
╬ęéā═Ų│÷┴╦ę╗ĒŚą┬ėŗäØŻ¼╝┤═©▀^╩╣ė├┴╦ArduinoĄ─║åå╬ųŲū„üĒīW┴ĢļŖūėųŲū„Ą─įŁ└Ē║═╗∙ĄAų¬ūRĪŻ┤╦┤╬×ķ╬ęéāĘųŽĒĄ─╝╬┘e╩Ūę┴╠┘╔ą╬┤Ž╚╔·Ż¼╦¹╗Ņ▄Sė┌├Į¾w╦ćągŅIė“Ż¼▓óŪęį┌Ģ°╝«ŅIė“ęįųvĮŌĪ░Ė³╔Ņīė┤╬Ą─įŁ└ĒĪ▒Č°┬ä├¹ĪŻį┌Ą┌5Ų¬Ż¼ę▓Š═╩ŪūŅ║¾ę╗Ų¬Ż¼╬ęéāīóė├ArduinoüĒ┐žųŲ╦┼Ę■ļŖÖCĪŻ
1. Ū░čį
┤¾╝ę║├ŻĪ╬ę╩Ūę┴╠┘╔ą╬┤ĪŻ
į┌▀@éĆ▀B▌dŽĄ┴ąųąŻ¼╬ęéāćLįć═©▀^Arduino┐žųŲūīĖ„ĘNū„ŲĘäėŲüĒŻ¼┐╝æ]ĄĮ▀Ćėą╬ęø]ėąįć▀^Ą─▓┐╝■Ż¼╦∙ęį╬ęøQČ©ĮĶ┤╦ÖCĢ■ćLįćę╗Ž┬Ż¼─ŪŠ═╩ŪĪ░╦┼Ę■ļŖÖCĪ▒ĪŻ
šfŲĪ░╬ó┐žųŲŲ„+äėū„Ī▒Ż¼Š═Ģ■ūī╚╦ŽļŲÖCŲ„╚╦Ż¼Ą½Š═╬ęČ°čįŻ¼╬ęė├▀^ę╗ą®▒╚▌^įŁ╩╝Ą─¢|╬„Ż©▒╚╚ń╠’īm²X▌å║═╚fīÜų┴ļŖÖCŻ®üĒīŹ¼FĪŻ«ö╚╗Ż¼ī”ė┌¼F┤·Ą─ÖCŲ„╚╦Č°čįŻ¼╩╣ė├Ą─▀\äė▓┐╝■Š═╩Ū╦┼Ę■ļŖÖCĪŻį┌╬ęĄ─║ó╠ßĢr┤·Ż¼į°Įøėąę╗ĻćļŖäė▀b┐ž▄ć¤ßŻ¼╬ęėøĄ├╬ęĮø│Ż║═┼¾ėčéāę╗Ų═µĪŻ
«ö╚╗Ż¼«öĢrę▓╩Ū│¼╝ē┼▄▄ć¤ß│▒Ą─Ģr┤·Ż¼ŲĘ┼Ų░³└©╠m▓®╗∙─ßĪó╦{ŲņüåĪó▒ŻĢrĮ▌Ą╚║└▄ćĪŻ╬ęėøĄ├«öĢrė╔ė┌¤oŠĆļŖ┐žųŲŲ„Ą─╩ų▒·║═╝ė╦┘Ų„╩╣ė├┴╦╦┼Ę■ļŖÖCŻ¼▀b┐ž▄ćĢ■Ė∙ō■┐žųŲŲ„▓┘┐vŚUĄ─ęŲäėČ°ęŲäėŻ¼ūī╬ęėXĄ├║▄▓╗┐╔╦╝ūhŻ¼Å──ŪĢrŲ╬ęī”╦┼Ę■ļŖÖCĄ─▒Ē¼FŠ═┼ÕĘ■Ą├║▄ĪŻ
─ŪĢrŻ¼╬ęų╗─▄░┤ššĪ░╦³ų«╦∙ęį─Ūśėäėū„Ż¼╩Ūę“×ķ╦³Š═╩Ū─ŪśėĄ─ÖCųŲĪ▒üĒ└ĒĮŌŻ¼Ą½¼Fį┌╬ę╔Ņ┐╠ęŌūRĄĮį┌▓╗┐╔╦╝ūhųą╦╝┐╝Ī░─ŪĘNÖCųŲĪ▒╩Ū║▄ųžę¬Ą─ĪŻ
Į³─ĻüĒŻ¼ÖCŲ„╚╦ųą╦∙ė├Ą─╦┼Ę■ļŖÖC═©│Ż╩ŪĘĮą╬═ŌÜżŻ¼Ä¦ėąłA▒P╗“Šžą╬┬ō▌SŲ„Ż©ČµÖCŻ®Ż¼┼cęįŪ░Ą─śėūėŽÓ▒╚Äū║§ø]╩▓├┤ūā╗»Ż¼ę“┤╦─▄ę╗č█Š═┐┤│÷üĒĪŻ▓╗▀^┐╝æ]ĄĮ┐╔─▄ėą╚╦ī”╦³Ą─ā╚▓┐▓ó▓╗╩ŪĘŪ│Ż┴╦ĮŌŻ¼╦∙ęį╬ęŽļĮĶ┤╦ÖCĢ■į┘ųžą┬蹊┐ę╗Ž┬ĪŻ
2. ╩▓├┤╩Ū╦┼Ę■ļŖÖCŻ┐
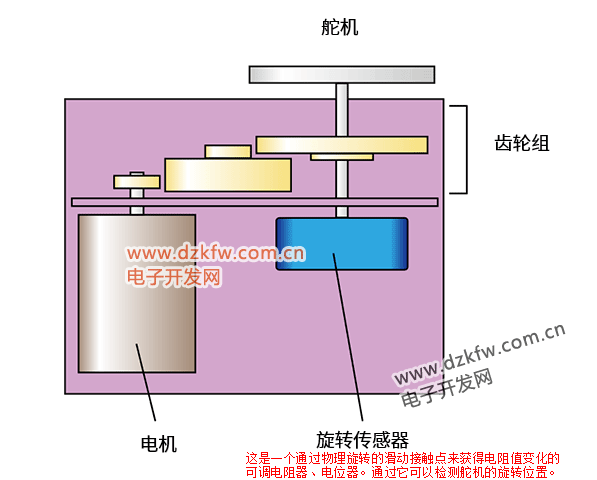
Å─ÅV┴x╔ŽųvŻ¼╦┼Ę■ļŖÖCŠ▀ėą▌Są²▐DÖz£yÖCśŗŻ¼▓óŠ▀ėąą²▐DĮŪČ╚Īóą²▐D╬╗ų├║═╦┘Č╚Ą╚Ą─┐žųŲ╣”─▄Ż¼ę“┤╦ę▓ė├ė┌ųžą═ÖCąĄ║═╣żÅS╔·«aŠĆĄ╚æ¬ė├ŅIė“ĪŻ
▓╗▀^ī”ė┌╬ęéāüĒšfŻ¼Ė„ĘN╦┼Ę■ļŖÖCųąŻ¼¤oŠĆļŖ▀b┐žįOéõ║═─Żą═ÖCŲ„╚╦Ą╚įOéõųą╩╣ė├Ą─ļŖÖCŅÉą═╩Ū╬ęéāį┌ļŖūėųŲū„▀^│╠ųąūŅ×ķ╩ņŽżĄ─ĪŻ«ö╚╗Ż¼į┌ė├ArduinoĄ╚╬ó┐žųŲŲ„üĒ╩╣▀\äė▓┐╝■Ž±ÖCŲ„╚╦ę╗śėäėŲüĒĄ─æ¬ė├ųąŻ¼ę▓Ģ■╩╣ė├│Żė├Ą─╦┼Ę■ļŖÖCĪŻ
─Ū├┤Ż¼Öz£yļŖÖCą²▐DĄ─ÖCśŗĄĮĄū╩Ūį§śėĄ──žŻ┐
Å─ĮYśŗłD┐┤Ż¼ČÓ×ķŽ┬╩÷ĮYśŗŻ¼┐┤ŲüĒ▓ó▓╗─░╔·Ą─śėūėĪŻ
▓╗╣▄į§śėŻ¼╬ęŽļ┐┤┐┤╦³Ą─šµ├µ├▓Ż¼╦∙ęį░č╦³▓ĮŌķ_┴╦ĪŻśėŲĘ×ķ┤¾ąĪš²║Ž▀mĄ─GWS╣½╦Š╔·«aĄ─S03T/2BBMG/FUTABAĪŻ
╩ūŽ╚Ż¼╬ę▓Ž┬ȵÖC║═╦─éĆĮŪĄ─┬▌ĮzŻ¼▓óīó═ŌÜż▓Ž┬üĒĪŻ═ŌÜżĘų╚²▓┐ĘųŻ¼▓Ž┬Ēö╔w║¾Ģ■┬Č│÷²X▌åĮMĪŻ
²X▌å╩ŪĮī┘Ą─Ż¼ė├▌S│ą▀BĮėŻ¼ĮYśŗ╔Ž║▄└╬╣╠ĪŻ┐┤ŲüĒ╩Ū4Ön£p╦┘²X▌åŻ¼═┐┴╦║▄ČÓØÖ╗¼ų¼Ż¼┐╔ęįŽļŽ±┴”Šž▀Ć╩ŪąU┤¾Ą─ĪŻ

▓Ž┬ųąķgĄ─═ŌÜż║¾Ż¼Š═┐╔ęį┐┤ĄĮļŖÖC┴╦ĪŻššŲ¼ėęé╚Ą─łAų∙¾wĮī┘▓┐Ęų╩ŪļŖÖCŻ¼ū¾é╚╩Ū┐žųŲŲ„▓┐ĘųĪŻū¾é╚ėąČµÖC▌SŻ¼ę“┤╦┐╔ęį═ŲöÓ═©▀^▀@└’üĒÖz£yą²▐DŪķørĪŻ

«ö▓Ą¶ČµÖC▌S║¾Ż¼┐╔ęį┐┤ĄĮ▌S▒Š╔ĒŠ═╩Ūę╗éĆą²▐Dé„ĖąŲ„ĪŻė├╩ųųĖ▐Däė▀@éĆ▌SŻ¼Å─ą²▐DĮŪČ╚║═ė|Ėą╔Ž┐╔ęį┼ąöÓ│÷Ż¼▀@╩Ūę╗éĆ═©▀^╬’└Ēą²▐DĄ─╗¼äėĮėė|³cüĒ½@Ą├ļŖūĶųĄūā╗»Ą─┐╔š{ļŖūĶŲ„ĪóļŖ╬╗Ų„ĪŻ═©▀^╦³┐╔ęįÖz£yȵÖCĄ─ą²▐D╬╗ų├ĪŻ╣¹šµ║═ĮYśŗłD╩Ūę╗ų┬Ą─ĪŻ

į┌▀@éĆļŖ╬╗Ų„Ą─Ąū▓┐ėąļŖ┬ĘŻ¼═©▀^ūx╚ĪŲõļŖūĶųĄŻ¼▓óīóļŖūĶųĄ┼c▌ö╚ļą┼╠¢▀Mąą▒╚▌^Ż¼╚╗║¾īóŲõ═Żį┌ŲĮ║Ō³c╔ŽŻ¼æ¬įō┐╔ęį╩╣Ųõ░┤╦∙ąĶĮŪČ╚ą²▐DĪŻ
╦∙ęįŻ¼ę╗╣▓ėą╚²éĆę²─_Ż¼ę╗éĆ╩ŪGNDŻ¼ę╗éĆ╩Ūš²ļŖį┤Ż¼ę╗éĆ╩Ūą┼╠¢ŠĆŻ¼┐╔ęįĖ∙ō■GND║═š²ļŖį┤ų«ķgĄ─ļŖē║▓ŅŻ©▒╚ųĄŻ®üĒ┐žųŲĪŻ╩╣ė├▀@ĘNÖCųŲŻ¼╝┤╩╣ė╔ė┌ļŖ│žĀŅæBĄ╚ę“╦žįņ│╔ę╗ą®ļŖē║▓©äėŻ¼ę▓┐╔ęį║┴¤oå¢Ņ}Ąž┐žųŲą²▐DĮŪČ╚ĪŻ
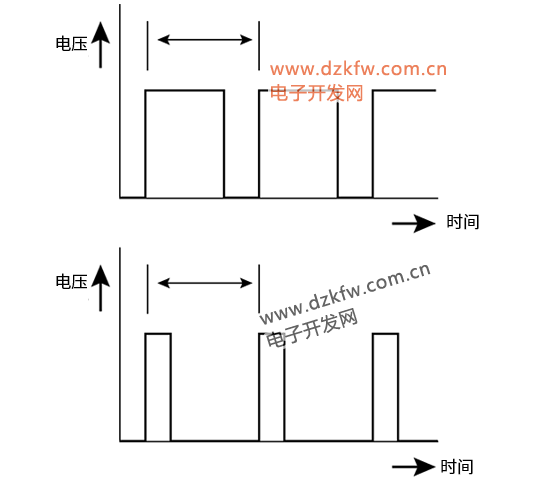
ę¬Å─ArduinoČ╦┐žųŲ╦┼Ę■ļŖÖCĄ─įÆŻ¼ęčĮøėąę╗éĆÄņ┐╔ęįė├Ż¼╬ęĢ■ų▒Įė╩╣ė├▀@éĆÄņŻ¼Ųõ▌ö│÷ą┼╠¢╩ŪPWMĪŻPWM╩Ūį┌ę╗éĆų▄Ų┌ā╚Ė─ūā├}ø_Ą─īÆČ╚Ż¼ūŅĮKęįļŖē║ūā╗»¾w¼F│÷üĒĪŻ
į┌▀@└’Ż¼ūī╬ęŽļŲ┴╦╬ęĄ─═»─Ļ╗žæøĪŻ«öĢrĄ─¤oŠĆļŖ┐žųŲŲ„╩Ūʱčbėą╬ó┐žųŲŲ„Ż┐─ŪĢr║“╩ął÷╔Ž│÷¼FĄ─╩Ūå╬░Õ╬ó┐žųŲŲ„Ą╚▌^┤¾ą═Ą─«aŲĘĪŻ╬ęėøĄ├«öĢr╬ęŽļų¬Ą└┐žųŲŲ„└’├µČ╝ėą╩▓├┤Č°░č╦³▓ķ_┴╦Ż¼Ą½▓╗ėøĄ├└’├µ╩Ūʱėą╬ó┐žųŲŲ„┴╦ĪŻ┐╔─▄╩Ūę“×ķ╦³╩Ū─ŻöMĄ─ĪŻ
╚ń╣¹╩╣ė├Ą─╩ŪPWMŻ¼─Ū├┤æ¬įō╩Ū═©▀^ė▓╝■▀Mąą╠Ä└ĒĄ─░╔ĪŻ╚ń╣¹▀@śėŽļĄ─įÆŻ¼╦┼Ę■ļŖÖC▓╗āH┐╔ęįė├═©▀^PWM▀Mąą┐žųŲŻ¼æ¬įōę▓┐╔ęį═©▀^─ŻöM▀Mąą┐žųŲĪŻ╚ń╣¹░┤ššŪ░├µ╠ߥĮĄ─┐žųŲą┼╠¢╩ŪGND║═š²ļŖį┤ų«ķgĄ─ļŖē║▒╚üĒ┐╝æ]Ą─įÆŻ¼«ö╚╗─ŻöMę▓æ¬įōø]ėąå¢Ņ}Ż¼ę▓Š═╩ŪšfŻ¼╦┼Ę■ļŖÖC▒Š╔Ē║═ęįŪ░Ą──ŻöM▌ö╚ļĢrÄū║§ø]ėą╩▓├┤ūā╗»ĪŻ
ø]ėąūā╗»Ą─¢|╬„ī┘ė┌Ī░└Ž╬’╝■Ī▒Ż¼Ą½▀@└’Ą─Ī░└Ž╬’╝■Ī▒▓╗Ą╚ė┌Ī░ē─¢|╬„Ī▒Ż¼Č°╩ŪĪ░ĘĆČ©Ą─¢|╬„Ī▒Ż¼╦∙ęį╦┼Ę■ļŖÖCį┌╝╝ągĘĮ├µĄ─įuār╩Ū║▄Ė▀Ą─ĪŻ
▓╗▀^Ż¼ė╔ė┌ICę▓į┌╚šęµąĪą═╗»Ż¼╦∙ęį╦┼Ę■ļŖÖCĄ─┐žųŲļŖ┬Ę▓┐Ęųę▓ęčĮøĖ─▀MŻ¼æ¬įō┐╔ęįĖ³▀m«öĄž╠Ä└ĒPWM┴╦ĪŻ
3. ┼cArduino▀BĮė
¼Fį┌Ż¼╬ęéāćLįćīó╦┼Ę■ļŖÖC┼cArduino▀BĮėŲüĒĪŻGNDĪóļŖį┤Īóą┼╠¢Ą─ę²─_┼┼┴ąĢ■ę“╦┼Ę■ļŖÖCČ°«ÉŻ¼╦∙ęįūī╬ęéāüĒ┤_šJę╗Ž┬ĪŻ
▀@┤╬╬ęė├Ą─╩ŪGWSĄ─S03T/2BBMG/FUTABAŻ¼ę▓Š═╩ŪŪ░├µ▓ąČė├Ą──ŪĘNĪŻę²─_┼┼┴ą╚ńŽ┬╦∙╩ŠŻ║

Å─ššŲ¼ū¾é╚ķ_╩╝Ż¼ę²ŠĆę└┤╬╩Ū║┌╔½Īó╝t╔½║═░ū╔½Ż¼╦³éāĘųäe▀BĮėĄĮGNDĪó5VŻ©š²ļŖį┤Ż®║═ą┼╠¢ŠĆĪŻ
┼cArduinoĄ─▀BĮėĘĮĘ©╚ńŽ┬Ż║

╬ę╩╣ė├¼FėąĄ─ÄņćLįćŠÄīæ┴╦╚ńŽ┬▓▌łDŻ║
#include<Servo.h>
Servo myServo;
void setup() {
myServo.attach(9);
}
void loop() {
myServo.write(90);
delay(1000);
myServo.write(45);
delay(1000);
myServo.write(135);
delay(1000);
}
ūx╚Ī╦┼Ę■ļŖÖCĄ─Äņ│╠ą“▓ó▌ö│÷ĄĮę²─_9ĪŻmyServe.writeĄ─└©╠¢└’├µ▒Ē╩ŠĮŪČ╚Ż¼╦∙ęį╬ęīóŲõįOų├×ķ90Č╚╩Ūųąķg╬╗ų├Ż¼▓óęį┤╦×ķ╗∙£╩Ž“ū¾ėęö[äė45Č╚ĪŻÅ─╦┼Ę■ļŖÖCĄ─╣”─▄╔ŽüĒ┐┤Ż¼┐╔ęįęįųąķg╬╗ų├×ķ╗∙£╩Ž“ū¾ėęö[äė90Č╚Ż¼Ą½╚ń╣¹Ė─ūāöĄųĄĢrŽ±Ī░0Ī▒ĪóĪ░180Ī▒─ŪśėĄ─ĮŪČ╚╠½ČÓŻ¼ļŖÖCŠ═Ģ■ŅØČČĪŻ╬ę▓╗ų¬Ą└Š▀¾wįŁę“Ż¼┐╔─▄╩Ūė╔ė┌ą²▐Dé„ĖąŲ„╩Ū─ŻöMĄ─Ż¼╦∙ęįöĄųĄ╔Žėąą®å¢Ņ}ĪŻĶbė┌┤╦Ż¼╬ęøQČ©į┌▓╗╩▄ė░ĒæĄ─ĘČć·ā╚╩╣ė├ĪŻ
╚ń╣¹į┌ȵÖC╔Ž░▓čbę╗éĆōu▒█Ż¼─Ū├┤ö[äėĘ∙Č╚ę▓Ģ■ūā┤¾Ż¼╦∙ęį╬ęį┌▀@éĆōu▒█ĒöČ╦░▓čb┴╦ų«Ū░ūįųŲĄ─ł╠ąąŲ„ĪŻ▀@ĘNł╠ąąŲ„Ą─ÖCųŲ╩ŪīóŲß░³ŠĆ└p└@į┌╬³╣▄╔ŽŻ¼ū÷│╔ŠĆ╚”Ż¼īóßöūė▓Õ╚ļ╬³╣▄ųąŻ¼«öėąļŖ┴„┴„▀^ĢrŻ¼ßöūėŠ═Ģ■ÅŚ╔Ž╚źĪŻę▓Š═╩Ūę╗ĘNūįųŲĄ─┬▌ŠĆ╣▄ĪŻ
×ķ┴╦“īäė▀@éĆł╠ąąŲ„Ż¼╬ę╩╣ė├┴╦ų«Ū░ė├▀^Ą─ROHM╔·«aĄ─Ī░2SD1866Ī▒ĪŻ═©▀^20k”ĖļŖūĶŲ„▀BĮėĄĮĄūū∙▓ó═©▀^ArduinoüĒ┐žųŲON║═OFFĪŻł╠ąąŲ„“īäėė├Ą─═ŌĮėļŖį┤ė╔ā╔╣ØĖ╔ļŖ│žĘųäe╠ß╣®3VļŖĪŻ
¼Fį┌Ż¼┐╔ęįį┌ę╗ą®╠žČ©▓┐╬╗╔Ž▌p▌pŪ├ō¶┴╦ĪŻ
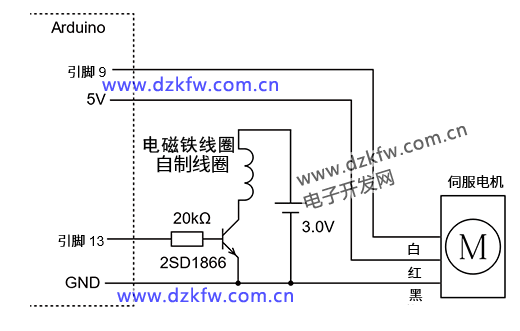
š¹¾wļŖ┬ĘłD╚ń╔ŽłD╦∙╩ŠĪŻ═©▀^ę²─_13“īäėūįųŲł╠ąąŲ„Ż¼═©▀^ę²─_9“īäė╦┼Ę■ļŖÖCĪŻ
═Ō▓┐ļŖ┬Ęų╗ėąė├üĒ“īäėūįųŲł╠ąąŲ„Ą─Š¦¾w╣▄║═ļŖūĶŲ„Ż¼╦∙ęį╬ę░č╦³éāĮMčbį┌ę╗éĆąĪ├µ░³░Õ╔Ž┴╦ĪŻ
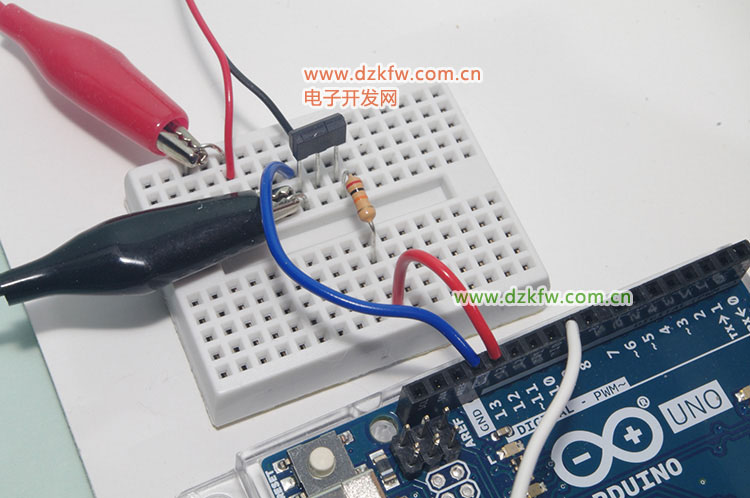
╬ęīó▓▌łD╠Ē╝ėĄĮų«Ū░Ą─▓▌łDųąŻ¼▓ó╠Ē╝ė┴╦ł╠ąąŲ„Ą─╣żū„▓┐ĘųĪŻ╬ęūīßöūėį┌╦┼Ę■ļŖÖCęŲäėĄĮ╠žČ©ĮŪČ╚ĢrÅŚ╔Ž╚źĪŻ
#include<Servo.h>
Servo myServo;
void setup() {
myServo.attach(9);
pinMode(13, OUTPUT);
}
void loop() {
myServo.write(90);
delay(500);
digitalWrite(13, HIGH);
delay(100);
digitalWrite(13, LOW);
delay(1000);
myServo.write(45);
delay(500);
digitalWrite(13, HIGH);
delay(100);
digitalWrite(13, LOW);
delay(1000);
myServo.write(135);
delay(500);
digitalWrite(13, HIGH);
delay(100);
digitalWrite(13, LOW);
delay(1000);
}
į┌īŹļH▓┘ū„ĢrŻ¼▒žĒÜ┐╝æ]ĄĮōu▒█Ą─ęŲäėĢrķgŻ¼╦∙ęįĮŪČ╚įĮ┤¾Ģrķg³cįĮļy░č╬šĪŻ
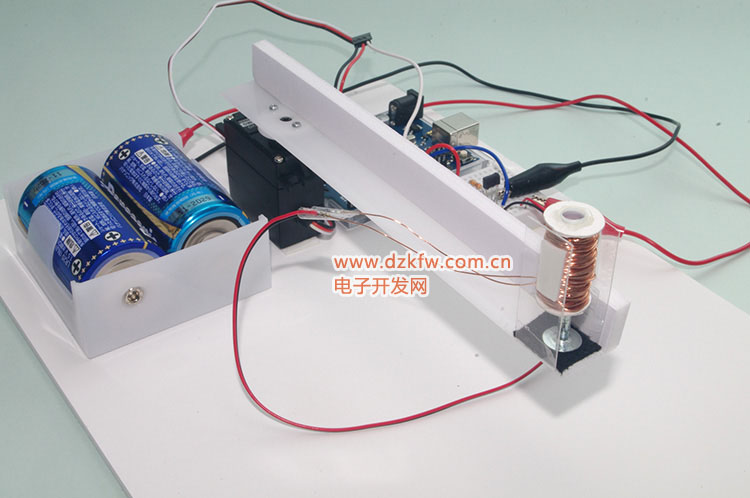
4. ═©▀^Arduino┐žųŲüĒč▌ūÓśĘŲ„ŻĪ
¼Fį┌Ż¼╬ęŽļė├╦³üĒč▌ūÓśĘŲ„ĪŻ╬ęį┌100╚šį¬╔╠ĄĻšęĄĮ┴╦▀@śėĄ─ę╗░čńŖŪ┘Ż¼╬ęøQČ©░č╦³Ė─įņę╗Ž┬ĪŻ

╩ūŽ╚Ż¼╚ĪŽ┬ĶFŲ¼▓óīó╦³éā░▓čbį┌┴Ēę╗éĆ┐“╝▄╔ŽĪŻ


╬ęė├Ž─zŲżĮŅīó▀@ą®ĶFŲ¼╣╠Č©į┌┐“╝▄╔ŽŻ¼▀@śėį┌Ū├ō¶║¾š±äėŠ═▓╗Ģ■═Żų╣ĪŻį┌┐“╝▄Ą─Ž┬ĘĮ░▓čb┴╦Ū░├µū÷Ą─Ħōu▒█Ą─ł╠ąąŲ„ĪŻ═©▀^Arduino═¼Ģr┐žųŲ╦┼Ę■ļŖÖC║═ł╠ąąŲ„ĪŻ
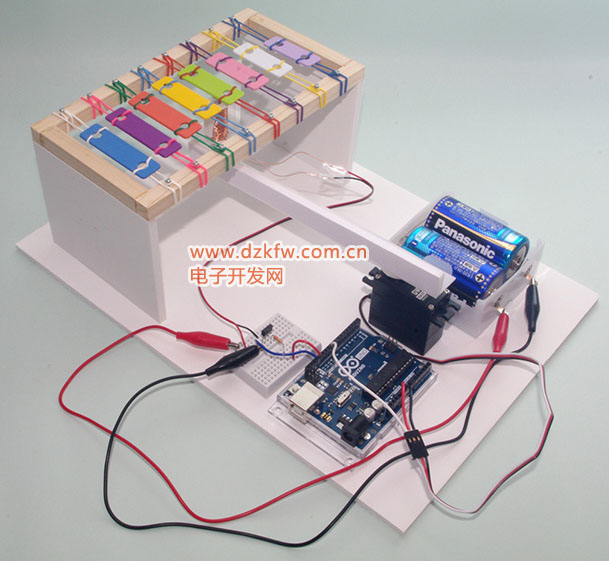
į┌▀@éĆ┐“╝▄ųąŻ¼doĪóreĪómiĪó faĪósolĪólaĪósiĪódoĄ─╬╗ų├Ęųäeī”æ¬122Īó112Īó102Īó95Īó85Īó77Īó67Īó57Ą─ĮŪČ╚Ż¼╬ęūī╦┼Ę■ļŖÖCĖ∙ō■▀@ą®ĮŪČ╚ą²▐D▓óŪ├ō¶ĶFŲ¼ĪŻ
▀@ą®ĮŪČ╚ųĄ╩Ū╬ę═©▀^īŹļHš{š¹Ą├│÷Ą─ĪŻĮėŽ┬üĒŻ¼į§├┤č▌ūÓ─žĪŁĪŁ╬ęĢ║Ģrš{š¹┴╦╬╗ų├Ż¼ćLįćūī╦³č▌ūÓ│÷doĪóreĪómiĪó faĪósolĪólaĪósiĪódoĄ─┬Ģę¶ĪŻ
▀@śėę╗üĒŻ¼╩╣╬ęėą┴╦ūī╦³č▌ūÓę╗╩ūĖĶĄ─┼dų┬ĪŻ
░źčĮŻ¼║├Ž±ÅŚ│÷Ū·š{┴╦Ż¼ų╗╩Ūėą³cŽ±╬ęŻ¼ø]ėą╣ØūÓĖąŻ©ą”Ż®ĪŻų╗ę¬─▄ŽĒ╩▄┬Ģ궊═║├┴╦Ż¼ų¬ūŃ┴╦ŻĪ
▀@ę╗┤╬Ż¼╬ęė├Arduino┐žųŲ╦┼Ę■ļŖÖCćLįć┴╦č▌ūÓśĘŲ„ĪŻį┌▀@éĆ▀B▌dŽĄ┴ąųąŻ¼╬ęéāĮķĮB┴╦╩╣ė├ArduinoüĒ┐žųŲĖ„ĘNįOéõĄ─ę╗ą®ĘĮĘ©ĪŻį§├┤śėŻ┐ėą╩š½@å߯┐
╬ęŽļ─·ęčĮø┴╦ĮŌĄĮ┴╦Ż¼╝┤╩╣╩Ū╔Ē▀ģ╩ņŽżĄ─įOéõŻ¼ę▓┐╔ęįė├Arduino▀Mąą┐žųŲŻ¼ę▓┐╔ęįųŲū„│÷Ė³ėą╚żĄ─ļŖūėū„ŲĘŻĪ┼╬═¹┤¾╝ęę▓Žļ│÷Ė„ĘNäōęŌŻ¼ŽĒ╩▄ļŖūėųŲū„Ą─śĘ╚żŻĪ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū