
舵機(jī)是一種位置(角度)伺服的驅(qū)動器,適用于那些需要角度不斷變化并可以保持的控制系統(tǒng)。目前,在高檔遙控玩具,如飛機(jī)、潛艇模型,遙控機(jī)器人中已經(jīng)得到了普遍應(yīng)用。本文首先介紹了舵機(jī)的組成及結(jié)構(gòu)原理,其次介紹了舵機(jī)的控制及追隨性,最后介紹了舵機(jī)接線方法(三線接線法)以及安裝。
舵機(jī)是由什么組成,舵機(jī)的組成
一般來講舵機(jī)主要由以下幾個部分組成,舵盤、減速齒輪組、位置反饋電位計(jì)、直流電機(jī)、控制電路等,如圖4、圖5所示。

舵機(jī)的輸入線共有三條,如圖6所示,紅色中間,是電源線,一邊黑色的是地線,這輛根線給舵機(jī)提供最基本的能源保證,主要是電機(jī)的轉(zhuǎn)動消耗。電源有兩種規(guī)格,一是4.8V,一是6.0V, 分別對應(yīng)不同的轉(zhuǎn)矩標(biāo)準(zhǔn),即輸出力矩不同,6. OV對應(yīng)的要大一些,具體看應(yīng)用條件;另外一根線是控制信號線,F(xiàn)utaba 的一般為白色,JR的一般為桔黃色。另外要注意一點(diǎn),SANWA的某些型號的舵機(jī)引線電源線在邊上而不是中間,需要辨認(rèn)。但記住紅色為電源,黑色為地線,一般不會搞錯。

舵機(jī)的結(jié)構(gòu)及原理
舵機(jī)安裝了一個電位器(或其它角度傳感器)檢測輸出軸轉(zhuǎn)動角度,控制板根據(jù)電位器的信息能比較精確的控制和保持輸出軸的角度。這樣的直流電機(jī)控制方式叫閉環(huán)控制,所以舵機(jī)更準(zhǔn)確的說是伺服馬達(dá),英文 servo.舵機(jī)組成: 舵盤、 減速齒輪、 位置反饋電位計(jì)、直流電機(jī)、 控制電路板等。
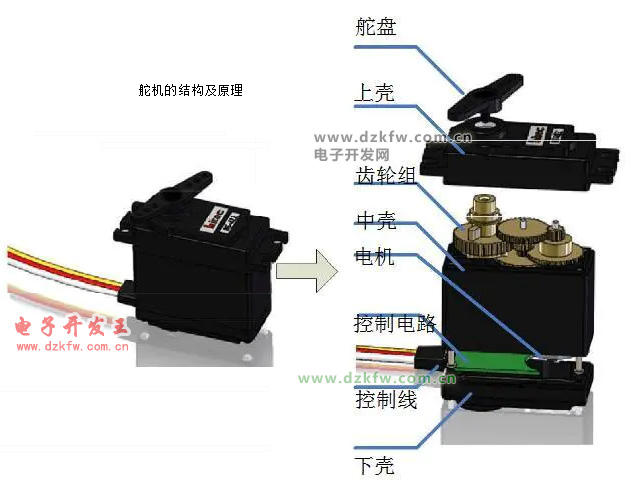
控制電路板接受來自信號線的控制信號,控制電機(jī)轉(zhuǎn)動,電機(jī)帶動一系列齒輪組,減速后傳動至輸出舵盤。舵機(jī)的輸出軸和位置反饋電位計(jì)是相連的,舵盤 轉(zhuǎn)動的同時,帶動位置反饋電位計(jì),電位計(jì)將輸出一個電壓信號到控制電路板,進(jìn)行反饋,然后控制電路板根據(jù)所在位置決定電機(jī)轉(zhuǎn)動的方向和速度,從而達(dá)到目標(biāo)停止。
其工作流程為:控制信號→控制電路板→電機(jī)轉(zhuǎn)動→齒輪組減速→舵盤轉(zhuǎn)動→位置反饋電位計(jì)→控制電路板反饋。

舵機(jī)的控制及追隨性
舵機(jī)的控制一般需要一個20ms左右的時基脈沖,該脈沖的高電平部分一般為0.5ms-2.5ms范圍內(nèi)的角度控制脈沖部分,總間隔為2ms。以180度角度伺服為例,那么對應(yīng)的控制關(guān)系是這樣的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
舵機(jī)的追隨特性
假設(shè)現(xiàn)在舵機(jī)穩(wěn)定在A點(diǎn),這時候CPU發(fā)出一個PWM信號,舵機(jī)全速由A點(diǎn)轉(zhuǎn)向B點(diǎn),在這個過程中需要一段時間,舵機(jī)才能運(yùn)動到B點(diǎn)。
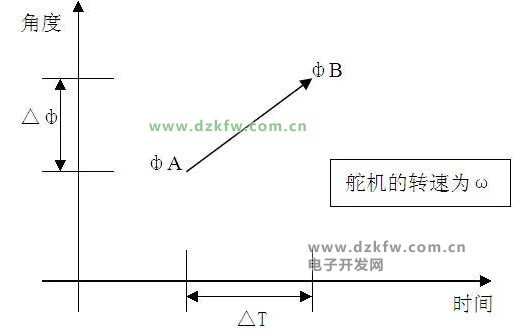
保持時間為Tw
當(dāng)Tw≥△T時,舵機(jī)能夠到達(dá)目標(biāo),并有剩余時間;
當(dāng)Tw≤△T時,舵機(jī)不能到達(dá)目標(biāo);
理論上:當(dāng)Tw=△T時,系統(tǒng)最連貫,而且舵機(jī)運(yùn)動的最快。
實(shí)際過程中w不盡相同,連貫運(yùn)動時的極限△T比較難以計(jì)算出來。
假如我們的舵機(jī)1DIV =8us,當(dāng)PWM信號以最小變化量即(1DIV=8us)依次變化時,舵機(jī)的分辨率最高,但是速度會減慢。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底