
Į±╠ņį┌ą▐Å═ļx┬Ü═¼╩┬▀z┴¶Ž┬üĒĻPė┌ŠÄ┤aŲ„Ą─bugŻ¼╬ęų«Ū░ę▓ø]Įėė|▀^▀@═µęŌŻ¼Ū░▌ģĄ─ū÷Ę©╩Ūį┌Č©ĢrŲ„ųą▓ķįāABŽÓĄ─ļŖŲĮĀŅæBŻ¼üĒ┼ąöÓ«öŪ░╩Ūš²é„▀Ć╩ŪĘ┤š²ĪŻ╦¹ĖŃ┴╦éĆČ©ĢrŲ„1ęń│÷ųąöÓŻ¼īó32MĢrńŖ▀Mąą┴╦64000ĘųŅlŻ¼131s,ą┼╠¢Č╝┬®Ą¶┴╦Ż¼╬ęīóŲõĖ─×ķ┴╦1600ĘųŅlŻ¼16╬╗ęń│÷ę▓Š═╩Ū400msŻ¼š²│Ż▀\ąąŻ©IAR 8.20Ż®ĪŻ
▀@éĆå¢Ņ}į┌ūŅą┬Ą─IARŻ©IAR 9.30Ż®▓╗Ģ■Å═¼FŻ¼▓óŪę▓╗╣▄──ĘNĘųŅlį┌ūŅą┬Ą─IAR┐╔ęįš²│Ż▀\ąąĪŻę▓įS▀ĆėąĄžĘĮĄ─▀ē▌ŗø]ėą┐┤├„░ūŻ¼ūŅĮK▀Ć╩Ūø]ėą╚źĖ─╦¹Ą─ĘųŅlĪŻ
ĮėŽ┬üĒ╬ęéāų▒ĮėüĒ┐┤ĻPė┌ŠÄ┤aŲ„Ą─łDŻ║
ŠÄ┤aŲ„╣żū„įŁ└Ē╝░╚ń║╬īŹ¼FČ©╬╗┐žųŲŻ¼├ļČ«ŻĪwww.shkcfs.com/Article/MEMS/5738.html
┐žųŲŻ║
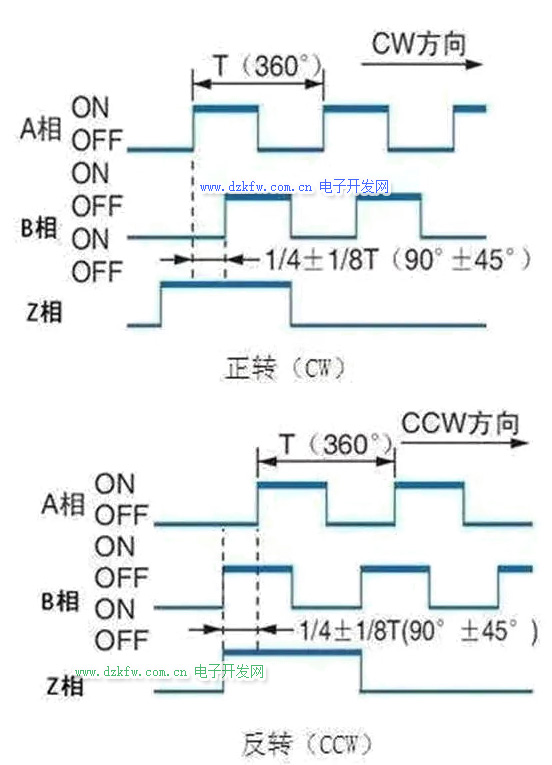
a. ęį╔Ž▀BĮė╩Ū┤¾Ė┼įŁ└ĒŻ¼╬ęéā▓╗┐┤zŽÓŻ¼ų▒Įė┐┤ĻPė┌ABŽÓš²Ę┤▐DĄ─Ą─┐žųŲŻ║
1. ĒśĢrßśŻ║AŽÓė|░l╔Ž╔²čžŻ¼─Ū├┤ĮėŽ┬üĒBę▓ė|░l╔Ž╔²čžŻ╗AŽÓė|░lŽ┬ĮĄčžŻ¼BŽÓę▓ė|░lŽ┬ĮĄčž
2. ─µĢrßśŻ║AŽÓė|░l╔Ž╔²čžŻ¼─Ū├┤ĮėŽ┬üĒBė|░lŽ┬ĮĄčžŻ╗ AŽÓė|░lŽ┬ĮĄčžŻ¼BŽÓė|░l╔Ž╔²čž
b. ▀@śė╬ęŠ═ąĶę¬įOų├ļp▀ģčžė|░lųąöÓŻ¼Ą½╩Ūī”ė┌ę╗ą®Ą═Č╦Ą─å╬Ų¼ÖCüĒųvŻ¼┐╔─▄¤oĘ©ū÷ĄĮŻ¼▀@éĆĢr║“Š═ąĶę¬ė├Č©ĢrŲ„║═ūxIOĄ─ļŖŲĮĀŅæBüĒū÷Ż©Ū░═¼╩┬ų«Ū░Ą─ū÷Ę©╩ŪīócoderScan()Ę┼ĄĮČ©ĢrŲ„ųąöÓ║»öĄųąŻ¼×ķ┴╦╠Ä└ĒÄūéĆ║═ĢrķgėąĻPĄ─╚╬䚯¼ķ_┴╦4éĆČ©ĢrŲ„Ż¼╬ęéā═Ļ╚½┐╔ęį╩╣ė├ĢrķgŲ¼Ą─ĘĮ╩Įū÷Ż®
1.ĒśĢrßśŻ║ ╚ń╣¹AŽÓŪ░ę╗┐╠Ą─ļŖŲĮ║═«öŪ░ļŖŲĮ▓╗ę╗śėŻ¼▓óŪę«öŪ░ļŖŲĮ×ķĄ═Ż¼BŽÓ×ķĄ═Ż¼ätĒśĢrßśą²▐DŻ╗ ╚ń╣¹BŽÓŪ░ę╗┐╠Ą─ļŖŲĮ║═«öŪ░ļŖŲĮ▓╗ę╗śėŻ¼▓óŪę«öŪ░ļŖŲĮ×ķĖ▀Ż¼AŽÓ×ķĄ═ĪŻ
2. ─µĢrßśŻ║ ╚ń╣¹AŽÓŪ░ę╗┐╠Ą─ļŖŲĮ║═«öŪ░ļŖŲĮ▓╗ę╗śėŻ¼▓óŪę«öŪ░ļŖŲĮ×ķĄ═Ż¼BŽÓ×ķĖ▀Ż¼ät─µĢrßśą²▐DŻ╗╚ń╣¹BŽÓŪ░ę╗┐╠Ą─ļŖŲĮ║═«öŪ░ļŖŲĮ▓╗ę╗śėŻ¼▓óŪę«öŪ░ļŖŲĮ×ķĖ▀Ż¼AŽÓ×ķĖ▀ĪŻ
void coderScan()
{
u8 i;
u8 aPin, bPin;
for(i=0; i<CODER_NUM; i++) //Å─ŠÄ┤aŲ„1 ĄĮ ŠÄ┤aŲ„n▌åįāÖz£y
{
aPin = GPIO_ReadInputDataBit(CODER_IO_ARRAY[i].aPin.group, CODER_IO_ARRAY[i].aPin.pin);
bPin = GPIO_ReadInputDataBit(CODER_IO_ARRAY[i].bPin.group, CODER_IO_ARRAY[i].bPin.pin);
if((_coder[i].aPin != aPin) && (aPin == 0x00)) /* ūx╚ĪĄĮĄ─ųĄ×ķĄ═ļŖŲĮ */
{
if(bPin) // ļŖē║Ž┬ĮĄėąą¦
{
coderCCW(i);//─µĢrßśą²▐D
}
else
{
coderCW(i);//ĒśĢrßśą²▐D
}
}
else if((_coder[i].bPin != bPin) && (bPin == 0x01))
{
if(aPin) // ļŖē║╔Ž╔²ėąą¦
{
coderCCW(i);//─µĢrßśą²▐D
}
else
{
coderCW(i);//ĒśĢrßśą²▐D
}
}
_coder[i].aPin = aPin;
_coder[i].bPin = bPin;
}
}
ę╗░ŃŻ¼ŠÄ┤aŲ„ą²▐Dę╗╚”ėą1024éĆ├}ø_Ż¼Č°ŠÄ┤aŲ„╩ŪėąĖ±öĄĄ─Ż©├┐┤╬▀Ū░╔ę╗┬Ģ▐Däė┴╦ę╗Ė±Ż®Ż¼╬ęöĄ┴╦ę╗Ž┬╬ę╩ų╔ŽĄ─ėą30Ė±Ż¼ę“┤╦Žļ꬚²┤_▒Ē╩Šą²▐DŻ¼╬ęéā▓╗āHę¬═©▀^ļŖŲĮūā╗»ų¬Ą└ĘĮŽ“Ż¼▀Ćę¬Ė∙ō■├}ø_Ė±öĄüĒ┼ąöÓŻ¼ę▓Š═╩Ū┤¾Ė┼ę╗Ė±34éĆ├}ø_Ż¼╚ń╣¹░┤90%ėŗ╦Ń├}ø_éĆöĄŻ¼ę▓Š═Öz£yĄĮ30éĆ├}ø_ė|░lę╗┤╬ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū