
arduinošZčį╗∙ĄA(ch©│)
arduino╩Ūė├╩▓├┤šZčįīæĄ─?
Arduino╩╣ė├Ą─ŠÄ│╠šZčįų„ę¬╩Ū╗∙ė┌C++šZčįĄ─ę╗ĘN║å╗»░µ▒ŠŻ¼ĘQ×ķArduinošZčį╗“WiringšZčįĪŻArduinošZčįį┌C++Ą─╗∙ĄA(ch©│)╔Ž▀M(j©¼n)ąą┴╦ę╗ą®║å╗»║═ĘŌčbŻ¼╩╣Ą├ė├æ¶┐╔ęįĖ³╝ė▌p╦╔Ąž▀M(j©¼n)ąąė▓╝■ŠÄ│╠ĪŻArduinošZčįĄ─ŠÄ│╠ĘĮ╩ĮŅÉ╦Ųė┌C++Ż¼░³└©ūā┴┐Īó┐žųŲĮY(ji©”)śŗ(g©░u)Īó║»öĄ(sh©┤)Ą╚╗∙▒ŠšZĘ©Ż¼═¼Ģr▀ĆėąįSČÓÄņ║»öĄ(sh©┤)┐╔ęįĘĮ▒Ńė├æ¶▀M(j©¼n)ąąĖ„ĘN▓┘ū„Ż¼╚ń┐žųŲGPIO┐┌Īóūx╚Īé„ĖąŲ„öĄ(sh©┤)ō■(j©┤)Īó▀M(j©¼n)ąą┤«┐┌═©ėŹĄ╚ĪŻArduinošZčįĄ─┤·┤a┐╔ęįį┌Arduino IDEųąŠÄīæ║═š{(di©żo)įćŻ¼╚╗║¾╔Žé„ĄĮArduino░Õ╔Ž▀\(y©┤n)ąąĪŻ
1Īóarduino│╠ą“┐“╝▄
/*
1Īó┤╦│╠ą“═©▀^░┤µIķ_ĻP(gu©Īn)üĒ┐žųŲLED¤¶Ą─┴┴£ń,«ö(d©Īng)░┤µI░┤Ž┬ĢrLED¤¶³c(di©Żn)┴┴Ż¼╦╔ķ_╩ŪLED¤¶Ž©£ńŻ╗
2ĪóLEDĮė13ę²─_
3Īó░┤µIķ_ĻP(gu©Īn)Įė4ę²─_
*/
#include <stdio.h>
#define LED_PIN 13
#define BUTTON_PIN 4
float temp = 0;
bool button_state = false;
int power = 0;
void setup() {
// put your setup code here, to run once:
pinMode(LED_pin,OUTPUT);
pinMode(BUTTON_pin,INPUT);
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
button_satte = digitalRead(BUTTON_pin);
Serial.println(button_satte);
if (button_satte) {
digitalWrite(LED_pin,HIGH);
}
}
2Īó╗∙▒ŠšZĘ©
2.1 ūóßīĘ¹
//
/ *
*/
2.2 šZŠõĮY(ji©”)╩°Ę¹
;
2.3 ┤·┤aēKĘųĮńĘ¹
{ }
2.4 ║ĻČ©┴xĘ¹
#define
2.5 Ņ^╬─╝■ę²ė├Ę¹
#include
3ĪóöĄ(sh©┤)ō■(j©┤)ŅÉą═
3.1 ╗∙▒ŠöĄ(sh©┤)ō■(j©┤)ŅÉą═
| öĄ(sh©┤)ō■(j©┤)ŅÉą═ | ╚š│ŻīæĘ© | C/C++ųąīæĘ© | C/C++ųąŅÉą═ś╦(bi©Īo)ūRĘ¹ | öĄ(sh©┤)ųĄĘČć· |
|---|---|---|---|---|
| š¹öĄ(sh©┤) | 1,100, | 1,100 | int | -32768~32767 |
| ąĪöĄ(sh©┤) | 3.14,2.7345 | 3.14,2.7345 | float | -3.4028235E+38~3.4028235E+38 |
| ūųĘ¹ | a,b,╬ę | 'a','b','╬ę' | char | -128~127 |
| ╬─▒Š | ė÷ęŖ─ŃšµĖ▀┼d! | Ī░ė÷ęŖ─ŃšµĖ▀┼d!Ī▒ | string | |
| ▀ē▌ŗ┼ąöÓ | ī”ĪóÕe | true,false | bool | true,false |
3.2 ╗∙▒ŠöĄ(sh©┤)ō■(j©┤)ŅÉą═▐D(zhu©Żn)ōQ║»öĄ(sh©┤)
char(value)
int(value)
float(value)
String(value)
itoa(int value,char*string,int radix)
atoi(const char *nptr)
3.3 š¹ą═öĄ(sh©┤)▓╗═¼▀M(j©¼n)ųŲ▒Ē╩Š
š¹öĄ(sh©┤)│Ż┴┐─¼šJ(r©©n)×ķ╩«▀M(j©¼n)ųŲŻ¼Ą½į┌Ū░├µ╝ė╔Ž╠ž╩ŌŪ░ŠY▒Ē╩Š×ķŲõ╦¹▀M(j©¼n)ųŲöĄ(sh©┤)ĪŻ
| ▀M(j©¼n)ųŲ | └²ūė | Ė±╩Į | éõūó |
|---|---|---|---|
| ╩«▀M(j©¼n)ųŲ | 123 | ¤o | ¤o |
| Č■▀M(j©¼n)ųŲ | 0b1111011 | Ū░ŠY0b╗“0B | ų╗▀mė├ė┌8╬╗Ą─ųĄŻ©0ĄĮ255Ż®ūųĘ¹0-1ėąą¦ |
| ░╦▀M(j©¼n)ųŲ | 0173 | Ū░ŠY0 | ūųĘ¹0-7ėąą¦ |
| ╩«┴∙▀M(j©¼n)ųŲ | 0x7B | Ū░ŠY0x╗“0X | ūųĘ¹0-9Ż¼A-FŻ¼A-Fėąą¦ |
3.4 öĄ(sh©┤)ĮM array
öĄ(sh©┤)ĮM╩ŪŽÓ═¼ŅÉą═Ą─öĄ(sh©┤)ō■(j©┤)ĮM│╔Ą─╝»║ŽŻ¼öĄ(sh©┤)ĮMųąĄ─├┐éĆį¬╦žČ╝▒╗─¼šJ(r©©n)Ęų┼õę╗éĆ╦„ę²Ż©Ž┬ś╦(bi©Īo)Ż®Ż¼╬ęéā┐╔ęį═©▀^öĄ(sh©┤)ĮM├¹[ ╦„ę² ]Ą─ĘĮ╩ĮįLå¢öĄ(sh©┤)ĮMųąĄ─į¬╦žĪŻ
äō(chu©żng)Į©öĄ(sh©┤)ĮM
šZĘ©Ė±╩ĮŻ║
datatype arrayname[ öĄ(sh©┤)ĮMį¬╦žéĆöĄ(sh©┤)];
int Ints[6];
int P[] = {2, 4, 8, 3, 6};
int SensVals[6] = {2, 4, -8, 3, 2};
char message[6] = "hello";
datatype:┬Ģ├„öĄ(sh©┤)ĮMųą┤µĘ┼į¬╦žĄ─öĄ(sh©┤)ō■(j©┤)ŅÉą═Ż╗
arraynameŻ║öĄ(sh©┤)ĮM├¹ĘQŻ¼Ž±Įoūā┴┐├³├¹ę╗śėĮoöĄ(sh©┤)ĮMŲę╗éĆ├¹ūųŻ╗
öĄ(sh©┤)ĮM│§╩╝╗»
╬ęéā┐╔ęįį┌Č©┴xöĄ(sh©┤)ĮMĄ─═¼Ģr▀M(j©¼n)ąą│§╩╝╗»Ż¼╝┤ĮoöĄ(sh©┤)ĮM┘xųĄŻ║
int a[4] = {20, 345, 700, 22};
{ }ųąĄ─ųĄ╝┤×ķĖ„į¬╦žĄ─│§ųĄŻ¼Ė„ųĄų«ķgė├,Ż©Č║╠¢Ż®Ė¶ķ_ĪŻ
öĄ(sh©┤)ĮM┘x│§ųĄąĶę¬ūóęŌęįŽ┬Äū³c(di©Żn)Ż║
1) ┐╔ęįų╗Įo▓┐Ęųį¬╦ž┘x│§ųĄĪŻ«ö(d©Īng){ }ųąųĄĄ─éĆöĄ(sh©┤)╔┘ė┌į¬╦žéĆöĄ(sh©┤)ĢrŻ¼ų╗ĮoŪ░├µ▓┐Ęųį¬╦ž┘xųĄĪŻ└²╚ńŻ║
int a[10]={12, 19, 22 , 993, 344};
▒Ē╩Šų╗Įo a[0] ~ a[4] ▀@5éĆį¬╦ž┘xųĄŻ¼Č°║¾├µ5éĆį¬╦žūįäė┘x0ųĄĪŻ
«ö(d©Īng)┘xųĄĄ─į¬╦ž╔┘ė┌öĄ(sh©┤)ĮM┐é¾wį¬╦žĄ─Ģr║“Ż¼╩ŻėÓĄ─į¬╦žūįäė│§╩╝╗»×ķ 0Ż║ī”ė┌intŅÉą═öĄ(sh©┤)ō■(j©┤)Ż¼Š═╩Ūš¹öĄ(sh©┤)0Ż╗ī”ė┌charŅÉą═öĄ(sh©┤)ō■(j©┤)Ż¼Š═╩ŪūųĘ¹ Ī«\0Ī»Ż©┐šūųĘ¹Ż®Ż╗ī”ė┌floatŅÉą═öĄ(sh©┤)ō■(j©┤)Ż¼Š═╩ŪąĪöĄ(sh©┤)0.0ĪŻ
╬ęéā┐╔ęį═©▀^Ž┬├µĄ─ą╬╩ĮīóöĄ(sh©┤)ĮMĄ─╦∙ėąį¬╦ž│§╩╝╗»×ķ 0Ż║
int a[10] = {0}; char c[10] = {0}; float f[10] = {0};
ė╔ė┌╩ŻėÓĄ─į¬╦žĢ■ūįäė│§╩╝╗»×ķ0Ż¼╦∙ęįų╗ąĶę¬ĮoĄ┌0éĆį¬╦ž┘x0ųĄ╝┤┐╔ĪŻ
╩╣ė├öĄ(sh©┤)ĮM
öĄ(sh©┤)ĮMųąĄ─├┐éĆį¬╦žČ╝ėąę╗éĆą“╠¢Ż¼▀@éĆą“╠¢Å─0ķ_╩╝Ż¼Č°▓╗╩ŪÅ─╬ęéā╩ņŽżĄ─1ķ_╩╝Ż¼ĘQ×ķŽ┬ś╦(bi©Īo)Ż©IndexŻ®ĪŻ╩╣ė├öĄ(sh©┤)ĮMį¬╦žĢrŻ¼ųĖ├„Ž┬ś╦(bi©Īo)╝┤┐╔Ż¼ą╬╩Į×ķŻ║
arrayName[index]
arrayName ×ķöĄ(sh©┤)ĮM├¹ĘQŻ¼index ×ķŽ┬ś╦(bi©Īo)ĪŻ└²╚ńŻ¼a[0] ▒Ē╩ŠĄ┌0éĆį¬╦žŻ¼a[3] ▒Ē╩ŠĄ┌3éĆį¬╦ž
īŹ└²Ż║
void setup() {
Serial.begin(9600);
int a[6] = {299, 34, 92, 100}; // Č©┴xöĄ(sh©┤)ĮM
for(int i=0; i<6; i++){ //┤«┐┌▒O(ji©Īn)ęĢŲ„▌ö│÷öĄ(sh©┤)ĮMį¬╦ž
Serial.print("a[");
Serial.print(i);
Serial.print("] =");
Serial.println(a[i]);
Serial.println("");
}
}
void loop() {
while(1){continue;}
}
╬ęéā▀Ć┐╔ęįĖ∙ō■(j©┤)ąĶę¬Č©┴xČ■ŠSĪó╚²ŠSĄ╚ČÓŠSöĄ(sh©┤)ĮMŻ¼┤╦╠Ä║÷┬įĪŻ
4Īóūā┴┐
4.1 ╩▓├┤╩Ūūā┴┐
öĄ(sh©┤)īW(xu©”)šnųą╬ęéā╩Ū▓╗╩Ū▀@śėīæ ķL = 10Ż¼īÆ = 5Ż¼
į┌│╠ą“ųą╬ęéāę▓Įø(j©®ng)│ŻąĶę¬ė├ę╗éĆ├¹ĘQüĒ┤·▒Ē─│éĆöĄ(sh©┤)ō■(j©┤)Ż¼
╚ń length = 10Ż¼width = 5, ▀@└’Ą─lengthĪówidthŠ═╩Ūūā┴┐,╬ęéā░čöĄ(sh©┤)ō■(j©┤)Ę┼ĄĮūā┴┐ųąŻ¼║¾├µę¬ė├ĄĮ▀@éĆöĄ(sh©┤)ō■(j©┤)Ģr╬ęéāų▒Įėė├ūā┴┐├¹Š═┐╔ęį┴╦ĪŻ
4.2 ūā┴┐Ą─ū„ė├
ūā┴┐╩Ūė├üĒ┤µā”│╠ą“▀\(y©┤n)ąą▀^│╠ųąė├ĄĮĄ─öĄ(sh©┤)ō■(j©┤)Ż¼╩╣ė├ūā┴┐┐╔ęįį÷╝ė│╠ą“Ą─║åØŹąįĪóęūūxąį║═ęūŠSūo(h©┤)ąįĪŻ
4.3 ūā┴┐Ą─Č©┴x║═æ¬(y©®ng)ė├
Č©┴xūā┴┐šZĘ©Ė±╩Į
ūā┴┐╩Ūė├üĒ┤µā”öĄ(sh©┤)ō■(j©┤)Ą─Ż¼öĄ(sh©┤)ō■(j©┤)ėąš¹ą═ĪóąĪöĄ(sh©┤)Īó╬─▒ŠĄ╚ČÓĘNŅÉą═Ż¼ę“┤╦į┌C/C++ųąČ©┴xūā┴┐▒žĒÜŽ╚┬Ģ├„ūā┴┐ŅÉą═Ż¼ūā┴┐Č©┴xšZĘ©╚ńŽ┬Ż║
int length,width;
float square;
char ch;
string name ="arduino"
c/c++ųąūā┴┐Ą─ųĄ┐╔ęįūā╗»Ż¼Ą½ūā┴┐Ą─ŅÉą═▓╗─▄ūā╗»ĪŻ
ūā┴┐Ą─æ¬(y©®ng)ė├
Č©┴x═Ļūā┴┐Ż¼╬ęéāį┌┤·┤aųąŠ═┐╔ęįī”ūā┴┐▀M(j©¼n)ąą┘xųĄĪóę²ė├
length =10;
width = 5;
square = length * width
printf(square)
ūā┴┐├³├¹ęÄ(gu©®)ätŻ║
ūā┴┐├¹┐╔ęį╩Ūūų─ĖĪóöĄ(sh©┤)ūų║═Ž┬äØŠĆĄ─ĮM║ŽŻ¼Ą½▒žĒÜū±╩žęįŽ┬ęÄ(gu©®)ätŻ║
1Īóūā┴┐├¹▒žĒÜęįūų─Ė╗“Ž┬äØŠĆķ_Ņ^Ż¼▓╗─▄╩ŪöĄ(sh©┤)ūų;
2Īóūā┴┐├¹ųąĄ─ūų─Ė╩Ūģ^(q©▒)Ęų┤¾ąĪīæĄ─ĪŻ▒╚╚ń a ║═ A ╩Ū▓╗═¼Ą─ūā┴┐├¹Ż¼num ║═ Num ę▓╩Ū▓╗═¼Ą─ūā┴┐├¹ĪŻ
3Īóūā┴┐├¹▓╗─▄╩ŪĻP(gu©Īn)µIūų;
ūā┴┐├³├¹ęÄ(gu©®)ĘČĮ©ūhŻ║
1ĪóęŖ├¹ų¬┴xŻ╗
2ĪóąĪ±äĘÕĖ±╩ĮŻ╗
3ĪóŽ┬äØŠĆĘųČ╬Ė±╩ĮŻ╗
5ĪóöĄ(sh©┤)ō■(j©┤)▀\(y©┤n)╦ŃĘ¹
5.1 ╦Ńąg(sh©┤)▀\(y©┤n)╦ŃĘ¹
╝ė +
£p -
│╦ *
│² / ūóęŌŻ║▒╗│²öĄ(sh©┤)║═│²öĄ(sh©┤)Č╝×ķš¹öĄ(sh©┤)Ż¼ĮY(ji©”)╣¹ų╗▒Ż┴¶š¹öĄ(sh©┤)Ż¼╔ß╚źąĪöĄ(sh©┤)▓┐ĘųŻ¼ŽļĄ├ĄĮąĪöĄ(sh©┤)ąĶ░č▒╗│²öĄ(sh©┤)╗“│²öĄ(sh©┤)╚╬ęŌę╗éĆ▐D(zhu©Żn)ōQ×ķąĪöĄ(sh©┤)
╚ĪėÓ %
ūįį÷ ++
ūį£p --
5.2 ┘xųĄĘ¹
=
Å═(f©┤)║Ž┘xųĄ▀\(y©┤n)╦ŃĘ¹
+=
-=
*=
/=
%=
5.3 ĻP(gu©Īn)ŽĄ▀\(y©┤n)╦ŃĘ¹
Ą╚ė┌ ==
▓╗Ą╚ė┌ !=
┤¾ė┌ >
ąĪė┌ <
┤¾ė┌Ą╚ė┌ >=
ąĪė┌Ą╚ė┌ <=
5.4 ▀ē▌ŗ▀\(y©┤n)╦ŃĘ¹Ż©▓╝Ā¢▀\(y©┤n)╦ŃĘ¹Ż®
▀ē▌ŗ┼c &&
▀ē▌ŗ╗“ ||
▀ē▌ŗĘŪ ŻĪ
5.5 ╬╗▀\(y©┤n)╦ŃĘ¹
╬╗┼c &
╬╗╗“ |
╬╗«É╗“ ^
╬╗ĘŪ ~
ū¾ęŲ <<
ėęęŲ >>
6Īó│╠ą“╚²┤¾┴„│╠┐žųŲ
6.1 Ēśą“ĮY(ji©”)śŗ(g©░u)
6.2 Ęųų¦ĮY(ji©”)śŗ(g©░u)Ż©▀xō±ĮY(ji©”)śŗ(g©░u)Ż®
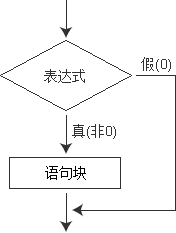
if šZŠõ Ż©å╬Ęųų¦ĮY(ji©”)śŗ(g©░u)Ż®
═©▀^ if šZŠõŻ¼┐╔ęįūī│╠ą“┼ąöÓ─│ę╗éĆŚl╝■╩Ūʱ▀_(d©ó)ĄĮŻ¼▓óŪęĖ∙ō■(j©┤)┼ąöÓĮY(ji©”)╣¹ł╠(zh©¬)ąąŽÓæ¬(y©®ng)Ą─│╠ą“ĪŻ
ifšZŠõšZĘ©Ė±╩ĮŻ║
if(┼ąöÓŚl╝■) {
šZŠõēK
}
┤·┤ał╠(zh©¬)ąą▀ē▌ŗŻ║
╚ń╣¹ Ī░┼ąöÓŚl╝■Ī▒ ×ķšµätł╠(zh©¬)ąąšZŠõēKŻ¼Ę±ätīó▓╗ł╠(zh©¬)ąąįōšZŠõēKŻ¼ifšZŠõ┴„│╠łDŻ║
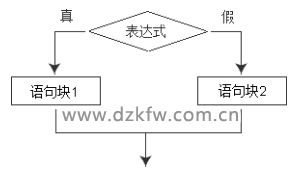
if ...else šZŠõ Ż©ļpĘųų¦ĮY(ji©”)śŗ(g©░u)Ż®
šZĘ©Ė±╩ĮŻ║
if( ┼ąöÓŚl╝■ ) {
šZŠõēK1
}
else {
šZŠõēK2
}
┤·┤ał╠(zh©¬)ąą▀ē▌ŗŻ║
╚ń╣¹ Ī░┼ąöÓŚl╝■Ī▒ ×ķšµätł╠(zh©¬)ąąĪ▒šZŠõēK1ĪÕĪŻ×ķ╝┘īół╠(zh©¬)ąąĪ▒šZŠõēK2ĪÕŻ¼if...elsešZŠõ┴„│╠łDŻ║
īŹ└²Ż║
void setup() {
Serial.begin(9600); //ķ_╩╝┤«┐┌═©ėŹ
pinMode(2, INPUT_PULLUP); //īóę²─_2įO(sh©©)ų├×ķ▌ö╚ļ╔Ž└Ł─Ż╩Į
pinMode(13, OUTPUT);
}
void loop() {
int sensorVal = digitalRead(2); //īóķ_ĻP(gu©Īn)ĀŅæB(t©żi)öĄ(sh©┤)ųĄūx╚ĪĄĮūā┴┐ųą
Serial.println(sensorVal); //▌ö│÷ķ_ĻP(gu©Īn)ĀŅæB(t©żi)öĄ(sh©┤)ųĄ
//░┤Ōo▒╗░┤Ž┬║¾Ż¼ę²─_13▀BĮėĄ─LEDīó▒╗³c(di©Żn)┴┴ĪŻ░┤Ōoø]ėą░┤Ž┬ĢrŻ¼LEDŽ©£ńĪŻ
//╚ń╣¹░┤Ōoø]ėą░┤Ž┬Ż¼Ž©£ńLEDĪŻĘ±ätŻ¼³c(di©Żn)┴┴LED
if (sensorVal == HIGH) { //░┤Ōoø]ėą░┤Ž┬
digitalWrite(13, LOW); //Ž©£ńLED
} else { //ʱät
digitalWrite(13, HIGH); //³c(di©Żn)┴┴LED
}
}
ČÓéĆif ...else šZŠõ Ż©ČÓĘųų¦ĮY(ji©”)śŗ(g©░u)Ż®
šZĘ©Ė±╩ĮŻ║
if(┼ąöÓŚl╝■1){
šZŠõēK1
} else if(┼ąöÓŚl╝■2){
šZŠõēK2
}else if(┼ąöÓŚl╝■3){
šZŠõēK3
}else if(┼ąöÓŚl╝■m){
šZŠõēKm
}else{
šZŠõēKn
}
┤·┤ał╠(zh©¬)ąą▀ē▌ŗŻ║
Å─╔ŽĄĮŽ┬ę└┤╬Öz£y┼ąöÓŚl╝■Ż¼«ö(d©Īng)─│éĆ┼ąöÓŚl╝■│╔┴óĢrŻ¼ätł╠(zh©¬)ąąŲõī”æ¬(y©®ng)Ą─šZŠõēKĪŻ╚ń╣¹╦∙ėą┼ąöÓŚl╝■Č╝▓╗│╔┴óŻ¼ätł╠(zh©¬)ąąšZŠõēKnĪŻ
switch casešZŠõ
switchšZŠõ═©▀^ī”ę╗éĆūā┴┐Ą─ųĄ┼ccasešZŠõųąųĖČ©Ą─ųĄ▀M(j©¼n)ąą▒╚▌^ĪŻ«ö(d©Īng)ę╗éĆcasešZŠõųąĄ─ųĖČ©ųĄ┼cswitchšZŠõųąĄ─ūā┴┐ŽÓŲź┼õŻ¼Š═Ģ■▀\(y©┤n)ąą▀@éĆcasešZŠõŽ┬Ą─┤·┤aĪŻ═©▀^switch casešZŠõŻ¼īŹ¼F(xi©żn)ČÓĘųų¦╣”─▄ĪŻ
šZĘ©Ė±╩ĮŻ║
switch (var) {
case 1:
//«ö(d©Īng)varĄ╚ė┌1Ģrł╠(zh©¬)ąą▀@└’Ą─│╠ą“
┤·┤aēK1
break;
case 2:
┤·┤aēK2
//«ö(d©Īng)varĄ╚ė┌2Ģrł╠(zh©¬)ąą▀@└’Ą─│╠ą“
break;
default:
// ╚ń╣¹varĄ─ųĄ┼cęį╔ŽcaseųąĄ─ųĄČ╝▓╗Ųź┼õ
// ätł╠(zh©¬)ąą▀@└’Ą─│╠ą“
┤·┤aēK3
break;
}
switch casešZŠõ╩╣ė├ūóęŌ╩┬ĒŚŻ║
1) «ö(d©Īng)ūā┴┐var║═─│éĆcase║¾├µĄ─öĄ(sh©┤)ųĄŲź┼õ│╔╣”║¾Ż¼╚ń╣¹ø]ėąbreak, │╠ą“Ģ■ł╠(zh©¬)ąąįōĘųų¦ęį╝░║¾├µ╦∙ėąĘųų¦Ą─šZŠõĪŻ
2) case ║¾├µ▒žĒÜ╩Ūę╗éĆš¹öĄ(sh©┤)Ż¼╗“š▀╩ŪĮY(ji©”)╣¹×ķš¹öĄ(sh©┤)Ą─▒Ē▀_(d©ó)╩ĮŻ¼Ą½▓╗─▄░³║¼╚╬║╬ūā┴┐ĪŻ
3) case ║¾├µ▓╗─▄╩╣ė├ūųĘ¹┤«Ż¼Ą½┐╔ęį╩╣ė├ūųĘ¹Ż¼╩╣ė├ūųĘ¹ĢrąĶę¬ė├å╬ę²╠¢░čūųĘ¹└©ŲüĒŻ¼╚ń: case: 'b'ĪŻ
4) default ▓╗╩Ū▒žĒÜĄ─ĪŻ«ö(d©Īng)ø]ėą default ĢrŻ¼╚ń╣¹╦∙ėą case Č╝Ųź┼õ╩¦öĪŻ¼─Ū├┤Š═╩▓├┤Č╝▓╗ł╠(zh©¬)ąąĪŻ
īŹ└²
void setup() {
Serial.begin(9600); // │§╩╝╗»┤«┐┌═©ėŹ
for (int thisPin = 2; thisPin < 7; thisPin++) {// │§╩╝╗»Arduino▀BĮėLEDĄ─ę²─_
pinMode(thisPin, OUTPUT);
}
}
void loop() {
if (Serial.available() > 0) {
int inByte = Serial.read();
// Arduinoė├switchšZŠõŻ¼Ė∙ō■(j©┤)Įė╩šĄĮĄ─▓╗═¼ą┼Žó▀M(j©¼n)ąąŽÓæ¬(y©®ng)Ą─Ę┤æ¬(y©®ng)ĪŻ
switch (inByte) {
case 'a':
digitalWrite(2, HIGH);
break;
case 'b':
digitalWrite(3, HIGH);
break;
case 'c':
digitalWrite(4, HIGH);
break;
case 'd':
digitalWrite(5, HIGH);
break;
case 'e':
digitalWrite(6, HIGH);
break;
default:
// Ž©£ń╦∙ėąLED:
for (int thisPin = 2; thisPin < 7; thisPin++) {
digitalWrite(thisPin, LOW);
}
break;
}
}
}
6.3 裣h(hu©ón)ĮY(ji©”)śŗ(g©░u)
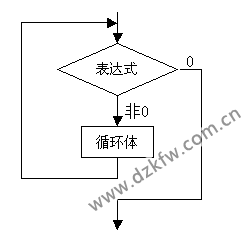
while 裣h(hu©ón)šZŠõ
šZĘ©Ė±╩ĮŻ║
while(▒Ē▀_(d©ó)╩Į){
裣h(hu©ón)¾w
}
while裣h(hu©ón)ł╠(zh©¬)ąą▀ē▌ŗŻ║Ž╚ėŗ╦Ń▒Ē▀_(d©ó)╩ĮĄ─ųĄŻ¼«ö(d©Īng)ųĄ×ķšµŻ©ĘŪ0Ż®ĢrŻ¼ ł╠(zh©¬)ąąčŁŁh(hu©ón)¾wšZŠõŻ╗ł╠(zh©¬)ąą═Ļ裣h(hu©ón)¾wšZŠõŻ¼į┘┤╬ėŗ╦Ń▒Ē▀_(d©ó)╩ĮĄ─ųĄŻ¼╚ń╣¹×ķšµŻ¼└^└m(x©┤)ł╠(zh©¬)ąąčŁŁh(hu©ón)¾wĪŁĪŁ▀@éĆ▀^│╠Ģ■ę╗ų▒ųžÅ═(f©┤)Ż¼ų▒ĄĮ▒Ē▀_(d©ó)╩ĮĄ─ųĄ×ķ╝┘Ż©0Ż®▓┼═╦│÷裣h(hu©ón)ĪŻ┴„│╠łDŻ║
īŹ└²Ż║
void setup() {
// │§╩╝╗»┤«┐┌═©ėŹ
Serial.begin(9600);
}
void loop() {
int i=1, sum=0;
while(i<=100){ //┼ąöÓi╩ŪʱąĪė┌Ą╚ė┌┴Ń
sum+=i; //«ö(d©Īng)iąĪė┌Ą╚ė┌┴ŃĢrŻ¼
i++; //ł╠(zh©¬)ąąčŁŁh(hu©ón)¾wųąĄ─šZŠõĪŻ
}
Serial.print ("sum = "); //═©▀^┤«┐┌▒O(ji©Īn)ęĢŲ„▌ö│÷
Serial.println (sum); //while裣h(hu©ón)ĮY(ji©”)╩°║¾Ą─sumųĄ
delay (5000); // čė▀t5├ļńŖ
}
do while裣h(hu©ón)šZŠõ
šZĘ©Ė±╩ĮŻ║
do{
┤·┤aēKšZŠõ
} while(▒Ē▀_(d©ó)╩Į);
│╠ą“ł╠(zh©¬)ąą▀ē▌ŗŻ║Ž╚ł╠(zh©¬)ąąčŁŁh(hu©ón)¾w┤·┤aēKšZŠõŻ¼╚╗║¾į┘┼ąöÓ▒Ē▀_(d©ó)╩Į╩Ūʱ×ķšµŻ¼╚ń╣¹×ķšµät└^└m(x©┤)裣h(hu©ón)Ż╗╚ń╣¹×ķ╝┘Ż¼ätĮKų╣裣h(hu©ón)ĪŻę“┤╦Ż¼do-while 裣h(hu©ón)ų┴╔┘ꬳ╠(zh©¬)ąąę╗┤╬裣h(hu©ón)¾wĪŻ
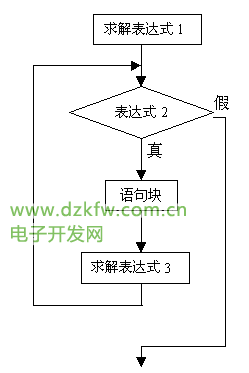
for 裣h(hu©ón)
šZĘ©Ė±╩ĮŻ║
for(▒Ē▀_(d©ó)╩Į1; ▒Ē▀_(d©ó)╩Į2; ▒Ē▀_(d©ó)╩Į3){
šZŠõēK
}
for裣h(hu©ón)Ą─ł╠(zh©¬)ąą▀^│╠╚ńŽ┬Ż║
1) Ž╚ł╠(zh©¬)ąą▒Ē▀_(d©ó)╩Į1ĪŻ
2) į┘ł╠(zh©¬)ąą▒Ē▀_(d©ó)╩Į2Ż¼╚¶ŲõųĄ×ķšµŻ©ĘŪ0Ż®Ż¼ätł╠(zh©¬)ąą└©╠¢ųąĄ─šZŠõēKŻ¼Ę±ätīóĮY(ji©”)╩°čŁŁh(hu©ón)ĪŻ
3) ł╠(zh©¬)ąą═Ļ裣h(hu©ón)¾wųąĄ─šZŠõēKŻ¼į┘ł╠(zh©¬)ąą▒Ē▀_(d©ó)╩Į3ĪŻ
4) ųžÅ═(f©┤)ł╠(zh©¬)ąą▓Į¾E 2) ║═ 3)Ż¼ų▒ĄĮĪ░▒Ē▀_(d©ó)╩Į2Ī▒Ą─ųĄ×ķ╝┘Ż¼Š═ĮY(ji©”)╩°čŁŁh(hu©ón)ĪŻ
ūóęŌŻ║▒Ē▀_(d©ó)╩Į1āHį┌Ą┌ę╗┤╬裣h(hu©ón)Ģrł╠(zh©¬)ąąŻ¼ęį║¾Č╝▓╗Ģ■į┘ł╠(zh©¬)ąąŻ¼┐╔ęįšJ(r©©n)×ķ▀@╩Ūę╗éĆ│§╩╝╗»šZŠõĪŻ
void setup(){
int i, sum=0;
for(i=1; i<=100; i++){
sum = sum + i;
}
}
void loop(){
}
╩╣ė├foršZŠõæ¬(y©®ng)įōūóęŌ
1) for裣h(hu©ón)ųąĄ─Ī░▒Ē▀_(d©ó)╩Į1Ż©čŁŁh(hu©ón)ūā┴┐┘x│§ųĄŻ®Ī▒ĪóĪ░▒Ē▀_(d©ó)╩Į2(裣h(hu©ón)Śl╝■)Ī▒║═Ī░▒Ē▀_(d©ó)╩Į3Ż©čŁŁh(hu©ón)ūā┴┐į÷┴┐Ż®Ī▒Č╝╩Ū▀xō±ĒŚŻ¼╝┤┐╔ęį╚▒╩ĪŻ¼Ą½Ęų╠¢(;)▓╗─▄╚▒╩ĪĪŻ
2) ╩Ī┬į┴╦Ī░▒Ē▀_(d©ó)╩Į1Ż©čŁŁh(hu©ón)ūā┴┐┘x│§ųĄŻ®Ī▒Ż¼▒Ē╩Š▓╗ī”裣h(hu©ón)┐žųŲūā┴┐┘x│§ųĄĪŻ
3) ╩Ī┬į┴╦Ī░▒Ē▀_(d©ó)╩Į2(裣h(hu©ón)Śl╝■)Ī▒Ż¼╚ń╣¹▓╗ū÷Ųõ╦³╠Ä└ĒŠ═Ģ■│╔×ķ╦└裣h(hu©ón)ĪŻ
4) ╩Ī┬į┴╦Ī░▒Ē▀_(d©ó)╩Į3(裣h(hu©ón)ūā┴┐į÷┴┐)Ī▒Ż¼ät▓╗ī”裣h(hu©ón)┐žųŲūā┴┐▀M(j©¼n)ąą▓┘ū„Ż¼▀@Ģr┐╔į┌šZŠõ¾wųą╝ė╚ļą▐Ė─裣h(hu©ón)┐žųŲūā┴┐Ą─šZŠõĪŻ╚ńęįŽ┬╩Š└²Ż║
for( i=1; i<=100; ){
sum=sum+i;
i++;
}
cšZčįųąŻ¼for 裣h(hu©ón)╩╣ė├Ė³╝ėņ`╗ŅŻ¼═Ļ╚½┐╔ęį╚Ī┤· while 裣h(hu©ón)
īŹ└²Ż║
int PWMpin = 9; //ę²─_9═©▀^Ž▐┴„ļŖūĶ▀BĮėLED
void setup() {
}
void loop() {
for (int i=0; i <= 255; i++){ //ķ_╩╝▀\(y©┤n)ąąfor裣h(hu©ón)šZŠõ
analogWrite(PWMpin, i); //ī”ę²─_9īæ╚ļiĄ─öĄ(sh©┤)ųĄ
delay(10); //čė▀t10║┴├ļ
}
}
breakšZŠõ
breakšZŠõė├ė┌└@▀^š²│ŻčŁŁh(hu©ón)Śl╝■▓óųąų╣doŻ¼forŻ¼╗“while裣h(hu©ón)Ż¼ę▓┐╔ė├ė┌ųąų╣switchšZŠõĪŻ
└²╚ńŻ║
void setup() {
// │§╩╝╗»┤«┐┌═©ėŹ
Serial.begin(9600);
}
void loop() {
int i; int sum = 0;
while(1){ //裣h(hu©ón)Śl╝■×ķ╦└裣h(hu©ón)
sum+=i;
i++;
if(i>100){
break;
}
}
Serial.print ("sum = "); //═©▀^┤«┐┌▒O(ji©Īn)ęĢŲ„▌ö│÷
Serial.println (sum); //do-while裣h(hu©ón)ĮY(ji©”)╩°║¾Ą─sumųĄ
delay (5000); // čė▀t5├ļńŖ
}
continuešZŠõ
continuešZŠõĄ─ū„ė├╩Ū╠°▀^裣h(hu©ón)¾wųą╩ŻėÓĄ─šZŠõČ°ÅŖ(qi©óng)ųŲ▀M(j©¼n)╚ļŽ┬ę╗┤╬裣h(hu©ón)ĪŻcontinuešZŠõė├ė┌ whileĪófor 裣h(hu©ón)ųąŻ¼│Ż┼c if Śl╝■šZŠõę╗Ų╩╣ė├Ż¼┼ąöÓŚl╝■╩Ūʱ│╔┴óĪŻ
void setup() {
pinMode (3, OUTPUT);
}
void loop() {
for (int x = 0; x < 255; x ++)
{
if (x > 40 && x < 120){ // «ö(d©Īng)x┤¾ė┌40╗“ąĪė┌120
continue; // ╠°▀^┤╦┤╬裣h(hu©ón)
}
analogWrite(3, x);
}
}
return
7Īó║»öĄ(sh©┤)
7.1 ╩▓├┤╩Ū║»öĄ(sh©┤)
ĘŌčbį┌ę╗ŲŻ¼īŹ¼F(xi©żn)ę╗Č©╣”─▄Ą─┤·┤aŠ═╩Ū║»öĄ(sh©┤)ĪŻ║»öĄ(sh©┤)Ą─╩╣ė├┐╔ęį╩╣│╠ą“─ŻēK╗»Ż¼į÷╝ė┤·┤aĄ─Å═(f©┤)ė├Č╚ĪŻ
void delay(int ms)
{
int start = micros();
while (ms > 0) {
yield();
while ( ms > 0 && (micros() - start) >= 1000) {
ms--;
start += 1000;
}
}
}
7.2 ║»öĄ(sh©┤)Ą─Č©┴x
dataType functionName( dataType1 param1, dataType2 param2 ... ){
//body
}
- dataType ╩ŪĘĄ╗žųĄŅÉą═Ż¼╦³┐╔ęį╩ŪCšZčįųąĄ─╚╬ęŌöĄ(sh©┤)ō■(j©┤)ŅÉą═Ż¼└²╚ń intĪófloatĪóchar Ą╚ĪŻ
- functionName ╩Ū║»öĄ(sh©┤)├¹Ż¼├³├¹ęÄ(gu©®)ät║═ūā┴┐├³├¹ęÄ(gu©®)ätŽÓ═¼ĪŻ║»öĄ(sh©┤)├¹║¾├µĄ─└©╠¢( )▓╗─▄╔┘ĪŻ
- body ╩Ū║»öĄ(sh©┤)¾wŻ¼╦³╩Ū║»öĄ(sh©┤)ąĶꬳ╠(zh©¬)ąąĄ─┤·┤aŻ¼╩Ū║»öĄ(sh©┤)Ą─ų„¾w▓┐ĘųĪŻ║»öĄ(sh©┤)¾wę¬ė├{ }░³ć·ĪŻ
- ╚ń╣¹ėąĘĄ╗žųĄŻ¼į┌║»öĄ(sh©┤)¾wųą╩╣ė├ return šZŠõĘĄ╗žĪŻreturn │÷üĒĄ─öĄ(sh©┤)ō■(j©┤)Ą─ŅÉą═ę¬║═ dataType ę╗śėĪŻ
- dataType1 param1, dataType2 param2 ...╩ŪģóöĄ(sh©┤)┴ą▒ĒĪŻ║»öĄ(sh©┤)┐╔ęįø]ėąģóöĄ(sh©┤)Ż¼ę▓┐╔ęįėąę╗éĆ╗“ČÓéĆģóöĄ(sh©┤)Ż¼ČÓéĆģóöĄ(sh©┤)ų«ķgė╔,ĘųĖ¶ĪŻģóöĄ(sh©┤)▒Š┘|(zh©¼)╔Žę▓╩Ūūā┴┐Ż¼Č©┴xĢrę¬ųĖ├„ŅÉą═║═├¹ĘQĪŻ
ą╬╩ĮģóöĄ(sh©┤)Ė┼─ŅŻ║
į┌Č©┴x║»öĄ(sh©┤)ĢrĄ─ģóöĄ(sh©┤)ūā┴┐ø]ėąŠ▀¾wĄ─öĄ(sh©┤)ō■(j©┤)Ż¼╦³ų╗─▄Ą╚ĄĮ║»öĄ(sh©┤)▒╗š{(di©żo)ė├ĢrĮė╩šé„▀f▀M(j©¼n)üĒĄ─öĄ(sh©┤)ō■(j©┤)Ż¼╦∙ęį║»öĄ(sh©┤)Č©┴xĢrĄ─ģóöĄ(sh©┤)ĘQ×ķą╬╩ĮģóöĄ(sh©┤)Ż¼║åĘQą╬ģóĪŻ
└²╚ńŻ║Č©┴xę╗éĆėŗ╦ŃmĄĮnų«ķg╦∙ėąš¹öĄ(sh©┤)Ą─║═Ż¼▓óĘĄ╗žĮY(ji©”)╣¹
int sum(int m, int n){
int i, sum=0;
for(i=m; i<=n; i++){
sum+=i;
}
return sum;
}
returnšZŠõ
ĮKų╣ę╗éĆ║»öĄ(sh©┤)Ż¼▓óŽ“š{(di©żo)ė├┤╦║»öĄ(sh©┤)Ą─║»öĄ(sh©┤)ĘĄ╗žę╗éĆųĄ
7.3 ║»öĄ(sh©┤)Ą─š{(di©żo)ė├
functionName(param1, param2, param3 ...);
functionName ╩Ū║»öĄ(sh©┤)├¹ĘQŻ¼param1, param2, param3 ...╩ŪīŹģó┴ą▒ĒĪŻīŹģóĄ─éĆöĄ(sh©┤)║═ŅÉą═ę¬║═║»öĄ(sh©┤)Č©┴xĢrĄ─ģóöĄ(sh©┤)éĆöĄ(sh©┤)║═ŅÉą═ę╗ų┬ĪŻ
īŹļHģóöĄ(sh©┤)Ė┼─ŅŻ║
║»öĄ(sh©┤)▒╗š{(di©żo)ė├ĢrĮo│÷Ą─ģóöĄ(sh©┤)▒╗┘xėĶ┴╦Š▀¾wĄ─öĄ(sh©┤)ō■(j©┤)Ż¼╦∙ęį║»öĄ(sh©┤)š{(di©żo)ė├ĢrĄ─ģóöĄ(sh©┤)ĘQ×ķīŹļHģóöĄ(sh©┤)Ż¼║åĘQīŹģóĪŻ║»öĄ(sh©┤)š{(di©żo)ė├ĢrŻ¼īŹģóĄ─ųĄĢ■é„▀fĮoą╬ģóĪŻ
int i = 10,j = 1000;
void setup() {
Serial.begin(9600);
}
void loop() {
int sum1 = sum(1,100);
Serial.Println(sum);
Serial.Println(sum(i,j));
}
7.4 ūā┴┐Ą─ū„ė├ė“
╦∙ų^ū„ė├ė“Ż©ScopeŻ®Ż¼Š═╩Ūūā┴┐Ą─ėąą¦╩╣ė├ĘČć·ĪŻūā┴┐Č╝ėąūį╝║Ą─ū„ė├ė“ĪŻøQČ©ūā┴┐ū„ė├ė“Ą─╩Ūūā┴┐Ą─Č©┴x╬╗ų├ĪŻ
Šų▓┐ūā┴┐
Č©┴xį┌║»öĄ(sh©┤)ā╚(n©©i)▓┐Ą─ūā┴┐ĘQ×ķŠų▓┐ūā┴┐Ż©Local VariableŻ®Ż¼╦³Ą─ū„ė├ė“āHŽ▐ė┌║»öĄ(sh©┤)ā╚(n©©i)▓┐Ż¼ ļxķ_įō║»öĄ(sh©┤)║¾Š═╩Ū¤oą¦Ą─Ż¼į┘╩╣ė├Š═Ģ■ł¾ÕeĪŻ
╚½Šųūā┴┐
į┌╦∙ėą║»öĄ(sh©┤)═Ō▓┐Č©┴xĄ─ūā┴┐ĘQ×ķ╚½Šųūā┴┐Ż©Global VariableŻ®Ż¼╦³Ą─ū„ė├ė“─¼šJ(r©©n)╩Ūš¹éĆ│╠ą“ĪŻ
8Īóarduinoā╚(n©©i)ų├│Żė├║»öĄ(sh©┤)
8.1 öĄ(sh©┤)ūų I/O║»öĄ(sh©┤)
pinMode(pin_num,─Ż╩Į) //įO(sh©©)ų├ę²─_Ą─▌ö╚ļ▌ö│÷─Ż╩Į digitalWrite(pin_num,value) //ī”öĄ(sh©┤)ūųę²─_▀M(j©¼n)ąąĖ▀Ą═ļŖŲĮįO(sh©©)ų├ digitalRead(pin_num) //ūx╚ĪöĄ(sh©┤)ūųę²─_ĀŅæB(t©żi)
8.2 ─ŻöM I/O║»öĄ(sh©┤)
analogRead(pin) //Å──ŻöMę²─_ūx╚ĪöĄ(sh©┤)ųĄŻ¼ĘČć·0ĄĮ1023
analogWrite(pin,value) //Ž“─ŻöMę²─_īæ╚ļöĄ(sh©┤)ųĄŻ¼ĘČć·0ĄĮ255Ż¼═©▀^PWMš╝┐š▒╚┐╔ęį┐žųŲ
//LED¤¶┴┴Č╚ĪóļŖÖC(j©®)Ą─▐D(zhu©Żn)╦┘Ą╚
8.3 Ģrķg║»öĄ(sh©┤)
millis()//ė├üĒ½@╚ĪArduinoķ_ÖC(j©®)║¾▀\(y©┤n)ąąĄ─ĢrķgķLČ╚Ż¼å╬╬╗╩Ū║┴├ļ,
//ūŅķL┐╔ėøõøĮėĮ³50╠ņū¾ėęĄ─ĢrķgĪŻ╚ń╣¹│¼│÷ėøõøĢrķg╔ŽŽ▐Ż¼ėøõøīóÅ─0ųžą┬ķ_╩╝ĪŻ
micros()//ė├üĒ½@╚ĪArduinoķ_ÖC(j©®)║¾▀\(y©┤n)ąąĄ─ĢrķgķLČ╚Ż¼å╬╬╗╩Ū╬ó├ļ,
//ūŅķL┐╔ėøõøĮėĮ³70╠ņū¾ėęĄ─ĢrķgĪŻ╚ń╣¹│¼│÷ėøõøĢrķg╔ŽŽ▐Ż¼ėøõøīóÅ─0ųžą┬ķ_╩╝ĪŻ
delay(x)//ė├ė┌Ģ║═Ż│╠ą“▀\(y©┤n)ąąĪŻĢ║═ŻĢrķg┐╔ęįė╔delay()║»öĄ(sh©┤)Ą─ģóöĄ(sh©┤)▀M(j©¼n)ąą┐žųŲŻ¼
//å╬╬╗╩Ū║┴├ļŻ©1├ļńŖŻĮ1000║┴├ļŻ®ĪŻ
delayMicroseconds(x)//┼cdelay()║»öĄ(sh©┤)╣”─▄ę╗śėŻ¼▓╗═¼Ą─╩ŪdelayMicroseconds()Ą─
//ģóöĄ(sh©┤)å╬╬╗╩Ū╬ó├ļ
8.4 «a(ch©Żn)╔·ļSÖC(j©®)öĄ(sh©┤)║»öĄ(sh©┤)
random()║»öĄ(sh©┤) //╔·│╔▓óĘĄ╗žę╗éĆļSÖC(j©®)öĄ(sh©┤)
long randNumber;
void setup(){
Serial.begin(9600);
}
void loop(){
randNumber = random(0, 300); //«a(ch©Żn)╔·0-300ķgĄ─ļSÖC(j©®)öĄ(sh©┤)
Serial.println(randNumber);
delay(50);
}
randomSeed()║»öĄ(sh©┤) //ė├üĒ«a(ch©Żn)╔·ļSÖC(j©®)ĘNūė
å╬¬Ü(d©▓)╩╣ė├random()║»öĄ(sh©┤)╦∙«a(ch©Żn)╔·Ą─ļSÖC(j©®)öĄ(sh©┤)Ż¼į┌├┐ę╗┤╬│╠ą“ųžą┬åóäė║¾Ż¼┐é╩ŪųžÅ═(f©┤)═¼ę╗ĮMļSÖC(j©®)öĄ(sh©┤)ūųĪŻ╚ń╣¹ŽŻ═¹│╠ą“ųžą┬åóäė║¾«a(ch©Żn)╔·Ą─ļSÖC(j©®)öĄ(sh©┤)ųĄ┼c╔Žę╗┤╬│╠ą“▀\(y©┤n)ąąĢrĄ─ļSÖC(j©®)öĄ(sh©┤)▓╗═¼Ż¼ätąĶę¬╩╣ė├randomSeed()║»öĄ(sh©┤)ĪŻ
į┌īŹļHæ¬(y©®ng)ė├ĢrŻ¼┐╔ęį═©▀^š{(di©żo)ė├analogRead()║»öĄ(sh©┤)ūx╚Īę╗éĆ┐šę²─_Ż¼ū„×ķļSÖC(j©®)ĘNūėöĄ(sh©┤)ųĄŻ¼╗“ė├micros()Ą├ĄĮę╗éĆĢrķgū„×ķļSÖC(j©®)öĄ(sh©┤)ĘNūėĪŻ
long randNumber;
void setup(){
Serial.begin(9600);
randomSeed(analogRead(A0));
//īóę²─_A0Ę┼┐šŻ¼├┐┤╬│╠ą“åóäėĢr╦∙ūx╚ĪĄ─öĄ(sh©┤)ųĄČ╝╩Ū▓╗═¼Ą─ĪŻ
//▀@├┤ū÷┐╔ęį«a(ch©Żn)╔·šµš²Ą─ļSÖC(j©®)ĘNūėųĄŻ¼Å─Č°«a(ch©Żn)╔·ļSÖC(j©®)öĄ(sh©┤)ųĄĪŻ
}
void loop(){
randNumber = random(300); // «a(ch©Żn)╔·ļSÖC(j©®)öĄ(sh©┤)
Serial.println(randNumber);
delay(50);
}
8.5 öĄ(sh©┤)īW(xu©”)▀\(y©┤n)╦Ń║»öĄ(sh©┤)
min(x,y) //Ū¾ā╔éĆöĄ(sh©┤)ų«ķgĄ─ūŅąĪųĄ max(x,y)//Ū¾ā╔éĆöĄ(sh©┤)ų«ķgĄ─ūŅ┤¾ųĄ abs(x) //Ū¾Į^ī”ųĄ pow(base, exponent) //ųĖöĄ(sh©┤)▀\(y©┤n)╦Ń║»öĄ(sh©┤)Ż¼ĘĄ╗žbaseöĄ(sh©┤)ųĄĄ─exponent┤╬ĘĮ sqrt(value) //ķ_ĘĮ║»öĄ(sh©┤),ĘĄ╗žvalueöĄ(sh©┤)ųĄĄ─ŲĮĘĮĖ∙ sin(rad) //ėŗ╦Ńę╗éĆĮŪČ╚Ą─š²ą■ųĄ▓óĘĄ╗žŻ¼radģóöĄ(sh©┤)å╬╬╗×ķ╗ĪČ╚Ż¼ąĶę¬░čČ╚öĄ(sh©┤)▐D(zhu©Żn)ōQ×ķ╗ĪČ╚ cos(rad) //ėŗ╦Ńę╗éĆĮŪČ╚Ą─ėÓŽęųĄ▓óĘĄ╗žŻ¼radģóöĄ(sh©┤)å╬╬╗×ķ╗ĪČ╚Ż¼ąĶę¬░čČ╚öĄ(sh©┤)▐D(zhu©Żn)ōQ×ķ╗ĪČ╚ tan(rad) //ėŗ╦Ńę╗éĆĮŪČ╚Ą─š²ą■ųĄ▓óĘĄ╗žŻ¼radģóöĄ(sh©┤)å╬╬╗×ķ╗ĪČ╚Ż¼ąĶę¬░čČ╚öĄ(sh©┤)▐D(zhu©Żn)ōQ×ķ╗ĪČ╚
8.6 ┤«┐┌═©ėŹ║»öĄ(sh©┤)
Serial.begin() //įO(sh©©)ų├ļŖ─X┼cArduino▀M(j©¼n)ąą┤«┐┌═©ėŹĢrĄ─öĄ(sh©┤)ō■(j©┤)é„▌ö╦┘┬╩Ż©├┐├ļé„▌öbitöĄ(sh©┤)Ż®
Serial.setTimeout(time)//ė├ė┌įO(sh©©)ų├įO(sh©©)éõĄ╚┤²öĄ(sh©┤)ō■(j©┤)│¼ĢrĢrķgĪŻå╬╬╗║┴├ļŻ¼─¼šJ(r©©n)×ķ1000║┴├ļ
Serial.print(value) //ęįūųĘ¹ą╬╩ĮŽ“┤«┐┌░l(f©Ī)╦═öĄ(sh©┤)ō■(j©┤)
Serial.println(value)//ęįūųĘ¹ą╬╩ĮŽ“┤«┐┌░l(f©Ī)╦═öĄ(sh©┤)ō■(j©┤),▓óōQąą
Serial.available()//ė├ė┌Öz▓ķ┤«┐┌╩ŪʱĮė╩šĄĮöĄ(sh©┤)ō■(j©┤)ĪŻĘĄ╗žĄ╚┤²ūx╚ĪĄ─öĄ(sh©┤)ō■(j©┤)ūų╣Ø(ji©”)öĄ(sh©┤)ĪŻ
Serial.parseInt()//ė├ė┌Å─įO(sh©©)éõĮė╩šĄĮĄ─öĄ(sh©┤)ō■(j©┤)ųąīżšęš¹öĄ(sh©┤)öĄ(sh©┤)ųĄ▓óĘĄ╗žĪŻ
Serial.read() //Å─įO(sh©©)éõĮė╩šĄĮöĄ(sh©┤)ō■(j©┤)ųąūx╚Īę╗éĆūų╣Ø(ji©”)Ą─öĄ(sh©┤)ō■(j©┤)ĪŻ
Serial.readBytes(buffer, length)
//ė├ė┌Å─įO(sh©©)éõĮė╩šĄ─öĄ(sh©┤)ō■(j©┤)ųąūx╚Īą┼ŽóĪŻūx╚ĪĄĮĄ─öĄ(sh©┤)ō■(j©┤)ą┼Žóīó┤µĘ┼į┌ŠÅ┤µūā┴┐ųąĪŻ
//įō║»öĄ(sh©┤)į┌ūx╚ĪĄĮųĖČ©ūų╣Ø(ji©”)öĄ(sh©┤)Ą─ą┼Žó╗“š▀▀_(d©ó)ĄĮįO(sh©©)Č©Ģrķg║¾Č╝Ģ■═Żų╣║»öĄ(sh©┤)ł╠(zh©¬)ąą▓óĘĄ╗žĪŻ
Serial.readBytesUntil(character, buffer, length)
//ė├ė┌Å─įO(sh©©)éõĮė╩šĄĮöĄ(sh©┤)ō■(j©┤)ųąūx╚Īą┼ŽóĪŻūx╚ĪĄĮĄ─öĄ(sh©┤)ō■(j©┤)ą┼Žóīó┤µĘ┼į┌ŠÅ┤µūā┴┐ųąĪŻ
//įō║»öĄ(sh©┤)į┌ØMūŃęįŽ┬╚╬ę╗Śl╝■║¾Č╝Ģ■═Żų╣║»öĄ(sh©┤)ł╠(zh©¬)ąą▓óŪęĘĄ╗žĪŻ
//©C ūx╚ĪĄĮųĖČ©ĮKų╣ūųĘ¹
//©C ūx╚ĪĄĮųĖČ©ūų╣Ø(ji©”)öĄ(sh©┤)Ą─ą┼Žó
//©C ▀_(d©ó)ĄĮįO(sh©©)Č©ĢrķgŻ©┐╔╩╣ė├setTimeoutüĒįO(sh©©)ų├Ż®
Serial.readString()//ė├ė┌Å─įO(sh©©)éõĮė╩šĄĮöĄ(sh©┤)ō■(j©┤)ųąūx╚ĪöĄ(sh©┤)ō■(j©┤)ą┼ŽóĪŻ
//ūx╚ĪĄĮĄ─ą┼ŽóīóęįūųĘ¹┤«Ė±╩ĮĘĄ╗žĪŻ
Serial.readStringUntil(terminator)
//ė├ė┌Å─įO(sh©©)éõĮė╩šĄĮĄ─öĄ(sh©┤)ō■(j©┤)ųąūx╚Īą┼ŽóĪŻūx╚ĪĄĮĄ─öĄ(sh©┤)ō■(j©┤)ą┼ŽóīóęįūųĘ¹┤«ą╬╩ĮĘĄ╗žĪŻ
//įō║»öĄ(sh©┤)į┌ØMūŃęįŽ┬╚╬ę╗Śl╝■║¾Č╝Ģ■═Żų╣║»öĄ(sh©┤)ł╠(zh©¬)ąą▓óĘĄ╗žĪŻ
//©C ūx╚ĪĄĮųĖČ©ĮKų╣ūųĘ¹
//©C ▀_(d©ó)ĄĮįO(sh©©)Č©ĢrķgŻ©┐╔╩╣ė├setTimeoutüĒįO(sh©©)ų├Ż®
Serial.write(val)
Serial.write(str)
Serial.write(buf, len)
//ęįČ■▀M(j©¼n)ųŲöĄ(sh©┤)ō■(j©┤)Ž“┤«┐┌░l(f©Ī)╦═öĄ(sh©┤)ō■(j©┤)Ż¼öĄ(sh©┤)ō■(j©┤)╩Ūę╗éĆūų╣Ø(ji©”)ę╗éĆūų╣Ø(ji©”)Ąž░l(f©Ī)╦═Ą─Ż¼
//╚¶ęįūųĘ¹ą╬╩Į░l(f©Ī)╦═öĄ(sh©┤)ūųšł╩╣ė├print()┤·╠µĪŻ
ģóöĄ(sh©┤)
//val: ū„×ķå╬éĆūų╣Ø(ji©”)░l(f©Ī)╦═Ą─öĄ(sh©┤)ō■(j©┤)
//str: ė╔ę╗ŽĄ┴ąūų╣Ø(ji©”)ĮM│╔Ą─ūųĘ¹┤«
//buf: ═¼ę╗ŽĄ┴ąūų╣Ø(ji©”)ĮM│╔Ą─öĄ(sh©┤)ĮM
//len: ę¬░l(f©Ī)╦═Ą─öĄ(sh©┤)ĮMĄ─ķLČ╚
īŹ└²Ż║
Serial.begin()ĪóSerial.println()ĪóSerial.parseInt()║»öĄ(sh©┤)ė├Ę©Ż║
void setup() {
// åóäė┤«┐┌═©ėŹ
Serial.begin(9600);
Serial.println();
}
void loop() {
if (Serial.available()){ // «ö(d©Īng)┤«┐┌Įė╩šĄĮą┼Žó║¾
int serialData = Serial.parseInt(); // ╩╣ė├parseInt▓ķšęĮė╩šĄĮĄ─ą┼ŽóųąĄ─š¹öĄ(sh©┤)
Serial.print("serialData = "); // ╚╗║¾═©▀^┤«┐┌▒O(ji©Īn)ęĢŲ„▌ö│÷šęĄĮĄ─öĄ(sh©┤)ųĄ
Serial.println(serialData);
}
}
Serial.read()ė├Ę©Ż║
void setup() {
// åóäė┤«┐┌═©ėŹ
Serial.begin(9600);
Serial.println();
}
void loop() {
while (Serial.available()){ // «ö(d©Īng)┤«┐┌Įė╩šĄĮą┼Žó║¾
char serialData = Serial.read(); // īóĮė╩šĄĮĄ─ą┼Žó╩╣ė├readūx╚Ī
Serial.println((char)serialData); // ╚╗║¾═©▀^┤«┐┌▒O(ji©Īn)ęĢŲ„▌ö│÷read║»öĄ(sh©┤)ūx╚ĪĄ─ą┼Žó
}
}
//char terminateChar = 'T'; // Į©┴óĮKų╣ūųĘ¹
const int bufferLength = 10; // Č©┴xŠÅ┤µ┤¾ąĪ×ķ10éĆūų╣Ø(ji©”)
char serialBuffer[bufferLength];// Į©┴óūųĘ¹öĄ(sh©┤)ĮMė├ė┌ŠÅ┤µ
void setup() {
// åóäė┤«┐┌═©ėŹ
Serial.begin(9600);
Serial.println();
}
void loop() {
if (Serial.available()){ // «ö(d©Īng)┤«┐┌Įė╩šĄĮą┼Žó║¾
Serial.println("Received Serial Data:");
// īóĮė╩šĄĮĄ─ą┼Žó╩╣ė├readBytesUntilūx╚Ī
//Serial.readBytesUntil(terminateChar, serialBuffer, bufferLength);
//īóĮė╩šĄĮĄ─ą┼Žó╩╣ė├readBytesūx╚Ī
Serial.readBytes(serialBuffer, bufferLength);
for(int i=0; i<bufferLength; i++){ // ╚╗║¾═©▀^┤«┐┌▒O(ji©Īn)ęĢŲ„▌ö│÷readBytes
Serial.print(serialBuffer[i]); // ║»öĄ(sh©┤)╦∙ūx╚ĪĄ─ą┼Žó
}
Serial.println("");
Serial.println("Finished Printing Recevied Data.");
}
}
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū