
ÖCąĄ▒█┐žųŲīŹ“×
īŹ“×ę╗ ÖCąĄ▒█┐žųŲīŹ“×
ę╗ĪóīŹ“×─┐Ą─
1Ż«┴╦ĮŌÖCąĄ▒█Ą─ĮM│╔╝░ąį─▄ųĖś╦Ż╗
2Ż«┴╦ĮŌÖCąĄ▒█Ą─ÖCąĄŽĄĮy║═┐žųŲŽĄĮyĄ─ĮM│╔Īó╣żū„įŁ└ĒŻ╗
3Ż«┴╦ĮŌÖCąĄ▒█═Ļ│╔░ß▀\čb┼õū„śIĄ─▀^│╠Ż¼šŲ╬šÖCąĄ▒█╩ŠĮ╠ū„śIĄ─ĘĮĘ©ĪŻ
Č■ĪóīŹ“×įOéõ
╦─ūįė╔Č╚ÖCąĄ▒█╝░┐žųŲ╣±Ż¼ėŗ╦ŃÖCŻ¼ÜŌ▒├Ż¼čb┼õ▌SĪó╠ūĪŻ
╚²ĪóīŹ“×įŁ└Ē
▒ŠīŹ“×╩╣ė├Ą─╦─ūįė╔Č╚╩ŠĮ╠į┘¼F╩ĮÖCąĄ▒█▓╔ė├┤«┬ōŲĮ├µ╩Įķ_µ£ĮYśŗĪŻÖCąĄ▒█Ė„ĻP╣Ø▓╔ė├╦┼Ę■ļŖÖC║═▓Į▀MļŖÖC╗ņ║Ž“īäėŻ¼▓ó═©▀^Windows ŁhŠ│Ž┬Ą─▄ø╝■ŠÄ│╠║═▀\äė┐žųŲ┐©īŹ¼Fī”ÖCąĄ▒█Ą─┐žųŲŻ¼╩╣ÖCąĄ▒█─▄ē“į┌▀\äėĘČć·ā╚╚╬ęŌ╬╗ų├Š½┤_Č©╬╗ĪŻ
ÖCąĄ▒█Ą─╩ŠĮ╠Īóį┘¼F╩Ū╩ŠĮ╠į┘¼Fą═ÖCąĄ▒█īŹ¼FÖCąĄ▒█ū„śIĄ─ā╔éĆ▀^│╠ĪŻį┌╩ŠĮ╠▀^│╠ųąŻ¼▓┘ū„š▀═©▀^╩ŠĮ╠║ą╗“ėŗ╦ŃÖCŲ┴─╗╔ŽĄ─╩ŠĮ╠Įń├µ▓┘ū„ÖCąĄ▒█▀\äėŻ¼ėŗ╦ŃÖCŽĄĮyā╚░▓čbĄ─╩ŠĮ╠▄ø╝■īóÖCąĄ▒█▀\äė▄ē█EĖ„Č╬Ą─Ų³c║═ĮK³cĪó▀\äėŅÉą═Īó▀\äė╦┘Č╚Ą╚ą┼ŽóūįäėĄžėøõøį┌ėŗ╦ŃÖC┤µā”Ų„ųąŻ╗į┌į┘¼F▀^│╠ųąŻ¼ųžĘ┼┤µā”Ų„ųą┤µā”Ą─Ė„Č╬▄ē█EĄ─▀\äėŅÉą═║═▀\äė╦┘Č╚Ż¼▓ó═©▀^▓Õča╦ŃĘ©ėŗ╦Ń│÷Ė„Č╬▄ē█EĄ─Ų³c║═ĮK³cųąķgĄ─Ė„éĆ╬╗ų├³cŻ¼ū„×ķļŖÖC╦┼Ę■ŽĄĮyĄ─ųĖ┴ŅŻ¼Å─Č°į┘¼F╩ŠĮ╠▀^Ą─ū„śI│╠ą“ĪŻ╚ńąĶĖ³Ė─ū„śI│╠ą“ĢrŻ¼ätąĶųžą┬═Ļ│╔╩ŠĮ╠║═į┘¼FĄ─▓┘ū„ĪŻ
ÖCąĄ▒█░┤▀\äė▄ē█E┐žųŲĘĮ╩Į┐╔Ęų×ķ³cĄĮ³cŻ©PTPŻ®▀\äė┐žųŲ║═▀B└m▄ē█EŻ©CPŻ®▀\äė┐žųŲĪŻ
╦─ĪóīŹ“×ā╚╚▌
1Ż«ÖCąĄ▒█Ą─ÖCąĄŽĄĮyšJūR
▒ŠÖCąĄ▒█Š▀ėą4éĆūįė╔Č╚Ż¼╝┤č³ĻP╣ØŻ©ĻP╣Ø1Ż®Īó▒█ĻP╣ØŻ©ĻP╣Ø2Ż®ĪóųŌĻP╣ØŻ©ĻP╣Ø3Ż®Īó═¾ĻP╣ØŻ©ĻP╣Ø4Ż®Ė„ūįĄ─╗ž▐D▀\äėĪŻ
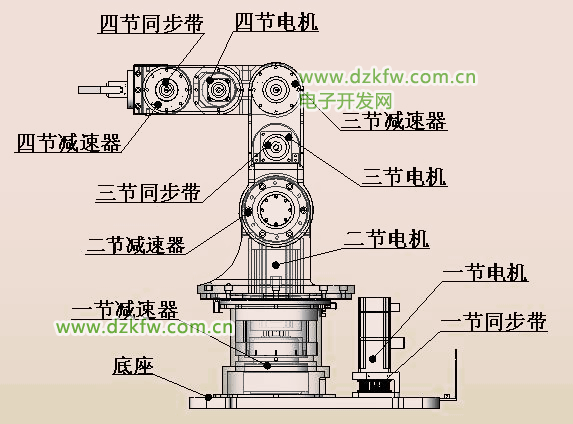
łD1-1 ÖCąĄ▒█Ą─é„äė║åłD
ÖCąĄ▒█Ą─ŖA│ų╣”─▄╩Ū═©▀^░▓čbį┌╩ų═¾Ū░Č╦Ą─╩ųū”üĒ═Ļ│╔Ą─ĪŻ▒ŠÖCąĄ▒█▓╔ė├ÜŌäė╩ųū”ÖCśŗüĒ═Ļ│╔ūź╚Īū„śIŻ¼╩ųū”Ą─ś╦ĘQžō▌d×ķ2kgĪŻÖCąĄ▒█Ą─ÜŌäėŖA│ųčbų├ė╔ÜŌ▒├Īóė═╦«ĘųļxŲ„Īó┐žųŲķyĪó╩ųū”╝░ÜŌ╣▄╬Õ▓┐ĘųĮM│╔ĪŻ
2Ż«ÖCąĄ▒█Ą─┐žųŲŽĄĮyšJūR
▒ŠÖCąĄ▒█Ą─ļŖ┐žŽĄĮyų„ę¬ė╔ėŗ╦ŃÖCŽĄĮyĪóļŖÖC╝░ļŖÖC“īäėŲ„Īóé„ĖąŲ„ĪóļŖį┤Īó▓┘ū„ļŖ┬ĘĪó┐žųŲ╣±Ą╚▓┐ĘųĮM│╔ĪŻ
3Ż«ÖCąĄ▒█░ß▀\čb┼õīŹ“×
ÖCąĄ▒█Ą─░ß▀\čb┼õĘų│╔╩ŠĮ╠Īóį┘¼Fā╔éĆ▀^│╠ĪŻÖCąĄ▒█Ą─╩ŠĮ╠┤░┐┌░³║¼ĻP╣Øą┼ŽóĪó─®Č╦ū°ś╦ą┼ŽóĪó╩ŠĮ╠║ąĪóÖCąĄ▒█ĀŅæBą┼ŽóĪó╩ŠĮ╠³cą┼Žó┴ą▒ĒĪó╩ŠĮ╠╦┘Č╚┐žųŲ║═╩ŠĮ╠┐žųŲĄ╚▓┐ĘųĪŻ
╬ÕĪóīŹ“×▓Į¾E
1Ż«ĮķĮBÖCąĄ▒█Ą─ąį─▄ųĖś╦╝░ÖCąĄŽĄĮyĄ─Ė„ĮM│╔▓┐ĘųŻ©Į╠Ĥč▌╩ŠŻ®Ż╗
2Ż«ĮķĮBÖCąĄ▒█Ą─ļŖ┐žŽĄĮyĖ„ĮM│╔▓┐ĘųŻ©Į╠Ĥč▌╩ŠŻ®Ż╗
3Ż«ÖCąĄ▒█░ß▀\čb┼õīŹ“×
1Ż®▀BĮė║├┐žųŲ╣±ļŖį┤Ż¼ķ_åóėŗ╦ŃÖC║¾Ż¼ą²▐D┐žųŲ╣±╔ŽĶĆ│ūęįķ_åóļŖį┤ķ_ĻPŻ¼Ą╚┤²┐žųŲ╣±Ą─ł¾Š»ųĖ╩Š¤¶ūā╗ę║¾Ż¼░┤Ž┬┐žųŲ╣±Ą─Ī░╦┼Ę■ķ_åóĪ▒░┤ŌoŻ¼Ą╚┤²ūāŠG║¾ĘĮ┐╔▓┘ū„ĪŻ
2Ż®▀\ąąÖCąĄ▒█Į╠īW▄ø╝■Ż¼▀M╚ļ▄ø╝■ų„Įń├µŻ¼³cō¶Ī░ÖCąĄ▒█Å═╬╗Ī▒░┤ŌoŻ¼Å═╬╗║¾³cō¶Ī░ÖCąĄ▒█╩ŠĮ╠Ī▒░┤ŌoŻ¼ÅŚ│÷╩ŠĮ╠┤░┐┌ĪŻ
3Ż®į┌Ī░╩ŠĮ╠╦┘Č╚┐žųŲĪ▒ā╚Ż¼═©▀^ęŲäėųĖßś▀xō±╩ŠĮ╠╦┘Č╚ĪŻ
4Ż®į┌Ī░╩ŠĮ╠║ąĪ▒ā╚Ż¼═©▀^┐žųŲĖ„ĻP╣ØĄ─▀\äėĘĮŽ“Īó╩ųū”ĀŅæBĄ╚░┤ŌoüĒ┐žųŲÖCąĄ▒█╩ŠĮ╠▀\äėĪŻ«ö├┐éĆĻP╣Ø▀\äėĄĮĻPµI╬╗ų├╠ÄŻ¼ąĶ░┤Ž┬Ī░ėøõøĪ▒░┤ŌoėøõøŽ┬╩ŠĮ╠ą┼ŽóŻ¼ų▒ų┴š¹éĆ░ß▀\čb┼õ▀^│╠═Ļ│╔ĪŻ
5Ż®³cō¶Ī░▒Ż┤µĪ▒░┤ŌoŻ¼▒Ż┤µ╩ŠĮ╠╬─╝■ĪŻ
6Ż®³cō¶Ī░Å═╬╗Ī▒░┤ŌoŻ¼ÖCąĄ▒█╗žĄĮĄč┐©Ā¢ū°ś╦ŽĄĄ─įŁ³c╬╗ų├ĪŻ
7Ż®³cō¶Ī░į┘¼FĪ▒░┤ŌoŻ¼ÖCąĄ▒█░┤ššėøõøĄ─ÖCąĄ▒█ĻP╣Øą┼Žóį┘¼Fę╗▒ķ▀\äė▄ē█EĪŻ
8Ż®³cō¶Ī░ŪÕ┴ŃĪ▒░┤ŌoŻ¼ŪÕ│²ĻP╣Øą┼ŽóĪó─®Č╦³cą┼Žó║═╩ŠĮ╠ą┼Žó┴ą▒ĒĪŻ
9Ż®³cō¶Ī░Å═╬╗Ī▒░┤ŌoŻ¼ÖCąĄ▒█ū÷╗ž┴Ń▀\äėĪŻ
10Ż®╚ń╣¹Žļį┘¼FĄ┌Č■┤╬Ż¼ų╗ąĶ³cō¶Ī░┤“ķ_Ī▒░┤ŌoŻ¼šęĄĮŽÓæ¬╩ŠĮ╠╬─╝■Ż¼╚╗║¾³cō¶Ī░ūRäe╩ŠĮ╠³cĪ▒Ż¼ųžÅ═6Ż®Īó7Ż®Īó
8Ż®Īó9Ż® ▓Į¾E╝┤┐╔ĪŻ
11Ż®ĻPķ]Į╠īWÖCąĄ▒█▄ø╝■ĪŻ░┤Ž┬Į╠īWÖCąĄ▒█┐žųŲ╣±Ą─Ī░╦┼Ę■ĻPķ]Ī▒░┤ŌoŻ¼Ą╚┤²ūā╝t║¾Ż¼ą²▐D┐žųŲ╣±╔ŽĶĆ│ūŻ¼ĻPķ]ļŖį┤ķ_ĻPĪŻ
┴∙Īó╦╝┐╝Ņ}
1Ż«ųĖ│÷ÖCąĄ▒█Ė„ĻP╣Ø╦∙▓╔ė├Ą─ł╠ąąį¬╝■║═é„äė▓┐╝■ĪŻ
2Ż«į§├┤┐žųŲÜŌäė╩ųū”Ą─ŖA│ų┴”Ż┐į§śėš{╣ØÜŌäė╩ųū”Ą─ęŲäė╦┘Č╚Ż┐
3Ż«═©▀^▒ŠīŹ“×┐éĮYÖCąĄ▒█╩ŠĮ╠ŻŁį┘¼FĄ─Ė┼─ŅĪŻ
4Ż«ÖCąĄ▒█į┌▀\äė┐žųŲ▀^│╠ųąŻ¼╠▌ą╬Ū·ŠĆ▀\äė║═Są╬Ū·ŠĆ▀\äė─Ż╩ĮĖ„ėą╩▓├┤╠ž³cŻ┐
5Ż«ÖCąĄ▒█Ą─PTP▀\äė┐žųŲ┼cCP▀\äė┐žųŲĘĮ╩ĮĖ„ėą║╬╠ž³cŻ┐┼e│÷ÖCąĄ▒█į┌╣żśI┐žųŲųąPTP┐žųŲ║═CP┐žųŲĄ─īŹ└²Ż┐
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū