
ȵÖC╩Ūę╗ĘN╬╗ų├Ż©ĮŪČ╚Ż®╦┼Ę■Ą─“īäėŲ„Ż¼▀mė├ė┌─Ūą®ąĶę¬ĮŪČ╚▓╗öÓūā╗»▓ó┐╔ęį▒Ż│ųĄ─┐žųŲŽĄĮyĪŻ─┐Ū░Ż¼į┌Ė▀Ön▀b┐ž═µŠ▀Ż¼╚ń’wÖCĪóØō═¦─Żą═Ż¼▀b┐žÖCŲ„╚╦ųąęčĮøĄ├ĄĮ┴╦Ųš▒ķæ¬ė├ĪŻ▒Š╬─╩ūŽ╚ĮķĮB┴╦ȵÖCĄ─ĮM│╔╝░ĮYśŗįŁ└ĒŻ¼Ųõ┤╬ĮķĮB┴╦ȵÖCĄ─┐žųŲ╝░ūĘļSąįŻ¼ūŅ║¾ĮķĮB┴╦ȵÖCĮėŠĆĘĮĘ©Ż©╚²ŠĆĮėŠĆĘ©Ż®ęį╝░░▓čbĪŻ
ĪĪĪĪȵÖC╩Ūė╔╩▓├┤ĮM│╔Ż¼ČµÖCĄ─ĮM│╔
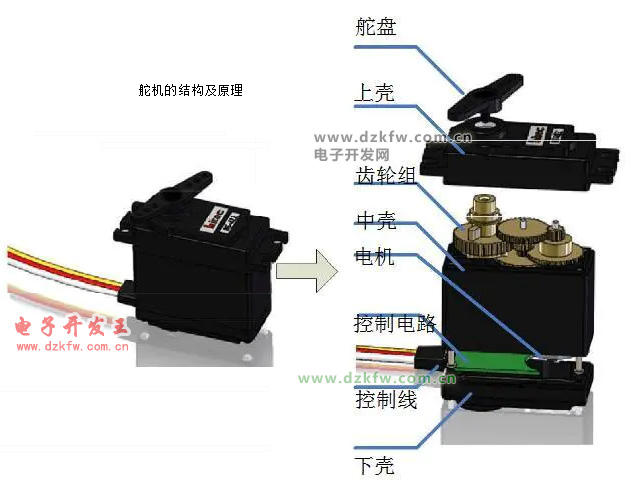
ę╗░ŃüĒųvȵÖCų„ę¬ė╔ęįŽ┬ÄūéĆ▓┐ĘųĮM│╔Ż¼Čµ▒PĪó£p╦┘²X▌åĮMĪó╬╗ų├Ę┤üļŖ╬╗ėŗĪóų▒┴„ļŖÖCĪó┐žųŲļŖ┬ĘĄ╚Ż¼╚ńłD4ĪółD5╦∙╩ŠĪŻ

ĪĪĪĪȵÖCĄ─▌ö╚ļŠĆ╣▓ėą╚²ŚlŻ¼╚ńłD6╦∙╩ŠŻ¼╝t╔½ųąķgŻ¼╩ŪļŖį┤ŠĆŻ¼ę╗▀ģ║┌╔½Ą─╩ŪĄžŠĆŻ¼▀@▌vĖ∙ŠĆĮoȵÖC╠ß╣®ūŅ╗∙▒ŠĄ──▄į┤▒ŻūCŻ¼ų„ę¬╩ŪļŖÖCĄ─▐DäėŽ¹║─ĪŻļŖį┤ėąā╔ĘNęÄĖ±Ż¼ę╗╩Ū4.8VŻ¼ę╗╩Ū6.0VŻ¼ Ęųäeī”æ¬▓╗═¼Ą─▐DŠžś╦£╩Ż¼╝┤▌ö│÷┴”Šž▓╗═¼Ż¼6. OVī”æ¬Ą─ę¬┤¾ę╗ą®Ż¼Š▀¾w┐┤æ¬ė├Śl╝■;┴Ē═Ōę╗Ė∙ŠĆ╩Ū┐žųŲą┼╠¢ŠĆŻ¼Futaba Ą─ę╗░Ń×ķ░ū╔½Ż¼JRĄ─ę╗░Ń×ķĮ█³S╔½ĪŻ┴Ē═Ōę¬ūóęŌę╗³cŻ¼SANWAĄ──│ą®ą═╠¢Ą─ȵÖCę²ŠĆļŖį┤ŠĆį┌▀ģ╔ŽČ°▓╗╩ŪųąķgŻ¼ąĶę¬▒µšJĪŻĄ½ėøūĪ╝t╔½×ķļŖį┤Ż¼║┌╔½×ķĄžŠĆŻ¼ę╗░Ń▓╗Ģ■ĖŃÕeĪŻ

ĪĪĪĪȵÖCĄ─ĮYśŗ╝░įŁ└Ē
ȵÖC░▓čb┴╦ę╗éĆļŖ╬╗Ų„Ż©╗“Ųõ╦³ĮŪČ╚é„ĖąŲ„Ż®Öz£y▌ö│÷▌S▐DäėĮŪČ╚Ż¼┐žųŲ░ÕĖ∙ō■ļŖ╬╗Ų„Ą─ą┼Žó─▄▒╚▌^Š½┤_Ą─┐žųŲ║═▒Ż│ų▌ö│÷▌SĄ─ĮŪČ╚ĪŻ▀@śėĄ─ų▒┴„ļŖÖC┐žųŲĘĮ╩ĮĮąķ]Łh┐žųŲŻ¼╦∙ęįȵÖCĖ³£╩┤_Ą─šf╩Ū╦┼Ę■±R▀_Ż¼ėó╬─ servo.ȵÖCĮM│╔Ż║ ȵ▒PĪó £p╦┘²X▌åĪó ╬╗ų├Ę┤üļŖ╬╗ėŗĪóų▒┴„ļŖÖCĪó ┐žųŲļŖ┬Ę░ÕĄ╚ĪŻ
┐žųŲļŖ┬Ę░ÕĮė╩▄üĒūįą┼╠¢ŠĆĄ─┐žųŲą┼╠¢Ż¼┐žųŲļŖÖC▐DäėŻ¼ļŖÖCĦäėę╗ŽĄ┴ą²X▌åĮMŻ¼£p╦┘║¾é„äėų┴▌ö│÷ȵ▒PĪŻČµÖCĄ─▌ö│÷▌S║═╬╗ų├Ę┤üļŖ╬╗ėŗ╩ŪŽÓ▀BĄ─Ż¼Čµ▒PĪĪ▐DäėĄ─═¼ĢrŻ¼Ä¦äė╬╗ų├Ę┤üļŖ╬╗ėŗŻ¼ļŖ╬╗ėŗīó▌ö│÷ę╗éĆļŖē║ą┼╠¢ĄĮ┐žųŲļŖ┬Ę░ÕŻ¼▀MąąĘ┤üŻ¼╚╗║¾┐žųŲļŖ┬Ę░ÕĖ∙ō■╦∙į┌╬╗ų├øQČ©ļŖÖC▐DäėĄ─ĘĮŽ“║═╦┘Č╚Ż¼Å─Č°▀_ĄĮ─┐ś╦═Żų╣ĪŻ
ĪĪĪĪŲõ╣żū„┴„│╠×ķŻ║┐žųŲą┼╠¢Ī·┐žųŲļŖ┬Ę░ÕĪ·ļŖÖC▐DäėĪ·²X▌åĮM£p╦┘Ī·Čµ▒P▐DäėĪ·╬╗ų├Ę┤üļŖ╬╗ėŗĪ·┐žųŲļŖ┬Ę░ÕĘ┤üĪŻ

ĪĪĪĪȵÖCĄ─┐žųŲ╝░ūĘļSąį
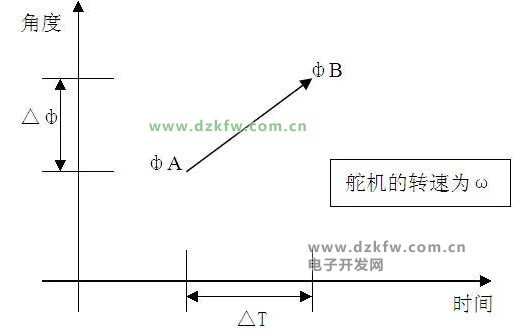
ĪĪĪĪȵÖCĄ─┐žųŲę╗░ŃąĶę¬ę╗éĆ20msū¾ėęĄ─Ģr╗∙├}ø_Ż¼įō├}ø_Ą─Ė▀ļŖŲĮ▓┐Ęųę╗░Ń×ķ0.5ms-2.5msĘČć·ā╚Ą─ĮŪČ╚┐žųŲ├}ø_▓┐ĘųŻ¼┐éķgĖ¶×ķ2msĪŻęį180Č╚ĮŪČ╚╦┼Ę■×ķ└²Ż¼─Ū├┤ī”æ¬Ą─┐žųŲĻPŽĄ╩Ū▀@śėĄ─Ż║
ĪĪĪĪ0.5ms--------------0Č╚Ż╗
ĪĪĪĪ1.0ms------------45Č╚Ż╗
ĪĪĪĪ1.5ms------------90Č╚Ż╗
ĪĪĪĪ2.0ms-----------135Č╚Ż╗
ĪĪĪĪ2.5ms-----------180Č╚Ż╗
ĪĪĪĪȵÖCĄ─ūĘļS╠žąį
╝┘įO¼Fį┌ȵÖCĘĆČ©į┌A³cŻ¼▀@Ģr║“CPU░l│÷ę╗éĆPWMą┼╠¢Ż¼ČµÖC╚½╦┘ė╔A³c▐DŽ“B³cŻ¼į┌▀@éĆ▀^│╠ųąąĶę¬ę╗Č╬ĢrķgŻ¼ČµÖC▓┼─▄▀\äėĄĮB³cĪŻ
ĪĪĪĪ▒Ż│ųĢrķg×ķTŻ„
ĪĪĪĪ«öTŻ„Ī▌Ī„TĢrŻ¼ČµÖC─▄ē“ĄĮ▀_─┐ś╦Ż¼▓óėą╩ŻėÓĢrķgŻ╗
ĪĪĪĪ«öTŻ„Ī▄Ī„TĢrŻ¼ČµÖC▓╗─▄ĄĮ▀_─┐ś╦Ż╗
ĪĪĪĪ└Ēšō╔ŽŻ║«öTŻ„=Ī„TĢrŻ¼ŽĄĮyūŅ▀Bž×Ż¼Č°ŪęȵÖC▀\äėĄ─ūŅ┐ņĪŻ
ĪĪĪĪīŹļH▀^│╠ųąŻ„▓╗▒MŽÓ═¼Ż¼▀Bž×▀\äėĢrĄ─śOŽ▐Ī„T▒╚▌^ļyęįėŗ╦Ń│÷üĒĪŻ
ĪĪĪĪ╝┘╚ń╬ęéāĄ─ȵÖC1DIV =8usŻ¼«öPWMą┼╠¢ęįūŅąĪūā╗»┴┐╝┤Ż©1DIV=8usŻ®ę└┤╬ūā╗»ĢrŻ¼ČµÖCĄ─Ęų▒µ┬╩ūŅĖ▀Ż¼Ą½╩Ū╦┘Č╚Ģ■£p┬²ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū