
1. ą┬╣”─▄ĮŌūx
S7-200 SMART CPUūį├µ╩└ęįüĒŻ¼æ{ĮĶŲõā×(y©Łu)ąŃĄ─ąį─▄╩▄ĄĮ┴╦ė├æ¶Ą─ÅVĘ║║├įu(p©¬ng)ĪŻ2022─Ļ9į┬6╚šŻ¼V2.7╣╠╝■š²╩Į░l(f©Ī)▓╝Ż¼Ž┬├µ×ķ┤¾╝ęĮķĮBę╗Ž┬ą┬░µ▒Šėą╩▓├┤╠ž³c(di©Żn)Ż¼į÷╝ė┴╦──ą®ą┬╣”─▄ĪŻ
1.1 │¼±Y╣”─▄
Ė┼─ŅŻ║│¼±Y╩ŪųĖ▀\(y©┤n)äė(d©░ng)┐žųŲųĖ┴Ņų«ķgŽÓ╗źĖ▓╔wĄ─ŪķørŻ¼ė├æ¶┐╔ęįė├ą┬Ą─ųĖ┴ŅĖ▓╔wš²į┌ł╠(zh©¬)ąąĄ─├³┴ŅŻ¼│¼±Y╣”─▄ę╗Ą®╝ż╗ŅīóĢ■(hu©¼)ųąų╣«ö(d©Īng)Ū░äė(d©░ng)ū„▓ó┴ó╝┤ł╠(zh©¬)ąąą┬Ą─├³┴ŅĪŻ
ā×(y©Łu)³c(di©Żn)Ż║▌S▓╗ė├═Żų╣Ż¼┐╔ęįŲĮ╗¼▀^Č╔ĄĮą┬Ą─ųĖ┴Ņ╗“╩Ū═¼ę╗ųĖ┴ŅĄ─ą┬ģóöĄ(sh©┤)ĪŻ
╣”─▄šf├„Ż║S7-200 SMART V2.7─┐Ū░āHų¦│ųį┌ŽÓ═¼ųĖ┴Ņķgė|░l(f©Ī)│¼±YĒææ¬(y©®ng)ĪŻų¦│ųā╔ĘNųĖ┴ŅŻ║ę╗ĘN╩Ū═©▀^▀\(y©┤n)äė(d©░ng)┐žųŲŽ“?q©▒)¦ĘĮ╩Į╔·│╔Ą─AXISx_GOTOųĖ┴ŅŻ¼┴Ē═Ōę╗ĘN╩Ū═©▀^PLSųĖ┴ŅĪŻ
AXISx_GOTOųĖ┴Ņ
Īż ų¦│ųĄ─▀\(y©┤n)äė(d©░ng)─Ż╩ĮŻ║
ī”(du©¼)ė┌AXISx_GOTOųĖ┴ŅŻ¼āHį┌Į^ī”(du©¼)▀\(y©┤n)äė(d©░ng)─Ż╩Į║═ŽÓī”(du©¼)▀\(y©┤n)äė(d©░ng)─Ż╩Įų¦│ų│¼±Y╣”─▄Ż¼
ā╔ĘN▀\(y©┤n)äė(d©░ng)─Ż╩Įų«ķg┐╔ęįŽÓ╗źė|░l(f©Ī)│¼±YĒææ¬(y©®ng)Ż¼═¼ę╗éĆ(g©©)─Ż╩ĮĄ─ųĖ┴Ņę▓┐╔ęįŽ╚║¾╝ż╗Ņęįė|░l(f©Ī)│¼±YĒææ¬(y©®ng)ĪŻ
Īż ė|░l(f©Ī)│¼±YĄ─ĘĮ╩ĮŻ║
š²į┌ł╠(zh©¬)ąąĄ─AXISx_GOTOųĖ┴Ņį┘┤╬═©▀^START╣▄─_╔Ž╔²čž▒╗╝ż╗ŅŻ╗
š²į┌ł╠(zh©¬)ąąAXISx_GOTOųĖ┴ŅĢr(sh©¬)Ż¼╝ż╗Ņ┴Ēę╗éĆ(g©©)AXISx_GOTOųĖ┴ŅĪŻ
Īż ┐╔š{(di©żo)š¹Ą─ģóöĄ(sh©┤)Ż║
│¼±Y╣”─▄┐╔ė├ė┌Ė³Ė─š²į┌▀\(y©┤n)ąąĄ─AXISx_GOTOųĖ┴ŅĄ─╦┘Č╚Īó╬╗ų├║═▀\(y©┤n)äė(d©░ng)─Ż╩ĮŻ¼(āHų¦│ų─Ż╩Į0 ║═─Ż╩Į1)ĪŻ
Īż │¼±Yė|░l(f©Ī)║¾Ą─▀^│╠Ż║
╚ń╣¹╦┘Č╚ęčĖ³Ė─Ż¼CPU īó╝ė╦┘╗“£p╦┘Ż¼ęį▀_(d©ó)ĄĮą┬Ą──┐ś╦(bi©Īo)╦┘Č╚Ż╗
╚ń╣¹▀\(y©┤n)äė(d©░ng)ĘĮŽ“Ė─ūāŻ¼CPU īó£p╦┘ų┴═Żų╣Ż¼╚╗║¾į┘čžĖ³Ė─Ą─ĘĮŽ“▀\(y©┤n)äė(d©░ng)Ż╗
│¼±YųąĄ─¤oą¦ĮMæB(t©żi)Ż¼īó┤“öÓ«ö(d©Īng)Ū░Ą─▀\(y©┤n)äė(d©░ng)Ż©▒╚╚ńą┬Ą─AXISx_GOTOųĖ┴Ņ×ķĮ^ī”(du©¼)▀\(y©┤n)äė(d©░ng)─Ż╩ĮŻ¼ Ą½ė|░l(f©Ī)ųĖ┴Ņų«Ū░╬┤Į©┴óģó┐╝³c(di©Żn)Ż®ĪŻ
PLS ųĖ┴Ņ
Īż ų¦│ųĄ──Ż╩ĮŻ║
PLSųĖ┴ŅųąāHPTOå╬Č╬─Ż╩Įų¦│ų│¼±YĒææ¬(y©®ng)ĪŻ
Īż ė|░l(f©Ī)│¼±YĄ─ĘĮ╩ĮŻ║
PTO┐žųŲūų╣Ø(ji©”)(SMB67ĪóSMB77 ║═SMB567) ųą╩╣─▄│¼±YĒææ¬(y©®ng)Ż¼═©▀^╔Ž╔²čžųžą┬╝ż╗Ņš²į┌▀\(y©┤n)ąąĄ─ PLS ųĖ┴ŅĪŻ
═©▀^į┌PTO ┐žųŲūų╣Ø(ji©”) (SMB67ĪóSMB77 ║═SMB567) ųą╩╣─▄│¼±YĒææ¬(y©®ng)Ż¼╝ż╗Ņ┴Ēę╗éĆ(g©©) PLS ųĖ┴ŅĪŻ
Īż ┐╔š{(di©żo)š¹Ą─ģóöĄ(sh©┤)Ż║
│¼±Y╣”─▄┐╔ė├ė┌Ė³Ė─š²į┌▀\(y©┤n)ąąĄ─ PLS ųĖ┴ŅĄ─Ņl┬╩║═├}ø_ėŗ(j©¼)öĄ(sh©┤)ĪŻ
1.2 ▀\(y©┤n)äė(d©░ng)▌SĮM
V2.7ų«Ū░╣╠╝■░µ▒ŠĄ─S7-200SMARTāHų¦│ųå╬▌SĄ─▀\(y©┤n)äė(d©░ng)Ż¼ī”(du©¼)ė┌ČÓ▌Sų«ķgĄ─ģf(xi©”)š{(di©żo)┬ō(li©ón)äė(d©░ng)ąĶꬊÄ│╠īŹ(sh©¬)¼F(xi©żn)ĪŻ└²╚ńąĶę¬īó─Š▓─╝ė╣ż│╔Å═(f©┤)ļsĄ─ČÓ▀ģą╬Ż¼Š═ąĶę¬╚²▌S┼õ║Ž═Ļ│╔ĪŻ
STEP 7‑Micro/WIN SMART V2.7 ▄ø╝■┼õ║ŽS7-200 SMART V2.7 CPU ╣╠╝■ų¦│ų╗∙ė┌PTOŻ©├}ø_┤«▌ö│÷Ż®ķ_Łh(hu©ón)Ą─2D/3Dų▒ŠĆ▓Õča(b©│)▀\(y©┤n)äė(d©░ng)╣”─▄ĪŻ
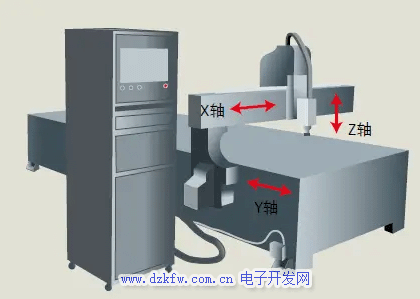
łD1 ─Š╣żÖC(j©®)ąĄčbų├
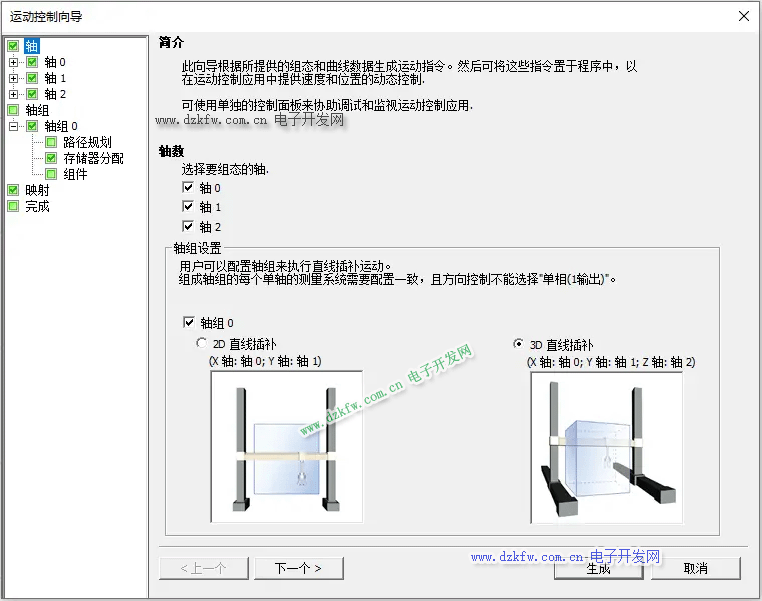
╣”─▄šf├„Ż║═©▀^▀\(y©┤n)äė(d©░ng)┐žųŲŽ“?q©▒)¦▌SĮM╣”─▄Ż¼īŹ(sh©¬)¼F(xi©żn)2▌S╗“š▀3▌SĄ─ų▒ŠĆ▓Õča(b©│)▀\(y©┤n)äė(d©░ng)ĪŻ▌SĮMė╔▌SĮM│╔Ż¼▌SĮM║═▌SĄ─ĻP(gu©Īn)ŽĄ╩ŪņoæB(t©żi)Ą─Ż¼▓╗ų¦│ųäė(d©░ng)æB(t©żi)┼õų├ĪŻ
īŹ(sh©¬)¼F(xi©żn)ĘĮ╩ĮŻ║į┌▀\(y©┤n)äė(d©░ng)┐žųŲŽ“?q©▒)¦ųą┼õų├▌SĮM║¾Ż¼ėąā╔ĘNĘĮ╩Į┐╔ęįī”(du©¼)▌SĮM▀M(j©¼n)ąą▓┘ū„ĪŻ
Ą┌ę╗ĘN╩Ū┼õų├▌SĮM║¾Ż¼▓╗ī”(du©¼)▌SĮM▀M(j©¼n)ąą┬ĘÅĮęÄ(gu©®)äØĪŻĄ┌Č■ĘN╩Ū┼õų├▌SĮM║¾Ż¼ī”(du©¼)▌SĮM▀M(j©¼n)ąą┬ĘÅĮęÄ(gu©®)äØĪŻ
─┐Ū░ų╗ėąę╗éĆ(g©©)▌SĮM┐╔ęį╩╣ė├Ż¼▌SĮMĄ─X ▌Sī”(du©¼)æ¬(y©®ng)▌S0Ż¼▌SĮMĄ─Y ▌Sī”(du©¼)æ¬(y©®ng)▌S1Ż¼▌SĮMĄ─Z ▌S(╚ń╣¹▀mė├)ī”(du©¼)æ¬(y©®ng)▌S2ĪŻ
Īż ┼õų├▌SĮM║¾Ż¼▓╗ī”(du©¼)▌SĮM▀M(j©¼n)ąą┬ĘÅĮęÄ(gu©®)äØ
╩╣ė├▀\(y©┤n)äė(d©░ng)Ž“?q©▒)¦ĮMæB(t©żi)▌SĮMŻ¼ūįäė(d©░ng)╔·│╔Ą─GRP0_2/3D_MOVELINEARųĖ┴ŅŻ¼įōųĖ┴Ņ┐žųŲ▌SĮMīŹ(sh©¬)¼F(xi©żn)Å─īŹ(sh©¬)ļH╬╗ų├ĄĮ─┐ś╦(bi©Īo)╬╗ų├Ą─ 2D/3D ų▒ŠĆ▓Õča(b©│)▀\(y©┤n)äė(d©░ng)ĪŻ
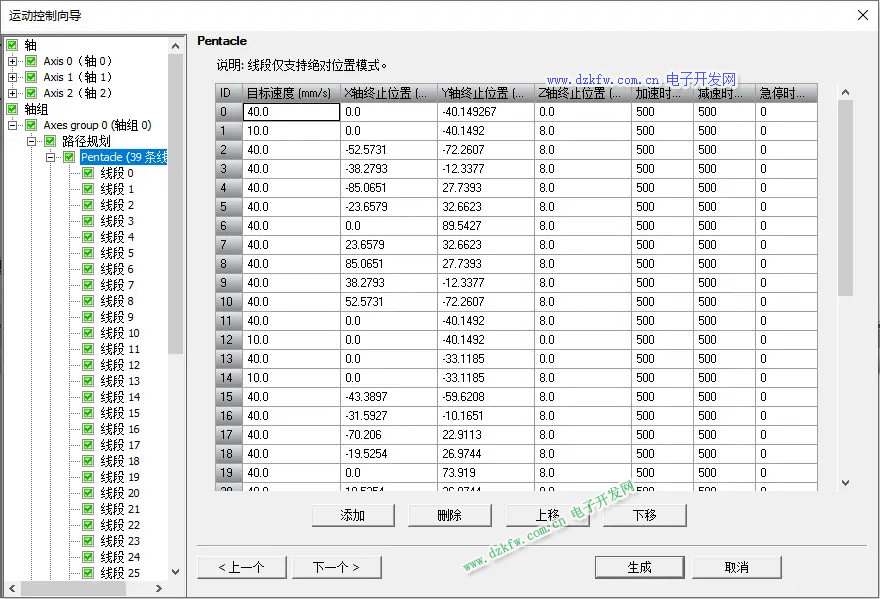
łD2 ┼õų├▌SĮM

łD3 GRP0_2/3D_MOVELINEARųĖ┴Ņ
Īż ┼õų├▌SĮM║¾Ż¼ī”(du©¼)▌SĮM▀M(j©¼n)ąą┬ĘÅĮęÄ(gu©®)äØ
╩╣ė├▀\(y©┤n)äė(d©░ng)Ž“?q©▒)¦ĮMæB(t©żi)▌SĮMŻ¼▓óį┌Ž“?q©▒)¦ųąī?du©¼)▌SĮMĄ─▀\(y©┤n)äė(d©░ng)┬ĘÅĮ▀M(j©¼n)ąąęÄ(gu©®)äØŻ¼╩╣ė├Ž“?q©▒)¦╔·│╔Ą─GRP0_MOVEPATHųĖ┴Ņė|░l(f©Ī)Ž“?q©▒)¦ųąę?gu©®)äØĄ─┬ĘÅĮĪŻ▌SĮMĄ─┬ĘÅĮęÄ(gu©®)äØ╣”─▄┐╔┼õų├Ą─┬ĘÅĮūŅČÓ×ķ128ŚlŻ¼▌SĮM┬ĘÅĮęÄ(gu©®)äØ╣”─▄āH▀mė├ė┌Į^ī”(du©¼)▀\(y©┤n)äė(d©░ng)─Ż╩ĮĪŻ
łD4 ī”(du©¼)▌SĮM▀M(j©¼n)ąą┬ĘÅĮęÄ(gu©®)äØ
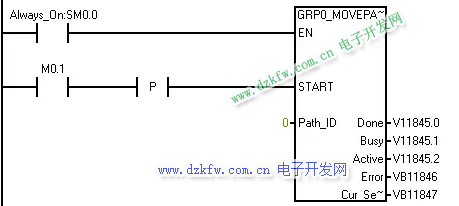
łD5 GRP0_MOVEPATHųĖ┴Ņ
1.3 ė├æ¶ūįČ©┴xWebĮń├µ
╣”─▄šf├„Ż║STEP 7‑Micro/WIN SMART V2.7▄ø╝■┼õ║ŽS7-200 SMART V2.7 CPU ╣╠╝■į÷╝ė┴╦Web Ę■äš(w©┤)Ų„ė├æ¶ūįČ©┴xWebĒō├µ╣”─▄ĪŻ└¹ė├ SMART Web Editor╣żŠ▀Ż¼ė├æ¶┐╔äō(chu©żng)Į©ūįČ©┴xWebĒō├µĒŚ(xi©żng)─┐Ż¼▓óīóįōĒŚ(xi©żng)─┐Ž┬▌dĄĮ CPU«ö(d©Īng)ųąĪŻ

łD6 SMART Web Editor ĮMæB(t©żi)Įń├µ
ā×(y©Łu)³c(di©Żn)Ż║═©▀^SMART Web Editor ĮMæB(t©żi)╣żŠ▀Ż¼┐╔ęį┐ņ╦┘Ą─ķ_░l(f©Ī)╗∙ė┌WebĄ─╚╦ÖC(j©®)Įń├µŻ¼░┤ŌoĪóāx▒Ē▒PĪó┌ģä▌(sh©¼)łDĄ╚┐ž╝■┐╔ęįØMūŃ╗∙▒ŠĄ─╩╣ė├ę¬Ū¾Ż¼┤¾┤¾Ą─┐sČ╠«a(ch©Żn)ŲĘķ_░l(f©Ī)ų▄Ų┌ĪŻ
1.4 Web APIŻ©æ¬(y©®ng)ė├│╠ą“ŠÄ│╠Įė┐┌Ż®
╣”─▄šf├„Ż║STEP 7‑Micro/WIN SMART V2.7▄ø╝■┼õ║ŽS7-200 SMART V2.7 CPU╣╠╝■į÷╝ė┴╦Web API╣”─▄Ż¼×ķė├æ¶╠ß╣®┴╦Å─ĮKČ╦įO(sh©©)éõūx╚Ī║═īæ╚ļ CPUöĄ(sh©┤)ō■(j©┤)Ą─Įė┐┌ĪŻ║åå╬Ą─šfŻ¼Š═╩Ū▓╗╩╣ė├SMART Web EditorĮMæB(t©żi)╣żŠ▀Ż¼ūįąąķ_░l(f©Ī)ŠW(w©Żng)Ēō╗“š▀æ¬(y©®ng)ė├│╠ą“Ż¼└¹ė├Web APIįLå¢CPUöĄ(sh©┤)ō■(j©┤)ĪŻ

łD7 CPU ═©▀^ęį╠½ŠW(w©Żng)Č╦┐┌ų¦│ų Web API╣”─▄
2 «a(ch©Żn)ŲĘėåžøą┼Žó
ęį╔Žā╚(n©©i)╚▌Š═╩Ū▒Š┤╬S7-200 SMART V2.7 CPU╣╠╝■ą┬į÷╣”─▄Ą─┤¾ų┬├Ķ╩÷Ż¼ī”(du©¼)ė┌V2.6╣╠╝■Ą─CPU╚¶╩ŪąĶę¬╩╣ė├ęį╔Ž╣”─▄Ż¼ąĶę¬īó╣╠╝■╔²╝ē(j©¬)ĄĮV2.7░µ▒ŠĪŻ
▒ĒĖ±1 V2.7 ╣╠╝■ī”(du©¼)æ¬(y©®ng)Ą─ CPU ą═╠¢(h©żo)

šf├„Ż║
-
╣╠╝■░µ▒Š×ķ V2.7 Ą─ CPU ą═╠¢(h©żo)▓╗─▄ĮĄ╝ē(j©¬)ĄĮ V2.6 ╗“╚╬║╬ęįŪ░Ą─░µ▒ŠĪŻ
-
Ž╚Ū░ėåžø╠¢(h©żo)ęį 0AA0 ĮY(ji©”)╬▓Ą─╚╬║╬ SR ╗“ ST ą═╠¢(h©żo)Č╝▓╗─▄╔²╝ē(j©¬)ĄĮ V2.7ĪŻ
-
ėåžø╠¢(h©żo)ęį 0AA1 ĮY(ji©”)╬▓Ą─ CPU ą═╠¢(h©żo)▓╗─▄ĮĄ╝ē(j©¬)×ķ╚╬║╬ų«Ū░Ą─╣╠╝■░µ▒ŠĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū