
│¼┬Ģ▓©é„ĖąŲ„
│¼┬Ģ▓©╩Ūę╗ĘN│¼│÷╚╦ŅÉ┬ĀėXśOŽ▐Ą─┬Ģ▓©╝┤Ųõš±äėŅl┬╩Ė▀ė┌20 kHzĄ─ÖCąĄ▓©ĪŻ│¼┬Ģ▓©é„ĖąŲ„į┌╣żū„Ą─Ģr║“Š═╩ŪīóļŖē║║═│¼┬Ģ▓©ų«ķgĄ─╗źŽÓ▐D(zhu©Żn)ōQŻ¼«ö│¼┬Ģ▓©é„ĖąŲ„░l(f©Ī)╔õ│¼┬Ģ▓©ĢrŻ¼░l(f©Ī)╔õ│¼┬Ģ▓©Ą─╠ĮŅ^īóļŖē║▐D(zhu©Żn)╗»Ą─│¼┬Ģ▓©░l(f©Ī)╔õ│÷╚źŻ¼«öĮė╩š│¼┬Ģ▓©ĢrŻ¼│¼┬Ģ▓©Įė╩š╠ĮŅ^īó│¼┬Ģ▓©▐D(zhu©Żn)╗»Ą─ļŖē║╗ž╦═ĄĮå╬Ų¼ÖC┐žųŲąŠŲ¼ĪŻ│¼┬Ģ▓©Š▀ėąš±äėŅl┬╩Ė▀Īó▓©ķLČ╠Īó└@╔õ¼F(xi©żn)Ž¾ąĪČ°ŪęĘĮŽ“ąį║├▀Ć─▄ē“×ķĘ┤╔õŠĆČ©Ž“é„▓źĄ╚ā×(y©Łu)³cŻ¼Č°Ūę│¼┬Ģ▓©é„ĖąŲ„Ą──▄┴┐Ž¹║─ŠÅ┬²ėą└¹ė┌£yŠÓĪŻį┌ųąĪóķLŠÓļx£y┴┐ĢrŻ¼│¼┬Ģ▓©é„ĖąŲ„Ą─Š½Č╚║═ĘĮŽ“ąį.Č╝ę¬┤¾┤¾ā×(y©Łu)ė┌╝t═ŌŠĆé„ĖąŲ„Ż¼Ą½ārĖ±ę▓╔į┘FĪŻ
│¼┬Ģ▓©░l(f©Ī)╔õŲ„Ž“─│ę╗ĘĮŽ“░l(f©Ī)╔õ│¼┬Ģ▓©Ż¼į┌░l(f©Ī)╔õĄ─═¼Ģrķ_╩╝ėŗĢrŻ¼│¼┬Ģ▓©į┌┐šÜŌųąé„▓źŻ¼═Šųą┼÷ĄĮšŽĄK╬’Š═┴ó╝┤ĘĄ╗žüĒŻ¼│¼┬Ģ▓©Įė╩šŲ„╩šĄĮĘ┤╔õ▓©Š═┴ó╝┤═Żų╣ėŗĢrĪŻ┬Ģ▓©į┌┐šÜŌųąĄ─é„▓ź╦┘Č╚×ķ340m/sŻ¼Ė∙ō■(j©┤)ėŗĢrŲ„ėøõøĄ─ĢrķgtŻ¼Š═┐╔ęįėŗ╦Ń│÷░l(f©Ī)╔õ³cŠÓšŽĄK╬’Ą─ŠÓļxsŻ¼╝┤Ż║s=340m/sĪ┴ t / 2 ĪŻ▀@Š═╩Ū╦∙ų^Ą─Ģrķg▓Ņ£yŠÓĘ©ĪŻ▒ŠīŹ“×└¹ė├│¼┬Ģ▓©£yĄ├Ą─ŠÓļxÅ─┤«┐┌ųą’@╩ŠĪŻ

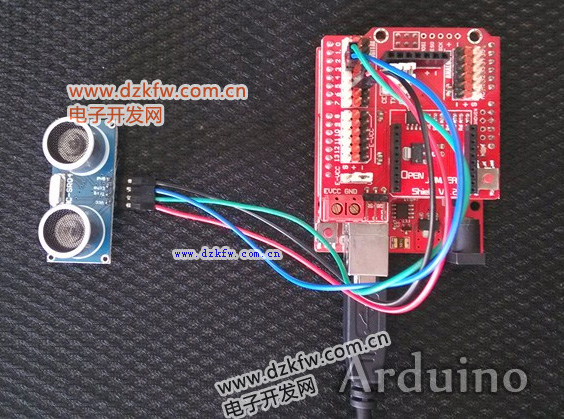
HC-SR04│¼┬Ģ▓©£yŠÓ─ŻēKĄ─öĄ(sh©┤)ō■(j©┤)Įė┐┌╚ń╔ŽłDŻ¼┼cArduino unoĄ─Įė┐┌▀BĮėĘĮĘ©Ż║VCCĮė+5VŻ¼GNDĮėĄžŻ¼TrigĮėöĄ(sh©┤)ūųI/OĮė┐┌5Ż©ę▓┐╔ęį╩ŪŲõ╦³Ż®Ż¼EchoĮėöĄ(sh©┤)ūųI/OĮė┐┌4Ż©ę▓┐╔ęį╩ŪŲõ╦³Ż®ĪŻ
ų¬ūRę¬³cŻ║
/*
╚šŲ┌:2014.10.24
╣”─▄Ż║└¹ė├SR04│¼┬Ģ▓©é„ĖąŲ„▀Mąą£yŠÓŻ¼▓óė├┤«┐┌’@╩Š£y│÷Ą─ŠÓļxųĄ
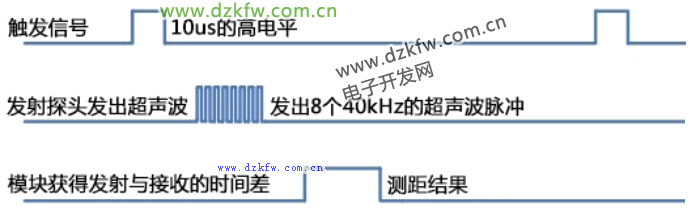
ĘĮ╩ĮŻ║1Īó╩╣ė├Arduino▓╔ė├öĄ(sh©┤)ūųę²─_ĮoSR04Ą─Trigę²─_ų┴╔┘10”╠sĄ─Ė▀ļŖŲĮą┼╠¢Ż¼ė|░l(f©Ī)SR04─ŻēK£yŠÓ╣”─▄Ż╗
2Īóė|░l(f©Ī)║¾Ż¼─ŻēKĢ■ūįäė░l(f©Ī)╦═8éĆ40KHzĄ─│¼┬Ģ▓©├}ø_Ż¼▓óūįäėÖz£y╩Ūʱėąą┼╠¢ĘĄ╗žĪŻ
▀@▓ĮĢ■ė╔─ŻēKā╚(n©©i)▓┐ūįäė═Ļ│╔ĪŻ
3Īó╚ńėąą┼╠¢ĘĄ╗žŻ¼Echoę²─_Ģ■▌ö│÷Ė▀ļŖŲĮŻ¼Ė▀ļŖŲĮ│ų└m(x©┤)Ą─ĢrķgŠ═╩Ū│¼┬Ģ▓©Å─░l(f©Ī)╔õĄĮĘĄ╗žĄ─ĢrķgĪŻ
┤╦ĢrŻ¼╬ęéā─▄╩╣ė├pulseIn()║»öĄ(sh©┤)½@╚ĪĄĮ£yŠÓĄ─ĮY(ji©”)╣¹Ż¼▓óėŗ╦Ń│÷ŠÓ▒╗£y╬’Ą─īŹļHŠÓļxĪŻ
*/
// įO(sh©©)Č©SR04▀BĮėĄ─Arduinoę²─_
const int TrigPin = 2;
const int EchoPin = 3;
const int LedPin = 17;
float distance;
void setup() // │§╩╝╗»┤«┐┌═©ą┼╝░▀BĮėSR04Ą─ę²─_
{
Serial.begin(9600);
pinMode(TrigPin, OUTPUT);
pinMode(TrigPin, OUTPUT);
pinMode(EchoPin, INPUT); // ę¬Öz£yę²─_╔Ž▌ö╚ļĄ─├}ø_īÆČ╚Ż¼ąĶꬎ╚įO(sh©©)ų├×ķ▌ö╚ļĀŅæB(t©żi)
Serial.println("Ultrasonic sensor:");
}
void loop()
{
// «a(ch©Żn)╔·ę╗éĆ10usĄ─Ė▀├}ø_╚źė|░l(f©Ī)TrigPin
digitalWrite(LedPin,HIGH);
delayMicroseconds(2);
digitalWrite(TrigPin,HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin,LOW);
// Öz£y├}ø_īÆČ╚Ż¼▓óėŗ╦Ń│÷ŠÓļx
distance = pulseIn(EchoPin,HIGH);
Serial.print(distance);
Serial.print("ms");
distance = distance/58;
distance = (int(distance*100.0))/100.0; //▒Ż┴¶ā╔╬╗ąĪöĄ(sh©┤)
Serial.print(".....distance is:");
Serial.print(distance);
Serial.print("cm");
Serial.println();
delay(1000);
}
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū