
(1)Ęų╬÷┐žųŲę¬Ū¾Ż¼īó┐žųŲ▀^│╠Ęų│╔╚¶Ė╔éĆ╣żū„▓ĮŻ¼├„┤_Ė„▓ĮĄ─╣”─▄Ż¼┼¬ŪÕĘųų¦Ą─ĮYśŗŻ©╚ńå╬ą“┴ąĪó▀xō±ą“┴ąĪó▓óąąą“┴ąŻ®Ż¼┤_Č©Ė„▓ĮĄ─▐DōQŚl╝■Ż¼īó┐žųŲę¬Ū¾ė├╣”─▄łD▒Ē╩Š│÷üĒĪŻ
(2)┤_Č©╦∙ąĶĄ─I/O³cöĄŻ¼▀xō±PLCÖCą═Ż¼▀MąąI/OĘų┼õĪŻ
(3)Įo├┐éĆ▓ĮĘų┼õę╗éĆ┐žųŲ╬╗ĪŻī”ė┌S7-200ŽĄ┴ąPLCŻ¼┐╔ęį▀xō±Ēśą“┐žųŲ└^ļŖŲ„SĪóā╚▓┐ś╦ųŠ╬╗┤µā”Ų„MĄ─╬╗ĪŻ
(4)Ė∙ō■Ēśą“╣”─▄łDŻ¼įOėŗ│÷╠▌ą╬łD│╠ą“Ż¼ūŅ║¾Ė∙ō■─│ą®╠ž╩Ōę¬Ū¾Ż¼╠Ē╝ė▓┐Ęų┐žųŲ│╠ą“ĪŻ
ĪŠ└²7-6Ī┐═Ļ│╔łD7-20╦∙╩ŠĄ──│ĮM║ŽÖC┤▓äė┴”Ņ^▀MĮo▀\äėĄ─┐žųŲ│╠ą“įOėŗĪŻ
(1)│╠ą“įOėŗ▀^│╠Ż║
ó┘└LųŲĒśą“╣”─▄łDŻ¼╚ńłD7-21╦∙╩ŠĪŻ
ó┌▀MąąI/OĘų┼õŻ¼ęŖ▒Ē7-9ĪŻĖ∙ō■▌ö╚ļąĶę¬4³cŻ¼▌ö│÷ąĶę¬3³cŻ¼┐╔ęį▀xō±S7 CPU221 AC/DC/└^ļŖŲ„ą═PLCĪŻ
ó█Įo├┐▓ĮĘų┼õ▌oų·└^ļŖŲ„ĪŻ│§╩╝▓ĮĄ─▌oų·└^ļŖŲ„×ķM0.0Ż¼Ą┌1▓ĮĄ─▌oų·└^ļŖŲ„×ķM0.1Ż¼Ą┌2▓ĮĄ─▌oų·└^ļŖŲ„×ķM0.2Ż¼Ą┌3▓ĮĄ─▌oų·└^ļŖŲ„×ķM0.3ĪŻ
▒Ē7-9 äė┴”Ņ^┐žųŲŽĄĮyĄ─I/OĘų┼õ▒Ē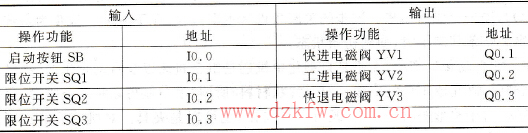
ó▄Ė∙ō■Ēśą“╣”─▄łDŻ¼«ŗ│÷╠▌ą╬łDŻ¼╚ńłD7-26╦∙╩ŠĪŻ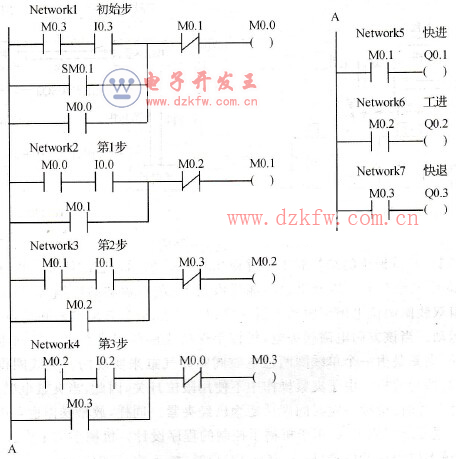
łD7-26 äė┴”Ņ^┐žųŲĄ─╠▌ą╬łD
(2)╠▌ą╬łD╣żū„▀^│╠Ęų╬÷Ż║
ó┘│§╩╝▓Įäė┴”Ņ^į┌įŁ╬╗Ą╚┤²Ż¼ŽĄĮy╔ŽļŖĢr╝ż╗Ņ│§╩╝▓ĮŻ¼▌oų·└^ļŖŲ„M0.1Ī½M0.3Š∙▓╗Ą├ļŖĪŻ
ó┌Ą┌1▓Į╩ŪŽĄĮy┐ņ▀M▓ĮĪŻį┌│§╩╝▓ĮM0.0╝ż╗ŅĄ─ŪķørŽ┬Ż¼░┤åóäė░┤Ōo║¾Ż¼įō▓ĮŠ═│╔×ķ╗Ņäė▓ĮĪŻ
ó█Ą┌2▓Į╩ŪŽĄĮy╣ż▀M▓ĮĪŻį┌Ą┌1▓Įš²į┌ł╠ąąŻ©M0.1×ķĪ░ONĪ▒Ż®Ą─Śl╝■Ž┬Ż¼ē║Ž┬Ž▐╬╗ķ_ĻPSQ1Ż¼įō▓Įūā│╔╗Ņäė▓ĮĪŻ
ó▄Ą┌3▓Į╩ŪŽĄĮy┐ņ═╦▓ĮĪŻį┌Ą┌2▓Įš²į┌ł╠ąą(M0.2×ķĪ░ONĪ▒)Ą─Śl╝■Ž┬Ż¼ē║Ž┬Ž▐╬╗ķ_ĻPSQ2Ż¼įō▓Įūā│╔╗Ņäė▓ĮĪŻįō▓ĮĄ─ĻPöÓŚl╝■×ķ═╦╗žįŁ╬╗Ż¼ē║Ž┬SQ3ĪŻįō▓Į×ķŽĄĮyūŅ║¾ę╗▓ĮŻ¼«öĻPöÓŚl╝■ØMūŃĢrŻ¼╗žĄĮ│§╩╝ĀŅæBĪŻ
į┌╣żśIūįäė╗»╔·«aųąŻ«¤ošō╩Ūūįäė╗»å╬ÖC▀Ć╩ŪĮM║ŽÖC┤▓ęį╝░ūįäė╗»╔·«aŠĆŻ¼Įø│Żę¬ė├ĄĮÖCąĄ╩ųŻ¼ęį═Ļ│╔╣ż╝■Ą─╚ĪĘ┼ĪŻī”ė┌Ų¼ĀŅ▓─┴ŽŻ¼╦∙ų^Ī░╩ųĪ▒Ż¼╝╚┐╔ęį╩Ūšµ┐š╬³▒PŻ¼ę▓┐╔ęį╩ŪļŖ┤┼ĶFŻ╗ī”ė┌░¶ą╬Ą╚▓─┴ŽŻ¼Ī░╩ųĪ▒╝╚┐╔ęį╩ŪŖAŃQŻ¼ę▓┐╔ęį╩ŪŖAŠ▀ĪŻī”ÖCąĄ╩ųĄ─┐žųŲų„ę¬╩Ū╬╗ų├ūRäeĪó▀\äėĘĮŽ“┐žųŲęį╝░ī”╬’┴Ž╩Ūʱ┤µį┌Ą─┼ąäeĪŻ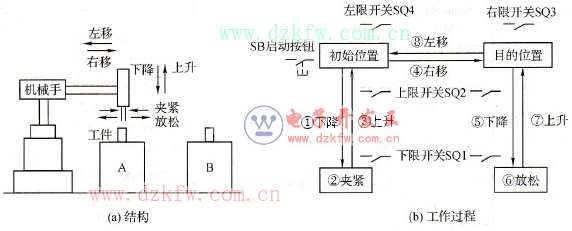
łD7-27 ÖCąĄ╩ų┐žųŲłD
ĪŠ└²7-7Ī┐─│ÖCąĄ╩ųĄ─ĮYśŗ║═╣żū„▀^│╠╚ńłD7-27╦∙╩ŠĪŻ╦³Ą─╚╬äš╩ŪīóA╣żū„┼_Ą─╣ż╝■░ß▀\ĄĮB╣żū„┼_╔ŽĪŻÖCąĄ╩ų╩Ūė╔─▄╠ß╣®╔ŽŽ┬Īóū¾ėę▀\äėĄ─ÖCąĄĮM│╔Ż¼╔ŽŽ┬┼cū¾ėę▀\äėĘųäeė╔ļpŠĆ╚”ā╔╬╗ļŖ┤┼ķy“īäėÜŌĖūüĒīŹ¼FĪŻę╗Ą®─│éĆĘĮŽ“ļŖ┤┼ķyĄ├ļŖŻ¼ÖCąĄ╩ų螎Óæ¬ĘĮŽ“▀\äėĪŻ«öįōĘĮŽ“ļŖ┤┼ķy╩¦ļŖŻ¼ÖCąĄ╩ų▒Ż│ų«öŪ░╬╗ų├ų▒ų┴┴Ēę╗ĘĮŽ“ļŖ┤┼ķyĄ├ļŖ×ķų╣ĪŻĘ┼╦╔Ż»ŖAŠo╩Ūė╔ę╗éĆå╬ŠĆ╚”ā╔╬╗ļŖ┤┼ķy“īäėÜŌĖūüĒīŹ¼FĄ─ĪŻ«öŠĆ╚”Ą├ļŖĢr╝┤×ķŖAŠoŻ¼╩¦ļŖĢr╝┤×ķĘ┼╦╔ĪŻė╔ė┌ŖAŠo▓┘ū„ųą▓╗╩╣ė├Ž▐╬╗ķ_ĻPŻ¼ę“┤╦Ż¼«öŖAŠoļŖ┤┼ķyĄ├ļŖ║¾Ż¼Š═åóäėČ©ĢrŲ„ėŗĢrŻ¼│ų└mę╗Č©Ģrķg╝┤šJČ©×ķęčĮøŖAŠoĪŻ═¼śėŻ¼Ę┼╦╔▓┘ū„ę▓╩Ūė╔Č©ĢrŲ„┐žųŲīŹ¼FĄ─ĪŻ¼Fę¬Ū¾═Ļ│╔PLCė├ė┌ÖCąĄ╩ų┐žųŲĄ─│╠ą“įOėŗĪŻÖCąĄ╩ųĄ─╣żū„▀^│╠╚ńŽ┬Ż║
(1)ÖCąĄ╩ų╬╗ė┌│§╩╝╬╗ų├Ż©ē║║ŽSQ2ĪóSQ4Ż®ĢrŻ¼░┤Ž┬åóäė░┤ŌoSBŻ¼Ž┬ĮĄļŖ┤┼ķyYV1Ą├ļŖŻ¼ÖCąĄ╩ųŽ┬ĮĄų▒ų┴ē║║ŽSQ1×ķų╣ĪŻ
(2)ŖAŠoļŖ┤┼ķyYV2Ą├ļŖŻ¼═¼ĢråóäėČ©ĢrŲ„Ż¼2.3s║¾╣ż╝■ŖAŠoĪŻ
(3)╔Ž╔²ļŖ┤┼ķyYV3Ą├ļŖŻ¼ÖCąĄ╩ųūźŲ╣ż╝■╔Ž╔²Ż¼ų▒ų┴ē║║ŽSQ2×ķų╣ĪŻ
(4)ÖCąĄ╩ųėęęŲļŖ┤┼ķyYV4Ą├ļŖŻ¼ÖCąĄ╩ųėęęŲų▒ų┴ē║║ŽSQ3ĪŻ
(5)YV1Ą├ļŖŻ¼ÖCąĄ╩ųŽ┬ĮĄų▒ų┴ē║║ŽSQ1ĪŻ
(6)ŖAŠoļŖ┤┼ķyYV2╩¦ļŖŻ¼Ę┼╣ż╝■ĄĮB┼_Ż¼2s║¾šJČ©ęčĘ┼╦╔ĪŻ
(7)YV3Ą├ļŖŻ¼ÖCąĄ╩ų╔Ž╔²Ż¼ų▒ų┴ē║║ŽSQ2ĪŻ
(8)ÖCąĄ╩ųŽ“ū¾ļŖ┤┼ķyYV5Ą├ļŖŻ¼ÖCąĄ╩ųū¾ęŲŻ¼ų▒ų┴ē║║ŽSQ4Ż¼ÖCąĄ╩ų╗žĄĮįŁ³cŻ¼═Ļ│╔ę╗éĆ裣hĪŻ
Ž┬├µĖ∙ō■╔Ž╩÷ę¬Ū¾įOėŗÖCąĄ╩ų┐žųŲĄ─PLC│╠ą“ĪŻ
(1)Ė∙ō■┐žųŲę¬Ū¾Ż¼«ŗ│÷Ēśą“╣”─▄łDŻ¼╚ńłD7-28╦∙╩ŠŻ¼┐žųŲ▀^│╠×ķå╬ę╗Ēśą“▀^│╠ĪŻ
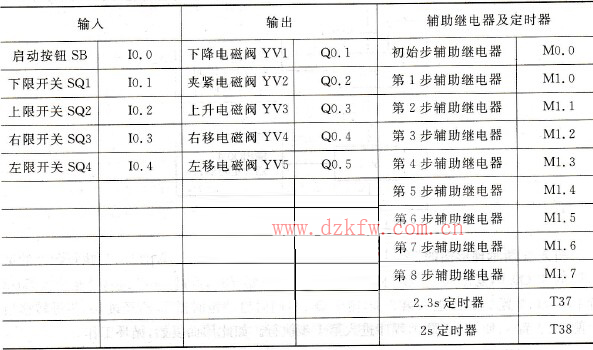
(2)▀MąąI/OĘų┼õŻ¼╚ń▒Ē7-10╦∙╩ŠĪŻĖ∙ō■▌ö╚ļ5³cĪó▌ö│÷5³cŻ¼▀xō±S7 CPU222 AC/DC/└^ļŖŲ„ą═ĪŻ
(3)Ė∙ō■Ēśą“╣”─▄łDŻ¼«ŗ│÷╠▌ą╬łDŻ¼╚ńłD7-29╦∙╩ŠĪŻ
łD7-28 ÖCąĄ╩ų┐žųŲĒśą“╣”─▄łD
łD7-29 ÖCąĄ╩ų┐žųŲ╠▌ą╬łD│╠ą“
▒Ē7-10 ÖCąĄ╩ų┐žųŲĄ─I/OĘų┼õ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū