
įōąĪųŲū„╦∙ąĶꬥ─į¬╝■║▄╔┘Ż║?ji©Żn)╬Ų¼ÖC(j©®)TA89C2051ę╗ų╗Ż¼RS232Įė┐┌ļŖŲĮ┼cTTLļŖŲĮ▐D(zhu©Żn)ōQą─Ų¼MAX232CPE ę╗ų╗Ż¼╝t═ŌĮė╩š╣▄ę╗ų╗Ż¼Š¦š±11.0592MHz,ļŖĮŌļŖ╚▌10uF4ų╗Ż¼10uFę╗ų╗Ż¼ļŖūĶ1K1éĆ(g©©)Ż¼300ÜW─Ęū¾ėę1éĆ(g©©)Ż¼┤╔Ų¼ļŖ╚▌30P2éĆ(g©©)ĪŻ░l(f©Ī)╣ŌČ■śO╣▄8éĆ(g©©)ĪŻār(ji©ż)ÕX▓╗ūŃ20į¬ĪŻ
ļŖ┬ĘįŁ└ĒŻ║
ų„┐žųŲå╬į¬╩Ūå╬Ų¼ÖC(j©®)AT89C2051,ųąöÓ┐┌INT0Ė·╝t═ŌĮė╩▄╣▄U1ŽÓ▀BŻ¼Įė╩š╝t═Ōą┼╠¢(h©żo)Ą─├}ø_Ż¼8éĆ(g©©)░l(f©Ī)╣ŌČ■śO╣▄ū„×ķ’@╩ŠĮŌ┤a▌ö│÷Ż©ę▓┐╔ęįė├üĒ(l©ói)öU(ku©░)š╣ĮėŲõ╦¹┐žųŲļŖ┬ĘŻ®Ż¼U3╩ŪĖ·ļŖ─X┤«ąą┐┌RS232ŽÓ▀BĢr(sh©¬)Ą─ļŖŲĮ▐D(zhu©Żn)ōQą─Ų¼Ż¼9Īó10─_Ęųäe┼cå╬Ų¼ÖC(j©®)Ą─1Īó2─_ŽÓ▀BŻ¼Ż©1─_×ķ┤«ąąĮė╩šŻ¼2─_×ķ┤«ąą░l(f©Ī)╦═Ż®Ż¼MAX232CPEĄ─7Īó8─_ĘųäeĮėļŖ─X┤«ąą┐┌Ą─2Ż©Įė╩šŻ®─_Īó3Ż©░l(f©Ī)╦═─_Ż®ĪŻŠ¦š±▓╔ė├11.0592MHzŻ¼▀@śė▓┼─▄╩╣Ą├═©ėŹĄ─▓©╠ž┬╩▀_(d©ó)ĄĮ9600b/sŻ¼ļŖ─Xę╗░Ń─¼šJ(r©©n)ųĄ╩Ū9600b/sĪó8╬╗öĄ(sh©┤)ō■(j©┤)╬╗Īó1╬╗═Żų╣╬╗Īó¤o(w©▓)ąŻ“×(y©żn)╬╗ĪŻ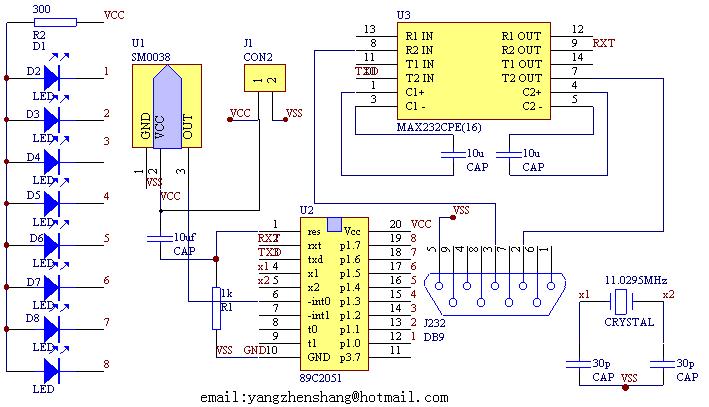
ļŖ┬ĘŠ═▀@├┤║å(ji©Żn)å╬┴╦Ż¼¼F(xi©żn)į┌Ęų╬÷Š▀¾wĄ─ŠÄ│╠▀^(gu©░)│╠░╔ĪŻ
╚ńłD╦∙╩ŠŻ¼panasonic▀b┐žŲ„Ą─▓©ą╬╩Ū▀@śėĄ─Ż©Įø(j©®ng)▀^(gu©░)Ę┤Å═(f©┤)£y(c©©)įćĄ─ĮY(ji©”)╣¹Ż®ĪŻ
ķ_╩╝╬╗╩Ūęį3.6msĄ═ļŖŲĮ╚╗║¾╩Ū3.6msĖ▀ļŖŲĮŻ¼╚╗║¾öĄ(sh©┤)ō■(j©┤)▒Ē╩Šą╬╩Į╩Ū0.9msĄ═ļŖŲĮ0.9msĖ▀ļŖŲĮų▄Ų┌×ķ1.8ms▒Ē╩ŠĪ░0Ī▒Ż¼ 0.9msĄ═ļŖŲĮ 2.4msĖ▀ļŖŲĮų▄Ų┌×ķ3.3ms▒Ē╩ŠĪ░1Ī▒Ż¼ŠÄīæ│╠ą“Ģr(sh©¬)Ż¼ęį┤¾ė┌3.4msąĪė┌3.8msĖ▀ļŖŲĮ×ķŲ╩╝╬╗Ż¼ęį┤¾ė┌2.2msąĪė┌2.7msĖ▀ļŖŲĮ▒Ē╩ŠĪ░1Ī▒Ż¼┤¾ė┌0.84msąĪė┌1.11msĖ▀ļŖŲĮ▒Ē╩ŠĪ░0Ī▒ĪŻę“┤╦Ż¼╬ęéāų„ę¬ė├å╬Ų¼ÖC(j©®)£y(c©©)┴┐Ė▀ļŖŲĮĄ─ķL(zh©Żng)Č╠üĒ(l©ói)┤_Č©╩ŪĪ░1Ī▒▀Ć╩ŪĪ░0Ī▒╝┤┐╔ĪŻČ©Ģr(sh©¬)Ų„0Ą─╣żū„ĘĮ╩ĮįO(sh©©)ų├×ķĘĮ╩Į1Ż║mov tmod,#09hŻ¼▀@śėįO(sh©©)ų├Č©Ģr(sh©¬)Ų„0╝┤╩Ū░čGATEų├1Ż¼16╬╗ėŗ(j©¼)öĄ(sh©┤)Ų„Ż¼ūŅ┤¾ėŗ(j©¼)öĄ(sh©┤)ųĄ×ķ2Ą─16┤╬ĘĮéĆ(g©©)ÖC(j©®)Ų„ų▄Ų┌Ż¼┤╦ĘĮ╩Įė╔═ŌųąöÓINT0┐žųŲŻ¼╝┤INT0×ķĖ▀Ģr(sh©¬)▓┼į╩įSėŗ(j©¼)öĄ(sh©┤)Ų„ėŗ(j©¼)öĄ(sh©┤)ĪŻ▒╚╚ńŻ║
jnb p3.2,$
jb p3.2,$
clr tr0
▀@3ŚlųĖ┴ŅŠ═┐╔ęį£y(c©©)┴┐ę╗éĆ(g©©)Ė▀ļŖŲĮŻ¼ĮėŽ┬üĒ(l©ói)ūx╚Īėŗ(j©¼)öĄ(sh©┤)ųĄTH0,TL0Š═┐╔ęįĘų▒µ╩ŪŲ╩╝╬╗▀Ć╩ŪĪ░1Ī▒╗“Ī░0Ī▒ĪŻį┌┤_Č©┤a▒Ēų«Ū░Ż¼─·┐╔ęį╩╣ė├P0┐┌Ą─8éĆ(g©©)░l(f©Ī)╣ŌČ■śO╣▄üĒ(l©ói)’@╩ŠŠÄ┤aŻ¼16╬╗ŠÄ┤aĘųā╔┤╬’@╩ŠŻ║
mov p0,keydata
acall delay_1s Ż╗//1msčėĢr(sh©¬)ūė│╠ą“
mov p0,keydata+1
ljmp main
Ė∙ō■(j©┤)P0ŽÓ└^Ą─ā╔┤╬’@╩ŠĄ─ŠÄ┤aŻ¼ėøõø├┐éĆ(g©©)░┤µIĄ─ŠÄ┤aŻ¼ą╬│╔ŠÄ┤a▒ĒŻ¼╝┤▀b┐žŲ„ŠÄ┤aĄ─ĮŌ┤a═Ļ«ģĪŻ┤a▒Ē┤_Č©ų«║¾Ż¼ęį║¾Įė╩šĄĮ▀b┐žŲ„Ą─ŠÄ┤aų«║¾Ż¼Š═┼c┤a▒Ē▒╚▌^Ż¼šęĄĮŲź┼õĄ─┤aĒŚ(xi©żng)Ż¼▓ó░čįō┤aĒŚ(xi©żng)ī”(du©¼)æ¬(y©®ng)Ą─Ēśą“╠¢(h©żo)▌ö│÷ĄĮP0┐┌Ż¼═¼Ģr(sh©¬)ę▓░čĒśą“╠¢(h©żo)Ž“┤«ąą┐┌▌ö│÷ĄĮļŖ─XŻ¼ļŖ─XĮė╩šįōöĄ(sh©┤)ō■(j©┤)║¾ė╔┤«┐┌▄ø╝■øQČ©╚ń║╬╠Ä└ĒĪŻ
│╠ą“▓╗ķL(zh©Żng)Ż¼Ž┬├µ╩Ū═Ļš¹Ą─│╠ą“║═ūóßīŻ║Ż©Ž╚┐┤┴„│╠łDŻ®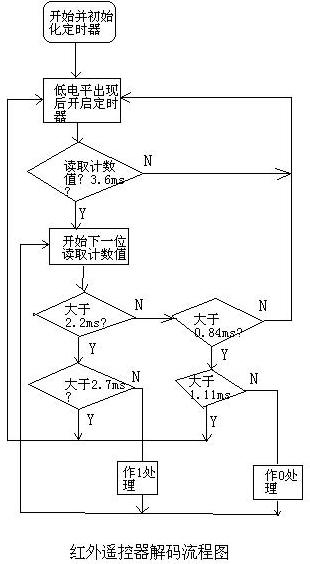
keydata equ 30h ;//įōĄžųĘ║═31HĄžųĘė├üĒ(l©ói)┤µĘ┼▀b┐žŲ„░┤µIŠÄ┤aĪŻ
org 00h
main:
mov keydata,#0 ;// ŪÕ┴Ń
mov tmod ,#09h ;//įO(sh©©)ų├Č©Ģr(sh©¬)0ĘĮ╩Į1Ż¼GATE=1
mov r7,#0 ;//ėŗ(j©¼)öĄ(sh©┤)Ų„Ż¼ė├üĒ(l©ói)ėŗ(j©¼)öĄ(sh©┤)╩ŪʱØM8╬╗
mov r6,#0 ;//ėŗ(j©¼)öĄ(sh©┤)Ų„Ż¼ė├üĒ(l©ói)ėŗ(j©¼)öĄ(sh©┤)╩ŪʱØM2ūų╣Ø(ji©”)Ż©ĮŌ16╬╗ŠÄ┤aŻ®
jb p3.2,$ ;//╩Ūʱ×ķĄ═ļŖŲĮ
again: ;//╚ń╣¹×ķĄ═Ż¼└^└m(x©┤)═∙Ž┬├µł╠(zh©¬)ąą
mov tl0,#0 ;//ŪÕ┴ŃTL0
mov th0,#0 ;//ŪÕ┴ŃTH0
setb tr0 ;//ķ_åóČ©Ģr(sh©¬)Ų„0
jnb p3.2,$ ;//Ą╚┤²Ė▀ļŖŲĮĄĮüĒ(l©ói)
jb p3.2,$ ;//Ė▀ļŖŲĮĄĮüĒ(l©ói)Ż¼┤╦Ģr(sh©¬)ķ_╩╝ėŗ(j©¼)öĄ(sh©┤)
clr tr0 ;//Ė▀ļŖŲĮĮY(ji©”)╩°Ż¼═Żų╣ėŗ(j©¼)öĄ(sh©┤)
mov a,th0 ;//ūx╚Īth0 ųĄŻ¼TL0║÷┬į▓╗ėŗ(j©¼)
clr c ;//
subb a,#12 ;//
jc again ;//th0<12ät▐D(zhu©Żn)Ż¼╝┤ąĪė┌3.4ms,─Ń┐╔ęį╦Ńę╗Ž┬▀@éĆ(g©©)Ģr(sh©¬)ķg
mov a,#14 ;//
clr c ;//
subb a,th0 ;//║═14▒╚▌^Ż¼╚ń╣¹TH0>14ät┤¾ė┌3.8ms
jc again ;//┤¾ė┌3.8msŻ¼Å─ą┬į┘Öz£y(c©©)
nextbit: ;//Ų╩╝╬╗šęĄĮ┴╦Ż¼╚╗║¾Ž┬ę╗╬╗
mov tl0,#0 ;//
mov th0,#0 ;//
setb tr0 ;//åóäė(d©░ng)Č©Ģr(sh©¬)Ų„
jnb p3.2,$ ;//Ą╚┤²Ė▀ļŖŲĮ
jb p3.2,$ ;//Ė▀ļŖŲĮĄĮüĒ(l©ói)Ż¼┤╦Ģr(sh©¬)ķ_╩╝ėŗ(j©¼)öĄ(sh©┤)
clr tr0 ;//Ė▀ļŖŲĮĮY(ji©”)╩°Ż¼═Żų╣ėŗ(j©¼)öĄ(sh©┤)
mov a,th0 ;//ūx╚Īėŗ(j©¼)öĄ(sh©┤)ųĄŻ¼TL0║÷┬į▓╗ėŗ(j©¼)
clr c ;//
subb a,#8 ;//th0║═8▒╚▌^
jc next ;;;;//╚¶ <2.2msät▐D(zhu©Żn)Ż¼į┘┼ąöÓ╩Ūʱ┤¾ė┌0.84ms
mov a,#10 ;//į┘Ė·10▒╚▌^
clr c ;//
subb a,th0 ;//
jc again ;;;;;;;//╚¶ >2.7msŻ¼ätĘ┼ŚēŻ¼Å─ą┬Öz£y(c©©)
mov a,keydata ;// Ę¹║Ž┤¾ė┌2.2ms ąĪė┌2.7msŻ¼╝┤×ķĪ░1Ī▒
setb c ;//C = 1
rrc a ;//░č1ęŲ╬╗▀M(j©¼n)A
mov keydata,a ;//▒Ż┤µ
inc r7 ;//ėŗ(j©¼)öĄ(sh©┤)Ų„╝ė1
cjne r7,#8,nextbit ;//╩ŪʱØM8╬╗
inc r6 ;//ėŗ(j©¼)öĄ(sh©┤)╝ė1
cjne r6,#2,last8 ;//╩ŪʱØMā╔ūų╣Ø(ji©”)
sjmp seach ;//▓╗ØMā╔ūų╣Ø(ji©”)Ż¼į┘ą┬▓╔╝»
last8: ;//ØM1ūų╣Ø(ji©”)Ż¼į┘ĮėŽ┬üĒ(l©ói)Ą┌Č■ūų╣Ø(ji©”)
mov keydata+1,a ;//░čĄ┌ę╗ūų╣Ø(ji©”)ŠÄ┤aöĄ(sh©┤)ō■(j©┤)▒Ż┤µĄĮ31h└’
mov r7,#0 ;//ėŗ(j©¼)öĄ(sh©┤)Ų„R7ŪÕ┴Ń
sjmp nextbit ;//└^└m(x©┤)▓╔╝»öĄ(sh©┤)ō■(j©┤)
next: ;//ąĪė┌2.2msĢr(sh©¬)▐D(zhu©Żn)ĄĮ▀@└’
mov a,th0 ;//ūx╚Īėŗ(j©¼)öĄ(sh©┤)ųĄTH0
swap a ;//Ė▀4╬╗┼cĄ═4╬╗ī”(du©¼)ōQ
mov r1,a ;//▒Ż┤µĄĮR1
anl tl0,#0f0h ;//╚ĪTL0Ė▀4╬╗Ż¼Ą═4╬╗║÷┬į▓╗ėŗ(j©¼)
mov a,tl0 ;//
clr c ;//
rrc a ;//
rrc a ;//
rrc a ;//
rrc a ;//
add a,r1 ;//
mov r1,a ;//
subb a,#30 ;//ęį╔ŽÄūąą╩Ū░čTH0Ą─Ą═4╬╗║═TL0Ą─Ė▀4╬╗║Ž▓ó×ķ1ūų╣Ø(ji©”)ū„×ķėŗ(j©¼)öĄ(sh©┤)ųĄ
jc nextbit ; //┼ąöÓ╩Ūʱ <0.84msŻ¼╩ŪätĘ┼ŚēŻ¼└^└m(x©┤)▓╔╝»
mov a,r1 ;//ʱ
clr c ;//
cjne a,#64,continue ;//Ė·64▒╚▌^
continue: ;//
jnc nextbit ; //a>64▒Ē╩Š▓╔śėųĄ >1.11ms Ę┼Śē
mov a,keydata ;//ʱät Ż¼Ę¹║Ž╬╗Ī░0Ī▒
clr c ;//C = 0
rrc a ;//░č┴ŃėęęŲ▀M(j©¼n)A
mov keydata,a ;//▒Ż┤µ
inc r7 ;//ėŗ(j©¼)öĄ(sh©┤)Ų„╝ė1
cjne r7,#8,nextbit ;//╩ŪʱØM8╬╗
inc r6 ;//ėŗ(j©¼)öĄ(sh©┤)Ų„╝ė1
cjne r6,#2,last_8 ;//╩ŪĄ┌ę╗ūų╣Ø(ji©”)ęčĮø(j©®ng)ØM
sjmp seach ;//
last_8: ;//╚ń╣¹×ķĄ┌Č■ūų╣Ø(ji©”)
mov keydata+1,a ;//ät▒Ż┤µĄ┌ę╗ūų╣Ø(ji©”)ĄĮ31h
mov r7,#0 ;//ŪÕ┴ŃR7
sjmp nextbit ;//
seach: ;//Ųź┼õ░┤µIŠÄ┤a
mov r0,#-2 ;//░┤µIŠÄ┤aūų╣Ø(ji©”)éĆ(g©©)öĄ(sh©┤)ėŗ(j©¼)öĄ(sh©┤)Ų„
mov r1,#-1 ;//░┤µIĒśą“ėŗ(j©¼)öĄ(sh©┤)Ų„
seach1: ;//
inc r0 ;//
seach2: ;//
inc r0 ;//
inc r1 ;//
cjne r1,#29,compare ;//╩ŪʱR1=29
sjmp exit0 ;//
compare: ;//ķ_╩╝Ųź┼õ
mov a,r0 ;//
mov dptr,#keycode ;//ĄžųĘųĖßśųĖŽ“┤a▒Ē╩ūųĘ
movc a,@a+dptr ;//╚Ī┤a
cjne a,keydata,seach1 ;//▒╚▌^
inc r0 ;//R0+1,į┘▒╚▌^Ž┬ę╗ūų╣Ø(ji©”)Ż©├┐éĆ(g©©)░┤µIŠÄ┤a×ķ2ūų╣Ø(ji©”)Ż®
mov a,r0 ;//
Ż╗mov dptr,#keycode ;//
movc a,@a+dptr ;//▒╚▌^
cjne a,keydata+1,seach2 ;//╩ŪʱŲź┼õŻ¼▓╗Ųź┼õät└^└m(x©┤)Ė·Ž┬ę╗ūų╣Ø(ji©”)▒╚▌^
mov p1,r1 ;//╚ń╣¹Ųź┼õŻ¼░č░┤µIĒśą“╠¢(h©żo)▌ö│÷ĄĮp1
send: ;//
mov tmod,#20h ; //įO(sh©©)ų├timer 1,mode 2
mov tl1,#0fdh ;//įO(sh©©)ų├Č©Ģr(sh©¬)Ų„│§ųĄ
mov th1,#0fdh ;//
mov scon,#01010000b;//ęį╔ŽįO(sh©©)ų├Ż¼╝┤įO(sh©©)ų├┤«┐┌▓©╠ž┬╩ŽĄöĄ(sh©┤)×ķŻ║9600,8,1,0
setb tr1 ;//åóäė(d©░ng)Č©Ģr(sh©¬)Ų„1
loop_s: ;//
mov sbuf,r1 ;//░čR1Ż©░┤µIĒśą“╠¢(h©żo)Ż®▌ö│÷ĄĮ┤«┐┌
jnb ti,$ ;//Ą╚┤²╩Ūʱ░l(f©Ī)╦══Ļ«ģ
clr ti ;//░l(f©Ī)╦══Ļ«ģŻ¼ŪÕ┴ŃTI
exit0: ;//
ljmp main ;//裣h(hu©ón)
keycode: ;//├┐?j©®)╔ūų╣?ji©”)┤·▒Ēę╗éĆ(g©©)░┤µIĄ─ŠÄ┤a
db 11111000b,00000000b, 11111100b,00000000b, 11111001b,11000000b
db 11111100b,11000000b, 11111010b,00000000b, 11111010b,00100000b
db 11111010b,01000000b, 11111010b,01100000b, 11111010b,10000000b
db 11111010b,10100000b, 11111010b,11000000b, 11111010b,11100000b
db 11111011b,00000000b, 11111011b,00100000b, 11111011b,01000000b
db 11111011b,01100000b, 11111111b,01100000b, 11111111b,10100000b
db 10001100b,10001110b, 10001101b,11101110b, 10001100b,10101110b
db 10001101b,11001110b, 11111000b,11100000b, 11111100b,10000000b
db 11111100b,01000000b, 11111001b,10100000b, 11111100b,10100000b
db 11111100b,01100000b
end
---------------------------------------------------------------------------------
Ė„ĘN▀b┐žŲ„ŠÄ┤a▓╗═¼Ż¼╚ń╣¹─Ń▓╔ė├Ą─╩ŪŲõ╦¹▀b┐žŲ„Ż¼ą▐Ė─ÄūéĆ(g©©)ģóöĄ(sh©┤)╝┤┐╔Ż©«ö(d©Īng)╚╗░┤µIĄ─ŠÄ┤a▒Ē┐ŽČ©▓╗═¼┴╦Ż®Ż¼╝┤ėŗ(j©¼)öĄ(sh©┤)Ų„Ą─ųĄ▓╗═¼Ż¼▓╗▀^(gu©░)ėąĄ─▀b┐žŲ„ėąÖC(j©®)Ų„┤aŻ©ÖC(j©®)Ų„┤a├┐éĆ(g©©)░┤µIČ╝╩Ūę╗śėĄ─Ż®Ż¼┤╦Ģr(sh©¬)┐╔ęį╠°▀^(gu©░)ÖC(j©®)Ų„┤aĄ─▓╔╝»ĪŻūŅ║¾ėąę╗³c(di©Żn)Žļ╠ßę╗Ž┬Ą─╩ŪŻ¼äéķ_╩╝▓╗ų¬Ą└▀b┐žŲ„Ą─ŠÄ┤a╩Ū▒╚▌^┬ķ¤®Ą─Ż¼╣Pš▀į┌Ī░ļp²łļŖūėĪ░ŠW(w©Żng)šŠŽ┬▌d┴╦éĆ(g©©)┬Ģ┐©╩Š▓©Ų„Ż¼ė├╦¹┐╔ęįę╗─┐┴╦╚╗ė^┐┤▀b┐žŲ„Ą─▓©ą╬Ż¼£y(c©©)┴┐Ųõ├}ø_īÆČ╚Ż¼ėą┴╦╦³┤_īŹ(sh©¬)ĘĮ▒Ń║▄ČÓŻ¼įō▄ø╝■┐╔ęįĄĮļp²ł╣½╦ŠŠW(w©Żng)šŠhttp://www.sl.com.cn/├Ō┘M(f©©i)Ž┬▌d╩╣ė├ĪŻ╚ń╣¹─ŃŽļė├▀b┐žŲ„▀b┐žļŖ─XŻ¼─Ń┐╔ęįūį╝║ŠÄīæę╗éĆ(g©©)Įė╩▄┤«ąą┐┌æ¬(y©®ng)ė├▄ø╝■Ż¼╗“š▀─Ń┐╔ęįų▒ĮėŽ┬▌d╩╣ė├Girder▀@éĆ(g©©)▄ø╝■Ż¼įō▄ø╝■╩ŪīŻķT×ķ┤«┐┌▀b┐žŲ„ū÷Ą─Ż¼║▄║├ė├Ż¼Ž┬▌dĄžųĘ×ķŻ║http://www.girder.nl/Ż¼─Ń┐╔ęį└¹ė├▀@éĆ(g©©)▄ø╝■Č©┴x▀b┐žŲ„üĒ(l©ói)▀b┐ž─ŃļŖ─XęŲäė(d©░ng)╩¾ś╦(bi©Īo)ĪóµI▒P▓┘ū„Īó╔ŽŠW(w©Żng)×gė[Īó┤“ķ_▓źĘ┼Ų„ĪóĻP(gu©Īn)ÖC(j©®)Ą╚ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō(y©©)├µ
╦óą┬Ēō(y©©)├µ Ž┬ĄĮĒō(y©©)Ąū
Ž┬ĄĮĒō(y©©)Ąū