Ż¼£žČ╚£y┴┐▓┐ĘųŻ¼╩Ūį┌┐žųŲå╬į¬Ż¼╝─┤µŲ„║═SPIĮė┐┌ĮM│╔ĪŻTDC-GP2Ą─IO┐█ļŖē║║═║╦ą─ļŖē║Ęųäe×ķ1.8-5.5V║═1.8-3.6VĪŻā╚▓┐ėąā╔éĆ╦ŃöĄ▀ē▌ŗå╬į¬ALU1,ALU2ĪŻ
BŻ¼Ģrķg£y┴┐Ą─┴„│╠
ė╔MCUī”GP2▀Mąą╔ŽļŖÅ═╬╗Ż¼īæ╚ļŽÓæ¬öĄō■▀MąąŽÓæ¬┼õų├ĪŻGP2į┌│§╩╝╗»│╔╣”║¾Ą╔┤¾START║═STOP1,STOP2Ą─├}ø_▌ö╚ļŻ¼═¼Ģr▌ö│÷ųąöÓĪŻMCUūx╚ĪĀŅæB╝─┤µŲ„┼ąöÓėŗöĄŲ„╩Ūʱ│¼ęń│÷Ż¼╚¶ęń│÷Ż¼ätī”GP2į┘ę╗┤╬Å═╬╗╗“š▀═Żų╣ł╠ąą│╠ą“Ż¼╚¶¤oęń│÷Ż¼ätīæ╚ļūx╚ĪöĄō■ųĖ┴Ņ▓óÅ─öĄō■╝─┤µŲ„ųąūx╚ĪöĄō■ĪŻ╚¶ę¬īæ╚ļą┬Ą─ėŗ╦ŃĘĮĘ©Š═įOų├ųąöÓūx╚ĪöĄō■ĪŻ
Ż©4Ż®öĄō■š`▓Ņ▄ø╝■Ęų╬÷║═ą▐š²
AŻ¼Ģrķg£y┴┐š`▓Ņ
╩╣ė├ŽĄĮy╩╣ė├TDC-GP2Ą─£y┴┐ĘČć·1Ż¼Ė∙ō■šō╬─į┌┤╦ĘČć·│ķ╚Īę╗ą®ģó┐╝³c▀Mąąā╔░┘┤╬Ū¾ŲĮŠ∙Ż¼Ģ■░l¼Fš`▓ŅĘĆČ©į┌-1nsū¾ėęŻ¼▀@╩Ūė╔ė┌ļŖį┤▓©╝y║═CPLDĄ─IOē║ö[Ņl┬╩▓╗ūŃįņ│╔Ą─Ż¼Ģrķg£y┴┐Ą─ś╦£╩╩╝ĮK▒Ż│ųį┌0.1nsęįā╚Ż¼╩╣ė├╚ńŽ┬╣½╩Į▀MąąöĄō■ą▐š²Ż¼š`▓Ņ┐žųŲį┌0.2nsū¾ėę
ą▐š²öĄō■ųĄ=0.99983*£y┴┐ŲĮŠ∙ųĄ+0.88342
BŻ¼ę²ŲĢrķg£y┴┐š`▓ŅĄ─Ųõ╦³ę“╦ž
£žČ╚║═ļŖį┤▓©╝yŽĄöĄįĮĖ▀Ż¼£y┴┐š`▓ŅįĮ┤¾ĪŻę“┤╦į┌įOėŗĢr║“┐╝æ]╣żū„£žČ╚║═ļŖį┤╚ź±ŅĪŻ
ą┼╠¢į┤ČČäėŻ║TDC-GP2╩Ūęį┼ąäe╔Ž╔²čž╗“Ž┬ĮĄčžüĒū„×ķėŗĢrĄ─ķ_╩╝╗“ĮY╩°Ż¼╦∙ęįą┼╠¢į┤Ą─ē║ö[┬╩ĪŻ
PCBū▀ŠĆ║═┤«ö_ą¦æ¬ĪŻ╚ń╣¹▌ö╚ļą┼╠¢┼cŲõ╦¹ą┼╠¢ŠĆ▀^ė┌┐┐Į³Ż¼ą┼╠¢ŠĆ╔ŽĢ■«a╔·Ėąæ¬ļŖ┴„ī¦ų┬╝ŌĘÕ├}ø_.
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū