
─┐ õø
│¼┬Ģ▓©╩Ūę╗ĘNš±äėŅl┬╩│¼▀^20kHzĄ─ÖCąĄ▓©Ż¼čžų▒ŠĆĘĮŽ“é„▓źŻ¼é„▓źĘĮŽ“ąį║├Ż¼é„▓źŠÓļxę▓▌^▀hŻ¼į┌Įķ┘|ųąé„▓źĢrė÷ĄĮšŽĄK╬’Š═Ģ■«a╔·Ę┤╔õ▓©ĪŻ┤╦═ŌŻ¼─ŻēK▒Š╔Ē¾wĘeąĪŻ¼ęūė┌į┌╚╬║╬ÖCŲ„╚╦ĒŚ─┐ųą╩╣ė├Ż¼▓ó╠ß╣®2└Õ├ūų┴400└Õ├ūŻ©╝s1ėó┤ńų┴13ėó│▀Ż®ų«ķg│÷╔½Ą─ĘŪĮėė|ĘČć·Öz£yŻ¼Š½Č╚×ķ3mmĪŻ╣żū„ļŖē║×ķ5Ę³ĪŻė╔ė┌│¼┬Ģ▓©Ą─ęį╔Ž╠ž³cŻ¼ę“┤╦▒╗ÅVĘ║Ąžæ¬ė├ė┌╬’¾wŠÓļxĄ─£y┴┐ųąĪŻ
HC-SR04ę╗┐ŅįOėŗėą│¼┬Ģ▓©░l╔õ╠ĮŅ^ĪóĮė╩š╠ĮŅ^Īóą┼╠¢Ę┼┤¾╝»│╔ļŖ┬ĘĄ╚│¼┬Ģ▓©─ŻēK─ŻēK╣▓╦─éĆę²─_,VCC×ķ5V╣®ļŖ,Trig×ķė|░lą┼╠¢▌ö╚ļŻ¼Echo×ķ╗žĒæą┼╠¢▌ö│÷Ż¼GND×ķļŖį┤ĄžĪŻ
īŹ¼F╣”─▄
į┌╚ė└¼╗°ų«Ū░Ż¼ė├╩ų╗“Ųõ╦¹šŽĄK╬’Ę┼į┌│¼┬Ģ▓©é„ĖąŲ„ų«Ū░Ż¼«öŠÓļx15cmĢrŻ¼ČµÖC▐DäėŻ¼īŹ¼F╔wūėĘŁŲĪŻųĖ╩Š¤¶┴┴Ż¼Ęõ°QŲ„░l╔·ĪŻį┌10├ļ║¾Ż¼ČµÖC╗žĄĮįŁ╬╗Ż¼╔wūė╔w╔ŽĪŻ

łD1 HC-SR04│¼┬Ģ▓©£yŠÓ─ŻēK
| VCC | HC-SR04ļŖį┤Įė┐┌Ż¼ĮėArduino╔ŽĄ─5Vę²─_ |
| Trig (TriggerŻ® | Ž“═ŌĮńė|░l│¼┬Ģ▓©├}ø_Ż¼Įėę²─_12 |
| Echo | ╗žĒæą┼╠¢▌ö│÷ĪŻ«öĮė╩šĄĮĘ┤╔õą┼╠¢ĢrŻ¼ę²─_«a╔·ę╗éĆ├}ø_ĪŻ├}ø_Ą─ķLČ╚┼cÖz£y░l╔õą┼╠¢╦∙ąĶĄ─Ģrķg│╔š²▒╚Ż¼Įėę²─_11 |
| GND | HC-SR04ĮėĄžę²─_Ż¼ĮėArduino GND |
╣żū„įŁ└Ē
łD2 HC-SR04│¼┬Ģ▓©£yŠÓĢrą“łD
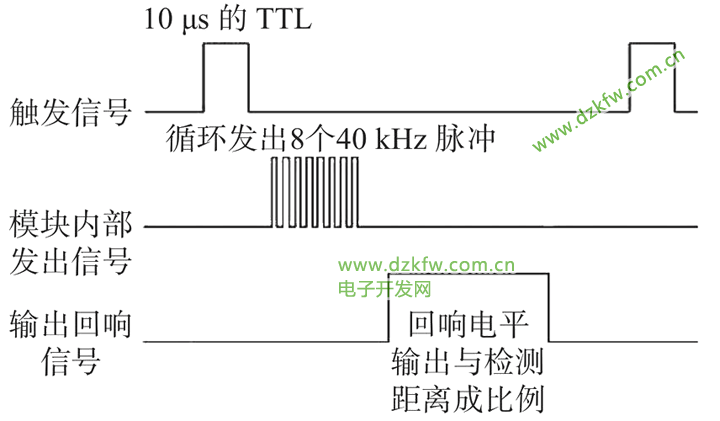
ArduinoĮo│¼┬Ģ▓©─ŻēKTrigę²─_10”╠sęį╔ŽĄ─├}ø_ė|░lą┼╠¢Ż¼─ŻēKā╚▓┐ūįäė░l╦═8éĆ40kHzĄ─┬Ģę¶├}ø_Ż¼ę╗Ą®Öz£yĄĮĘ┤╔õą┼╠¢Ż¼╝┤▌ö│÷╗žĒæą┼╠¢(Echoę²─_)╩╣įOéõĄ─Ī░│¼┬Ģ╠žš„Ī▒ūāĄ├¬Üę╗¤oČ■Ż¼Å─Č°╩╣Įė╩šŲ„─▄ē“īó░l╔õ─Ż╩Į┼cŁhŠ││¼┬Ģįļ┬Ģģ^Ęųķ_Ż¼╗žĒæą┼╠¢├}ø_īÆČ╚┼c▒╗£yŠÓļx│╔š²▒╚ĪŻ╚ń╣¹▀@ą®├}ø_ø]ėą▒╗Ę┤╔õ╗žüĒŻ¼ät╗ž▓©ą┼╠¢īóį┌38║┴├ļŻ©38║┴├ļŻ®║¾│¼Ģr▓óĘĄ╗žĄ═ļŖŲĮĪŻ
ļŖ┬Ę▀BĮė
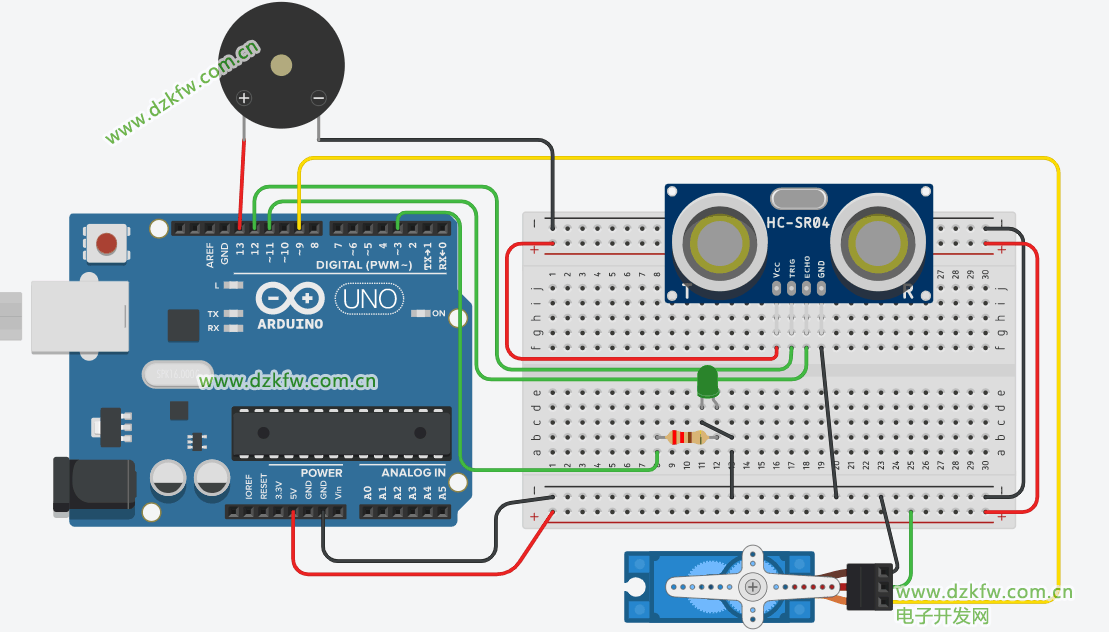
łD3 ļŖ┬Ę▀BĮė
┐žųŲ┤·┤a
#include <Servo.h>
Servo myservo;
int trig=12;
int echo=11;
int led13=13;
int led3=3;
void setup(){
myservo.attach(9);
Serial.begin(9600);
pinMode(echo,INPUT);
pinMode(trig,OUTPUT);
pinMode(led13,OUTPUT);
pinMode(led3,OUTPUT);
}
void loop(){
myservo.write(0);
long val=0;
digitalWrite(trig,HIGH);
delayMicroseconds(15);
digitalWrite(trig,LOW);
val=pulseIn(echo,HIGH);
float S=val/58.00;
if(S<15){
myservo.write(100);
digitalWrite(led13,HIGH);
digitalWrite(led3,HIGH);
}
delay(10000);
S=0;
digitalWrite(led13,LOW);
digitalWrite(led3,LOW);
}
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū