
S7-200 有兩個 置PTO/PWM 發生器,用以建立高速脈沖串(PTO)或脈寬調節(PWM) 信號波形。
當組態一個輸出為PTO 操作時,生成一個50%占空比脈沖串用于步進電機或伺服電機的速度和位置的開環控制。置PTO功能提供了脈沖串輸出,脈沖周期和數量可由用戶控制。但應用程序必須通過plc內置I/O 提供方向和限位控制。
為了簡化用戶應用程序中位控功能的使用,STEP7--Micro/WIN 提供的位控向導可以幫助您在幾分鐘內全部完成PWM,PTO或位控模塊的組態。向導可以生成位置指令,用戶可以用這些指令在其應用程序中為速度和位置提供動態控制。
2、開環位控用于步進電機或伺服電機的基本信息
借助位控向導組態PTO 輸出時,需要用戶提供一些基本信息,逐項介紹如下:
⑴ 最大速度 (MAX_SPEED)和啟動/停止速度 (SS_SPEED)
圖1是這2 個概念的示意圖。
MAX_SPEED是允許的操作速度的最大值,它應在電機力矩能力的范圍。驅動負載所需的力矩由摩擦力、慣性以及加速/減速時間決定。
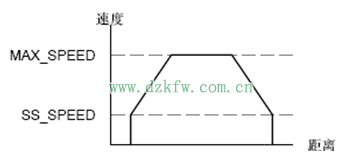
圖1 最大速度和啟動/停止速度示意
SS_SPEED:該數值應滿足電機在低速時驅動負載的能力,如果SS_SPEED的數值過低,電機和負載在運動的開始和結束時可能會搖擺或顫動。如果SS_SPEED的數值過高,電機會在啟動時丟失脈沖,并且負載在試圖停止時會使電機超速。通常,SS_SPEED 值是MAX_SPEED 值的5%至15%。
⑵加速和減速時間
加速時間ACCEL_TIME:電機從SS_SPEED速度加速到MAX_SPEED速度所需的時間。
減速時間DECEL_TIME:電機從MAX_SPEED速度減速到SS_SPEED速度所需要的時間。

圖2 加速和減速時間
加速時間和減速時間的缺省設置都是1000毫秒。通常電機可在小于1000 毫秒的時間工作。參見圖2。這2個值設定時要以毫秒為單位。
注意:電機的加速和失速時間要過測試來確定。開始時,您應輸入一個較大的值。逐漸減少這個時間值直至電機開始失速,從而優化您應用中的這些設置。
⑶移動包絡
一個包絡是一個預先定義的移動描述,它包括一個或多個速度,影響著從起點到終點的移動。一個包絡由多段組成,每段包含一個達到目標速度的加速/減速過程和以目標速度勻速運行的一串固定數量的脈沖。位控向導提供移動包絡定義界面,在這里,您可以為您的應用程序定義每一個移動包絡。PTO 支持最大100 個包絡。
定義一個包絡,包括如下幾點:①選擇操作模式;②為包絡的各步定義指標。③為包絡定義一個符號名。
⑴選擇包絡的操作模式:
PTO支持相對位置和單一速度的續轉動,如圖3所示,相對位置模式指的是運動的終點位置是從起點側開始計算的脈沖數量。單速續轉動則不需要提供終點位置,PTO一直持續輸出脈沖,直至有其他命令發出,例如到達原點要求停發脈沖。
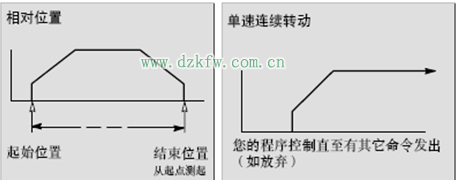
圖3 一個包絡的操作模式
⑵包絡中的步
一個步是工件運動的一個固定距離,包括加速和減速時間 的距離。PTO 每一包絡最大允許29 個步。
每一步包括目標速度和結束位置或脈沖數目等幾個指標。圖4 所示為一步、兩步、三步和四步包絡。注意一步包絡只有一個常速段,兩步包絡有兩個常速段,依次類推。步的數目與包絡中常速段的數目一致。
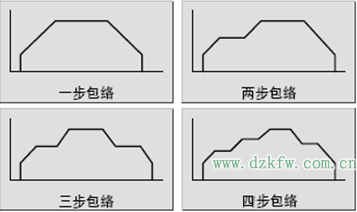
圖4 包絡的步數示意
3、使用位控向導編程
STEP7 V4.0 軟件的位控向導能自動處理PTO脈沖的單段管線和多段管線、脈寬調
制、SM 位置配置和創建包絡表。
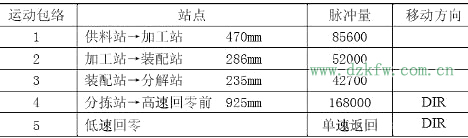
本節將給出一個在YL-335A 上實現的簡單工作任務例子,闡述使用位控向導編程的方法和步驟。表1 是YL-335A 上實現步進電機運行所需的運動包絡。
表1 步進電機運行的運動包絡
1、使用位控向導編程的步驟如下:
1)為S7--200 PLC選擇選項組態 置PTO/PWM操作。
在STEP7 V4.0軟件命令菜單中選擇工具→位置控制向導并選擇配置S7-200PLC內
置PTO/PWM操作,如圖5所示。

圖5 位控向導啟動界面
2)單擊“下一步”選擇“QO.0”,再單擊“下一步”選擇“線性脈沖輸出 PTO)”
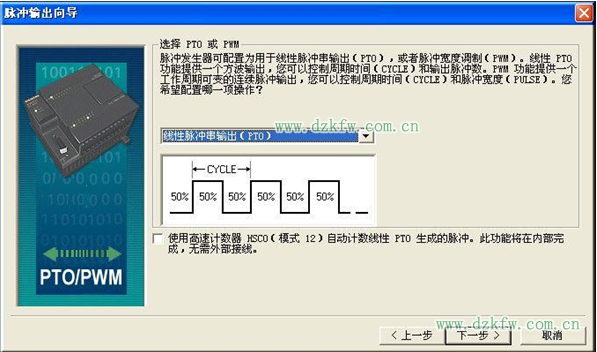
圖5 選擇PTO或PWM界面
3)單擊“下一步”后,在對應的編輯框中輸入MAX_SPEED 和SS_SPEED 速度值。輸入最高電機速度“90000”,把電機啟動/停止速度設定為“600”。這時,如果單擊MIN_SPEED值對應的灰色框,可以發現,MIN_SPEED值改為600,注意:MIN_SPEED值由計算得出。用戶不能在此域中輸入其他數值。
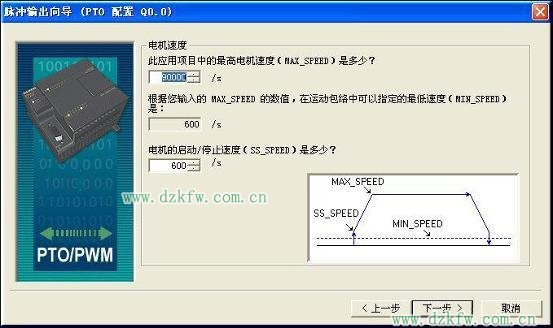
圖6
4)單擊“下一步”填寫電機加速時間“1500”和電機減速時間 “200”
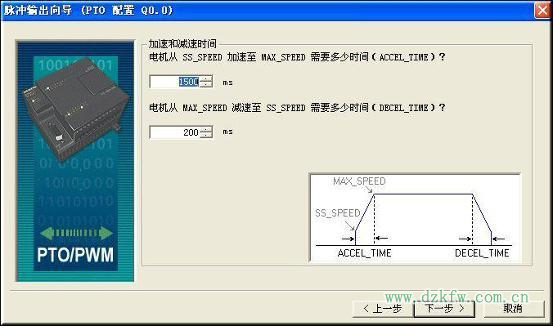
圖7 設定加速和減速時間
5)接下來一步是配置運動包絡界面,見圖8。

圖8 配置運動包絡界面
該界面要求設定操作模式、1個步的目標速度、結束位置等步的指標,以及定義這一包絡的符號名。(從第0個包絡第0步開始)
在操作模式選項中選擇相對位置控制,填寫包絡“0”中數據目標速度“60000”,結束位置“85600”,點擊“繪制包絡”,如圖9所示,注意,這個包絡只有1步。包絡的符號名按默認定義。這樣,第0個包絡的設置,即從供料站→加工站的運動包絡設置就完成了。現在可以設置下一個包絡。

圖9 設置第0個包絡
點擊“新包絡”,按上述方法將下表中上3個位置數據輸入包絡中去。

表中最后一行低速回零,是單速連續運行模式,選擇這種操作模式后,在所出現的界面中(見圖10),寫入目標速度“20000”。界面中還有一個包絡停止操作選項,是當停止信號輸入時再向運動方向按設定的脈沖數走完停止,在本系統不使用。
6)運動包絡編寫完成單擊“確認”,向導會要求為運動包絡指定V存儲區地址(建議地址為VB75~VB300),默認這一建議,單擊“下一步”出現圖11,單擊 “完成”。
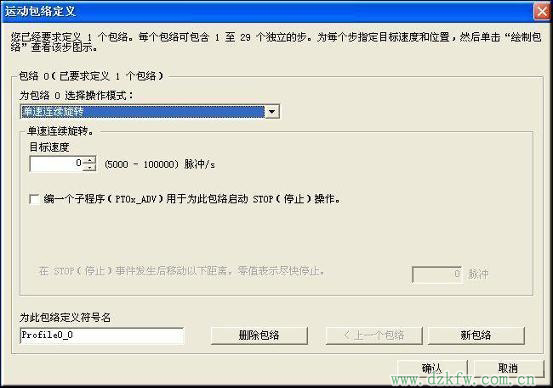
圖11 生成項目組件提示
2、項目組件
運動包絡組態完成后,向導會為所選的配置生成三個項目組件(子程序),分別是:PTOx_RUN子程序(運行包絡),PTOx_CTRL子程序(控制)和PTOx_MAN子程序(手動模式)子程序。一個由向導產生的子程序就可以在程序中調用如圖12所示。
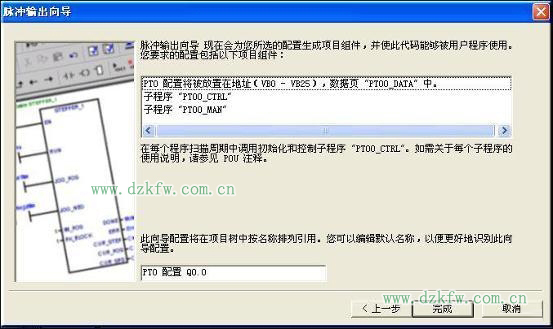
圖12 三個項目組件
它們的功能分述如下:
⑴ PTOx_RUN子程序(運行包絡):命令 PLC 執行存儲于配置/包絡表的特定包絡中的運動操作。運行這一子程序的梯形圖如圖13所示。
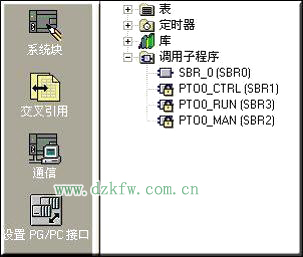
圖13 運行PTOx_RUN子程序
EN位:啟用此子程序的使能位。
START參數:包絡的執行的啟動信號。對于在START參數已開啟且PTO當前不活動時的每次掃描,此子程序會激活PTO。為了確保僅發送一個命令,請使用上升緣以脈沖方式開啟START參數。
Profile(包絡)參數:包含為此運動包絡指定的編號或符號名。
Abort(終止)參數命令,開啟時位控模塊停止當前包絡并減速至電機停止。
Done(完成)參數:當模塊完成本子程序時,此參數 ON。
Error(錯誤)參數:包含本子程序的結果。
C_Profile參數:包含位控模塊當前執行的包絡。
C_Step參數:包含目前正在執行的包絡步驟。
⑵ PTOx_CTRL子程序:(控制)啟用和初始化與步進電機或伺服電機合用的PTO輸出。請在用戶程序中只使用一次,并且請確定在每次掃描時得到執行。即始終使用SM0.0作為EN的輸入,如圖14所示。
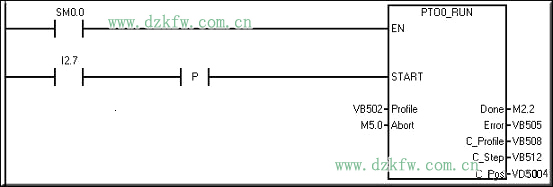
圖14 運行PTOx_CTRL子程序
I_STOP(立即停止)輸入:開關量輸入。當此輸入為低時,PTO功能會正常工作。當此輸入變為高時,PTO立即終止脈沖的發出。
D_STOP(減速停止)輸入:開關量輸入。當此輸入為低時,PTO功能會正常工作。當此輸入變為高時,PTO會產生將電機減速至停止的脈沖串。“完成”輸出:開關量輸出。當“完成”位被設置為高時,它表明上一個指令也已執行。
Error(錯誤)參數:包含本子程序的結果。當“完成”位為高時,錯誤字節會報告無錯誤或有錯誤代碼的正常完成。如果PTO向導的HSC計數器功能已啟用,C_Pos參數包含用脈沖數目表示的模塊;否則此數值始終為零。
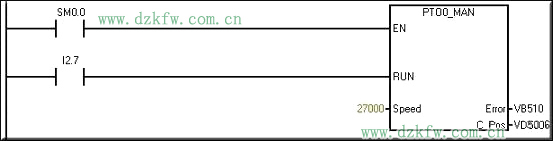
⑶ PTOx_MAN子程序(手動模式):將PTO輸出置于手動模式。這允許電機啟動、停止和按不同的速度運行。當PTOx_MAN子程序已啟用時,任何其他PTO子程序都無法執行。運行這一子程序的梯形圖如圖15所示。
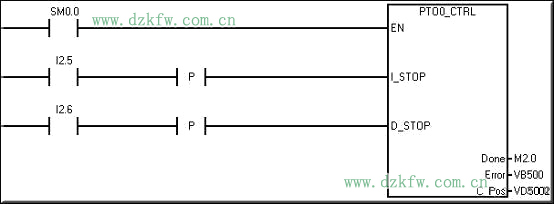
圖15 運行PTOx_MAN子程序
RUN(運行/停止)參數:命令PTO加速至指定速度(Speed(速度)參數)。您可以在電機運行中更改Speed參數的數值。停用RUN參數命令PTO減速至電機停止。當RUN已啟用時,Speed參數確定著速度。速度是一個用每秒脈沖數計算的DINT(雙整數)值。您可以在電機運行中更改此參數。
Error(錯誤)參數包含本子程序的結果。
如果PTO向導的HSC計數器功能已啟用,C_Pos參數包含用脈沖數目表示的模塊;否則此數值始終為零。
注:
脈沖速率是指每秒發多少個脈沖,用來控制電機速度
脈沖數量是指一共發的脈沖個數,用來控制電機行程
脈沖速率X時間=脈沖數量
電機速度X時間=電機行程
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底