
╦┼Ę■ļŖÖCČ©╬╗įŁ└Ē║▄║åå╬Ż¼ļŖÖCą²▐DĦäėĮzŚU▐DōQ░čą²▐D┴┐▐DōQ│╔ŲĮęŲ┴┐Ż¼├}ø_Ą─öĄ┴┐Š═╩ŪęŲäėĄ─ŠÓļxŻ¼╬ęéāų╗ę¬ų¬Ą└├}ø_ŪķørŠ═─▄ėŗ╦Ń│÷╬╗ų├ą┼ŽóĪŻļŖūė²X▌å▒╚╠ß╣®┴╦║åå╬ęūė├Ą─ąą│╠▒╚└²ūāĖ³Ż¼╚ń¼Fį┌ę╗╠ū╦┼Ę■ŽĄĮy┼_▀_ASDA-BŽĄ┴ąĄ─“īäėŲ„Ż¼ŠÄ┤aŲ„Ęų▒µ┬╩×ķ160000p/r,ÖCąĄįOéõĄ─ĮzŚUī¦│╠×ķ10mmŻ¼£p╦┘ÖC£p╦┘▒╚×ķ15Ż¼¼Fę¬Ū¾├┐éĆ├}ø_Ą─ęŲäė┴┐×ķ1ĮzŻ¼ėŗ╦ŃļŖūė²X▌å▒╚Ą─Ęų─Ė┼cĘųūėN/MĪŻ╬ęéāĄ─╦╝┬Ę║▄║åå╬Ż¼▓╗ę¬╠ū╣½╩ĮŻ¼▀Mąąę╗éĆ║åå╬Ąžī”▒╚Š═┐╔ęįėŗ╦Ń│÷Ż¼╚ńŽ┬▒ĒųąĄ─▐DōQŻ║
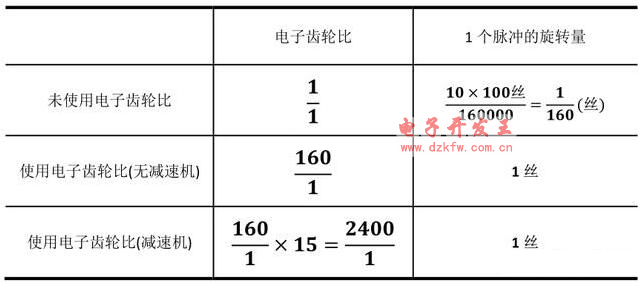
╩ūŽ╚┐╝æ]▓╗╩╣ė├ļŖūė²X▌å▒╚Ą─Ūķørå╬╬╗├}ø_Ą─ęŲäė┴┐ų╗ėą1/160ĮzŻ¼▀_▓╗ĄĮ╬ęéāĄ─ę¬Ū¾ę“┤╦ąĶę¬öU┤¾▒ČöĄ(╦³Ą─Ą╣öĄ)üĒØMūŃŻ¼▀@╩Ūį┌ø]ėą£p╦┘ÖCĄ─ŪķørŽ┬Ż¼╚ń╣¹ėą£p╦┘ÖC╦³Ą─├}ø_┴┐ėųĢ■┐sąĪŻ¼ę“×ķąĶę¬└^└möU┤¾▒ČöĄ(£p╦┘▒╚)Ż¼▀@śėį┌Ą├│÷┴╦ļŖūė²X▌å▒╚Ą─Ęųūė2400Ż¼Ęų─Ė×ķ1ĪŻį┌┼_▀_“īäėŲ„Ą─ģóöĄĮMP1-44ļŖūė²X▌å▒╚ĘųūėįOų├2400Ż¼P1-45Ęų─ĖįOų├×ķ1╝┤┐╔ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū