
ę╗Īó▒╚▌^ųĖ┴Ņ
1Ż®▒╚▌^ųĖ┴ŅŻ©CMPŻ®
▒╚▌^į┤▓┘ū„öĄ(sh©┤)[S1Īż]║═[S2Īż]Ą─ųĄŻ¼▓óīó▒╚▌^Ą─ĮY(ji©”)╣¹╦═ĄĮ─┐ś╦(bi©Īo)▓┘ū„öĄ(sh©┤)[DĪż]ĪŻ
Ž┬łDųą«ö(d©Īng)X0×ķONĢrīó[S1Īż]K100║═[S2Īż]C20▀Mąą▒╚▌^Ż¼▓óīóĮY(ji©”)╣¹Ęųäe▒Ż┤µĄĮM0ĪóM1ĪóM2ųąĪŻ
«ö(d©Īng)[S1Īż]100>[S2Īż]C20«ö(d©Īng)Ū░ųĄĢrŻ¼M0×ķONŻ╗«ö(d©Īng)[S1Īż]100=[S2Īż]C20«ö(d©Īng)Ū░ųĄĢrŻ¼M1×ķONŻ╗«ö(d©Īng)[S1Īż]100<[S2Īż]C20«ö(d©Īng)Ū░ųĄĢrŻ¼M2×ķONĪŻ

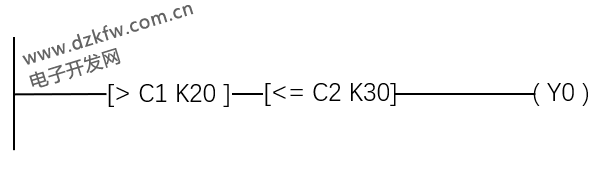
2Ż®ė|³c▒╚▌^ųĖ┴Ņ
ī”ā╔éĆöĄ(sh©┤)ųĄ▀Mąą▒╚▌^Ż¼Śl╝■│╔┴óĢr▌ö│÷×ķONĪŻ▒╚▌^ĘĮ╩Į×ķŻ║/=/>=/<=/<>(▓╗Ą╚ė┌)ĪŻ
Ž┬łD▒Ē╩Š«ö(d©Īng)C1«ö(d©Īng)Ū░ųĄ>20ŪęC2«ö(d©Īng)Ū░ųĄ<=30ĢrŻ¼Y0×ķONĪŻ
Č■Īó╦─ät▀\╦ŃųĖ┴Ņ
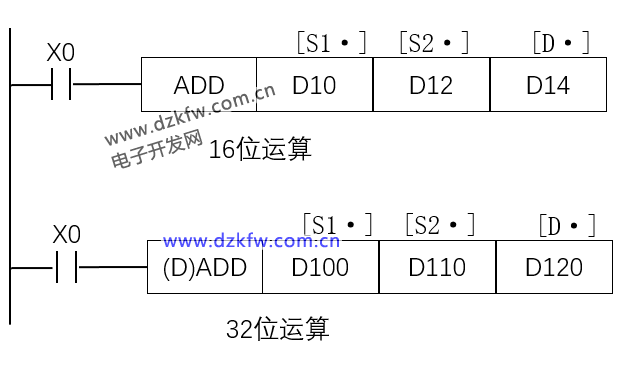
1Ż®╝ė▀\╦ŃŻ©ADD Ż®
īóį┤▓┘ū„öĄ(sh©┤)[S1Īż]║═[S2Īż]ŽÓ╝ėŻ¼▓óīóĮY(ji©”)╣¹▒Ż┤µĄĮ─┐ś╦(bi©Īo)▓┘ū„öĄ(sh©┤)[DĪż]ĪŻį┌▀Mąą32╬╗▀\╦ŃĢrųĖČ©Ą─▓┘ū„öĄ(sh©┤)×ķĄ═╬╗Ż¼╚ńłDųą│╠ą“ät▒Ē╩ŠŻ©D101,D100Ż®+Ż©D11Ż¼D110Ż®Ī·Ż©D121Ż¼D120Ż®ĪŻ
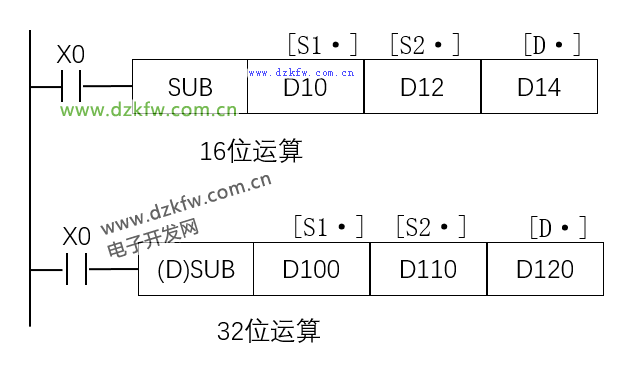
2)£p▀\╦ŃŻ©SUBŻ®
ė├į┤▓┘ū„öĄ(sh©┤)[S1Īż]£p╚ź[S2Īż]Ż¼▓óīóĮY(ji©”)╣¹▒Ż┤µĄĮ─┐ś╦(bi©Īo)▓┘ū„öĄ(sh©┤)[DĪż]ĪŻ32╬╗▀\╦ŃĄ─ĘĮ╩Į┼c╝ė▀\╦ŃŽÓ═¼ĪŻ
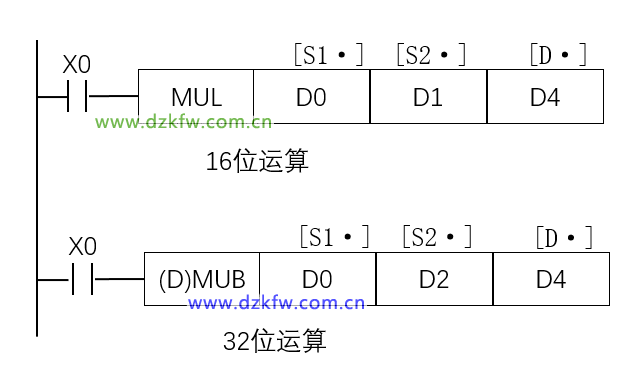
3Ż®│╦▀\╦ŃŻ©MULŻ®
īóį┤▓┘ū„öĄ(sh©┤)[S1Īż]║═[S2Īż]ŽÓ│╦Ż¼▓óīóĮY(ji©”)╣¹▒Ż┤µĄĮ─┐ś╦(bi©Īo)▓┘ū„öĄ(sh©┤)[DĪż]ĪŻ
į┌▀Mąą16╬╗▀\╦ŃĢr─┐ś╦(bi©Īo)▓┘ū„öĄ(sh©┤)×ķ32╬╗Ż¼╝┤Ż©D0Ż®Ī┴Ż©D1Ż®Ī·Ż©D5Ż¼D4Ż®ĪŻ
į┌▀Mąą32╬╗▀\╦ŃĢr─┐ś╦(bi©Īo)▓┘ū„öĄ(sh©┤)×ķ64╬╗Ż¼╝┤Ż©D1Ż¼D0Ż®Ī┴Ż©D3Ż¼D2Ż®Ī·Ż©D7Ż¼D6Ż╗D5Ż¼D4Ż®ĪŻ
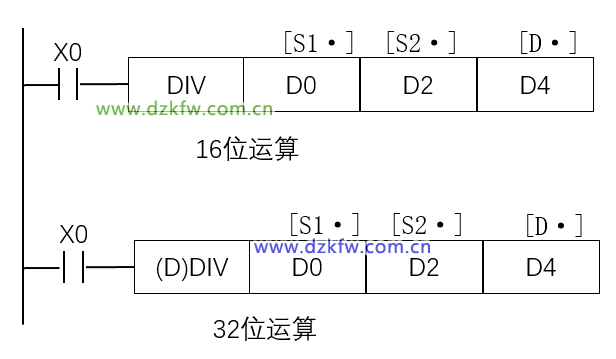
4Ż®│²▀\╦ŃŻ©DIVŻ®
▒╗│²öĄ(sh©┤)[S1Īż]│²ęį│²öĄ(sh©┤)[S2Īż]Ż¼▓óīóĮY(ji©”)╣¹▒Ż┤µĄĮ─┐ś╦(bi©Īo)▓┘ū„öĄ(sh©┤)[DĪż]Ż¼ėÓöĄ(sh©┤)▒Ż┤µĄĮ[DĪż]Ą─Ž┬ę╗éĆį¬╝■ĪŻ
į┌▀Mąą16╬╗▀\╦ŃĢr▒╗│²öĄ(sh©┤)×ķŻ©D0Ż®Ż¼│²öĄ(sh©┤)×ķŻ©D2Ż®Ż¼╔╠×ķŻ©D4Ż®Ż¼ėÓöĄ(sh©┤)×ķŻ©D5Ż®ĪŻ
į┌▀Mąą32╬╗▀\╦ŃĢr▒╗│²öĄ(sh©┤)×ķŻ©D1Ż¼D0Ż®Ż¼│²öĄ(sh©┤)×ķŻ©D3Ż¼D2Ż®╔╠×ķŻ©D5Ż¼D4Ż®ėÓöĄ(sh©┤)×ķŻ©D7Ż¼D6Ż®ĪŻ
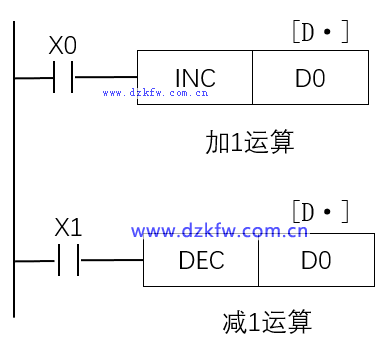
5Ż®╝ė1║═£p1ųĖ┴Ņ
╩╣ė├├}ø_ł╠(zh©¬)ąąĢrŻ¼├┐Öz£yĄĮł╠(zh©¬)ąąŚl╝■Ą─╔Ž╔²čž[DĪż]Ģ■ūįäė╝ė1/£p1ĪŻ
╩╣ė├▀B└m(x©┤)ł╠(zh©¬)ąąĢrŻ¼ät├┐éĆÆ▀├Ķų▄Ų┌╝ė1/£p1ĪŻ
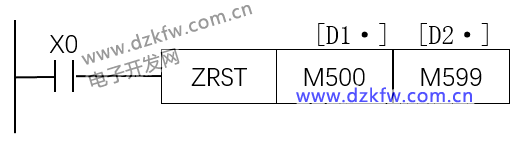
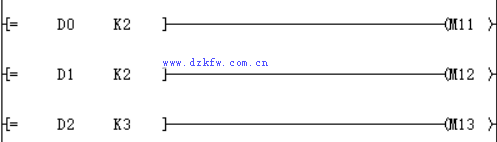
╚²Īóģ^(q©▒)ķgÅ═(f©┤)╬╗ųĖ┴ŅŻ©ZRSTŻ®
īó[D1Īż]║═[D2Īż]ųĖČ©ĘČć·ā╚(n©©i)Ą─į¬╝■│╔┼·Å═(f©┤)╬╗ĪŻ
[D1Īż]║═[D2Īż]æ¬(y©®ng)×ķ═¼ŅÉą═į¬╝■Ż¼[D1Īż]ųĖČ©Ą─į¬╝■╠¢æ¬(y©®ng)ąĪė┌Ą╚ė┌[D2Īż]ųĖČ©Ą─į¬╝■╠¢ĪŻ
Ž┬łD│╠ą“▒Ē╩ŠīóM500Ī½M599│╔┼·Å═(f©┤)╬╗ĪŻ
╦─ĪóųĖ┴Ņ▀\ė├
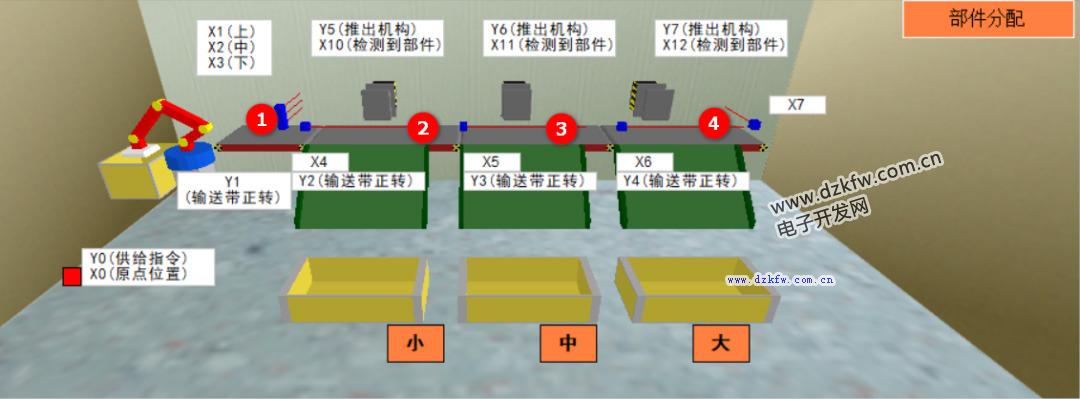
ęįĪČ▓┐╝■Ęų┼õĪĘĒŚ─┐×ķ└²ī”╔Ž╩÷ųĖ┴Ņ▀Mąąč▌╩ŠĪŻ
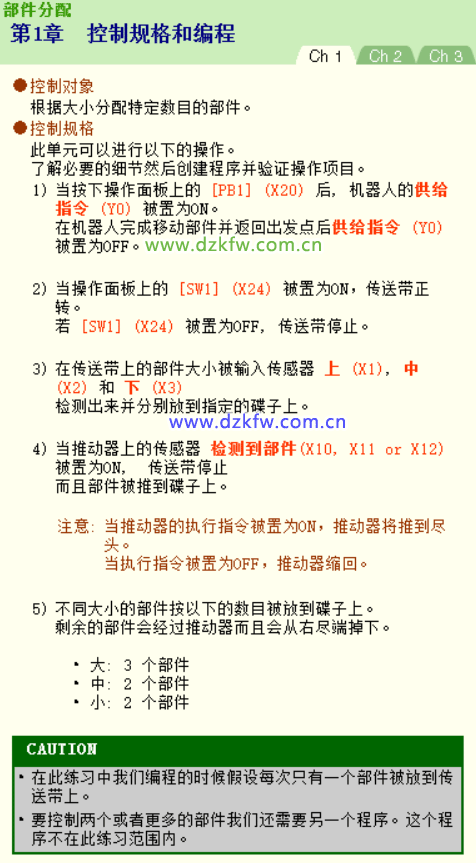
1Ż®┤_Č©ūā┴┐▒Ē
▀M╚ļĒŚ─┐║¾Ż¼Ė∙ō■(j©┤)ĒŚ─┐ę¬Ū¾║═Ę┬šµäė«ŗ┤_Č©Ė„éĆį¬╝■╦∙ī”æ¬(y©®ng)Ą─I/OĄžųĘĪŻ
|ĒŚ─┐ę¬Ū¾
Ę┬šµäė«ŗ

2Ż®ŠÄ▌ŗ│╠ą“
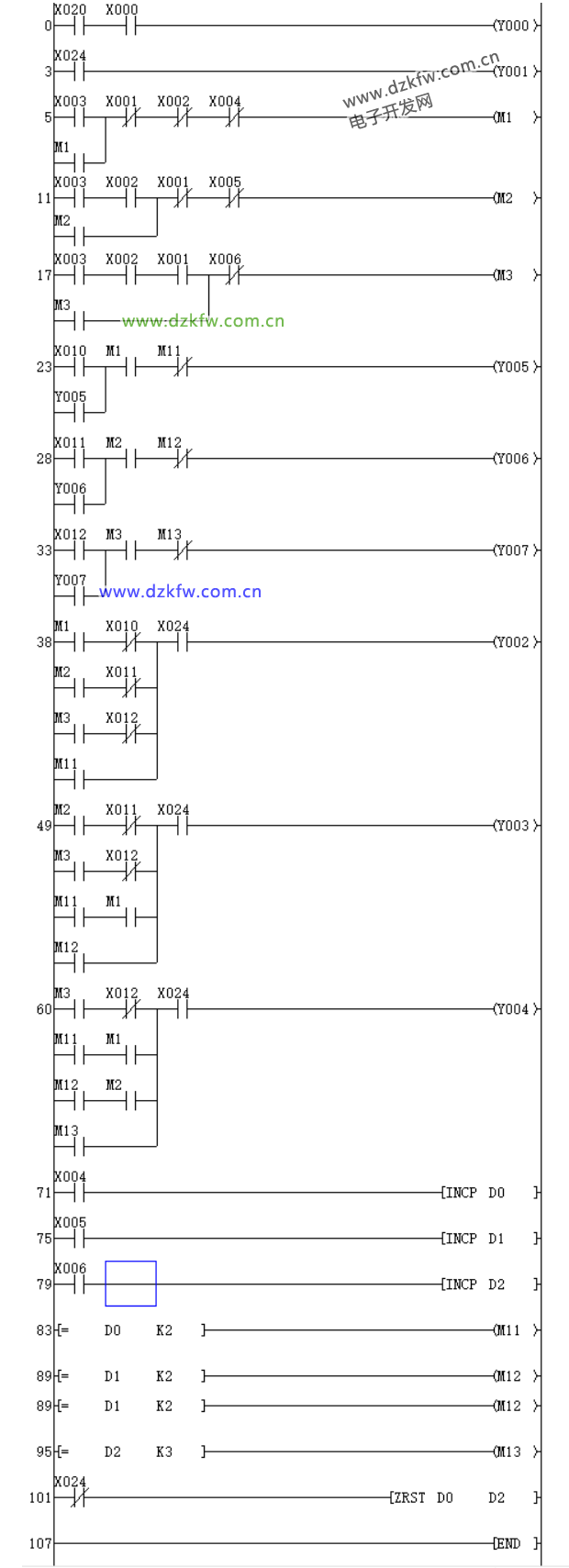
│╠ą“Č╬1Ż║╬’╝■╣®Įo░┤Ž┬░┤ŌoPB1ŪęÖCŲ„╚╦į┌įŁ³cŻ¼ÖCŲ„╚╦╣®Įo╬’╝■ĪŻ

│╠ą“Č╬2Ż║1╠¢é„╦═Ħš²▐D(zhu©Żn)ą²▐D(zhu©Żn)ą²ŌoSW1Ż¼1╠¢é„╦═Ħäėū„ĪŻ

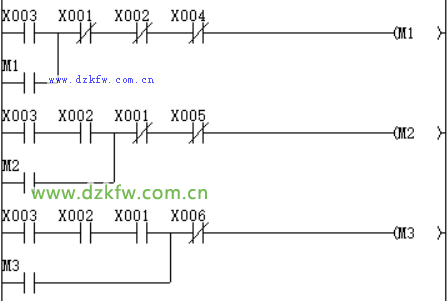
|│╠ą“Č╬3Ż║╬’╝■ą═╠¢Öz£y«ö(d©Īng)X3×ķONŪęX2ĪóX1×ķOFFĢrŻ¼▒Ē╩Š╬’╝■╩ŪąĪą═╠¢Ż¼ūī▌oų·└^ļŖŲ„M1×ķON▓óūįµiĪŻ«ö(d©Īng)X4Öz£yĄĮ╬’╝■Ę┼ų├ĄĮ╬╗║¾Å═(f©┤)╬╗M1ĪŻųąą═╠¢┼c┤¾ą═╠¢╬’╝■Ą─Öz£yįŁ└Ē┼cŲõŅÉ╦ŲĪŻ
│╠ą“Č╬4Ż║═Ų│÷ÖCśŗ(g©░u)äėū„┐žųŲ╬’╝■ĄĮ╬╗Öz£yé„ĖąŲ„X10Ī½X12Öz£yĄĮ╬’╝■ĄĮ▀_ųĖČ©╬╗ų├║¾Ż¼ī”æ¬(y©®ng)Ą─═Ų│÷ÖCśŗ(g©░u)äėū„ĪŻ«ö(d©Īng)╬’╝■ĄĮ▀_ųĖČ©öĄ(sh©┤)┴┐║¾Ż¼═Ų│÷ÖCśŗ(g©░u)▓╗į┘äėū„ĪŻ
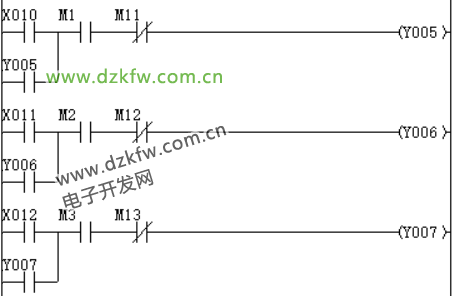
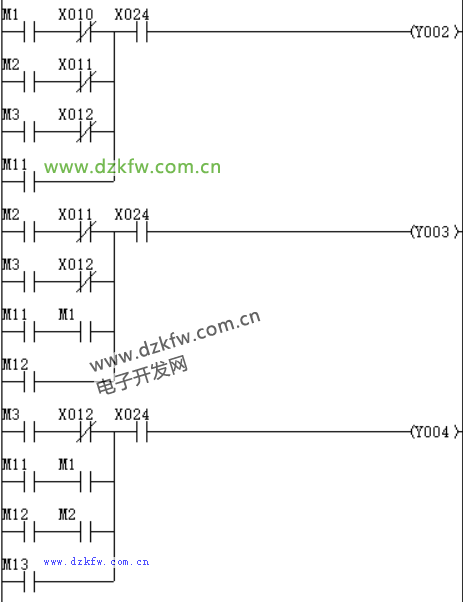
│╠ą“Č╬5Ż║2Ī½4╠¢▌ö╦═Ħäėū„┐žųŲ«ö(d©Īng)ī”æ¬(y©®ng)ą═╠¢Ą─╬’╝■ø]ėą▀_ĄĮųĖČ©öĄ(sh©┤)┴┐Ż¼Ūę╬’╝■ĄĮ╬╗Öz£yé„ĖąŲ„X10Ī½X12ø]ėąÖz£yĄĮ╬’╝■Ż¼ī”æ¬(y©®ng)Ą─▌ö╦═Ħäėū„ĪŻ«ö(d©Īng)ī”æ¬(y©®ng)ą═╠¢Ą─╬’╝■▀_ĄĮųĖČ©öĄ(sh©┤)┴┐║¾Ż¼¤ošō╬’╝■ĄĮ╬╗Öz£yé„ĖąŲ„X10Ī½X12╩ŪʱÖz£yĄĮ╬’╝■Ż¼╦∙ėą▌ö╦═ĦČ╝ę¬äėū„Ż¼īó╬’┴Ž═ŲĄĮĄžŽ┬ĪŻą²ŌoSW1×ķOFF║¾╦∙ėą▌ö╦═Ħ═Żų╣äėū„ĪŻ
│╠ą“Č╬6Ż║╬’╝■ėŗöĄ(sh©┤)├┐Öz£yĄĮ╬’╝■Ę┼ų├Öz£yé„ĖąŲ„X4Ī½X6Ą─╔Ž╔²čžŻ¼ī”æ¬(y©®ng)╝─┤µŲ„Š═▀Mąą╝ė1ĪŻ╝ė1ųĖ┴Ņ▌ö╚ļĘĮ╩ĮŻ║INCŻ©┐šĖ±Ż®D1ĪŻ

│╠ą“Č╬7Ż║▒╚▌^╬’╝■öĄ(sh©┤)┴┐«ö(d©Īng)╬’╝■╬┤▀_ĄĮųĖČ©öĄ(sh©┤)┴┐ĢrŻ¼╬’╝■š²│Ż▌ö╦═┼cĘ┼ų├Ż╗«ö(d©Īng)╬’╝■ĄĮ▀_ųĖČ©öĄ(sh©┤)┴┐║¾Ż¼═Ų│÷ÖCśŗ(g©░u)▓╗äėū„Ż¼ų▒Įėīóįō╬’╝■▌ö╦═ĄĮĄž╔ŽĪŻ▒╚▌^ųĖ┴Ņ▌ö╚ļĘĮĘ©Ż║=Ż©┐šĖ±Ż®D1Ż©┐šĖ±Ż®K2ĪŻ
│╠ą“Č╬8Ż║Å═(f©┤)╬╗╝─┤µŲ„╦∙ėąäėū„═Ļ│╔║¾īóą²ŌoSW1ą²▐D(zhu©Żn)ĄĮOFFŻ¼▓ó└¹ė├ģ^(q©▒)ķgÅ═(f©┤)╬╗ųĖ┴Ņī”╝─┤µŲ„▀MąąÅ═(f©┤)╬╗Ż¼Ą╚┤²ķ_╩╝Ž┬ę╗┤╬裣h(hu©ón)ĪŻ

│╠ą“š¹¾w×gė[
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū