
ŠW╔Žī”▀@ę╗ų„Ņ}ėą║▄ČÓ╗ž┤Ż¼Ą½Č╝šfĄ├║▄Ų¼├µŻ¼Į±╠ņ╬ęéāŠ═Å─╦┼Ę■ļŖÖC┼c▓Į▀MļŖÖCūŅ┤¾Ą─ģ^äeüĒšJūR╦³éāŻ¼ų╗ėąī”╦┼Ę■ļŖÖC┼c▓Į▀MļŖÖCėą╔Ņ╚ļĄ─┴╦ĮŌŻ¼╬ęéā▓┼─▄Ė³║├Ąž▀xō±▀m║Ž▓╗═¼╣żørĄ─╣żśIŁhŠ│ĪŻ
╩ūŽ╚Ż¼ąĪŠÄüĒ║═┤¾╝ęę╗ŲüĒ┴╦ĮŌ╦┼Ę■ļŖäėÖC║═▓Į▀MļŖäėÖCĄ─ā╚▓┐ĮYśŗŻ║
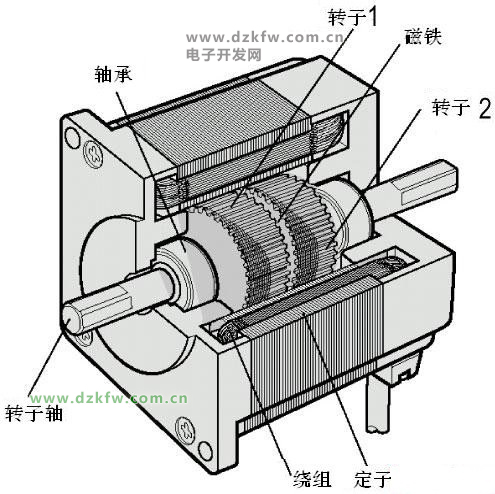
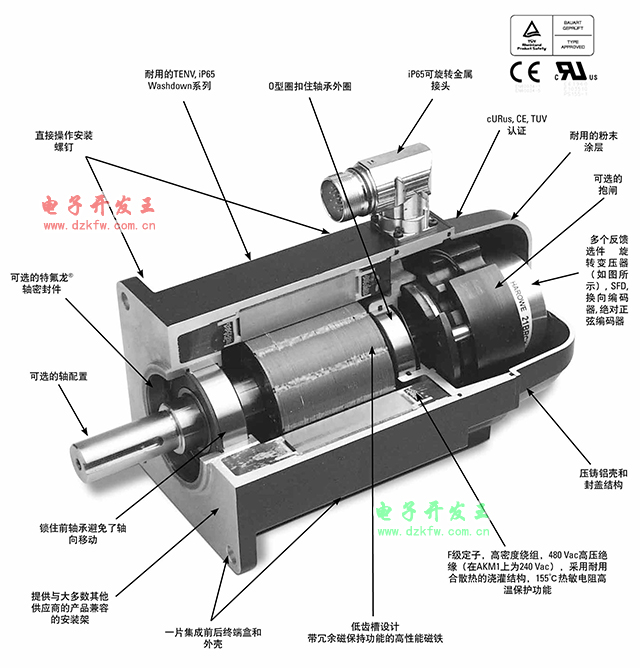
Å─ĮYśŗłD╔Ž┐╔ęį▒╚▌^ų▒ė^Ąž┴╦ĮŌ╦┼Ę■ļŖÖC║═▓Į▀MļŖÖCŻ¼Ž┬├µ╬ęéāÅ─ęįŽ┬ÄūéĆĘĮ├µüĒ┴╦ĮŌā╔š▀ų«ķgĄ─ūŅ┤¾▓ŅäeĪŻ
1Īó▓╗═¼Ą─┐žųŲŠ½Č╚
ā╔ŽÓ╗ņ║Ž▓Į▀MļŖäėÖCĄ─▓ĮŠÓĮŪę╗░Ń×ķ3.6ĪŃŻ¼1.8ĪŃŻ╗╬ÕŽÓ╗ņ║Ž▓Į▀MļŖäėÖCĄ─▓ĮŠÓĮŪę╗░Ń×ķ0.72ĪŃŻ¼0.36ĪŃĪŻ▀Ćėąę╗ą®Ė▀ąį─▄Ą─▓Į▀MļŖÖCŻ¼▓ĮŠÓĮŪČ╚▌^ąĪĪŻ▀@ĘN▓ĮŠÓĮŪ┐╔┼cĄ┬ć°░┘Ė±└Ł╣½╦Š(BERGER LAHR)╔·«aĄ─╚²ŽÓ╗ņ║Ž╩Į▓Į▀MļŖÖCŽÓ╝µ╚▌Ż¼▓ĮŠÓĮŪ┐╔įOų├×ķ1.8ĪŃĪó0.9ĪŃĪó0.72ĪŃĪó0.36ĪŃĪó0.18ĪŃĪó0.09ĪŃĪó0.072ĪŃĪó0.036ĪŃ║═0.036ĪŃŻ¼┼c╦─═©╣½╦Š╔·«aĄ─▓ĮŠÓĮŪŽÓ╚▌ĪŻ
ļŖÖC▌S║¾Č╦Ą─ą²▐DŠÄ┤aŲ„▒ŻūC┴╦Į╗┴„╦┼Ę■ļŖÖCĄ─┐žųŲŠ½Č╚ĪŻŠ═╦╔Ž┬╚½öĄūųĮ╗┴„╦┼Ę■ļŖÖCČ°čįŻ¼ė╔ė┌“īäėŲ„ā╚▓┐▓╔ė├┴╦╦─▒ČŅl╝╝ągŻ¼╦∙ęįī”Ħ2500ŠĆś╦£╩ŠÄ┤aŲ„Ą─ļŖÖCŻ¼Ųõ├}ø_«ö┴┐×ķ360ĪŃ/10000=0.036ĪŃĪŻī”Š▀ėą17╬╗ŠÄ┤aŲ„Ą─±R▀_üĒšfŻ¼├┐éĆ“īäėŲ„Įė╩š217=131072éĆ├}ø_±R▀_ą²▐DŻ¼ę▓Š═╩ŪšfŻ¼╦³Ą─├}ø_«ö┴┐╩Ū360ĪŃ/131072=9.89├ļĪŻ╝┤1/655▓ĮŠÓĮŪ×ķ1.8ĪŃĄ─▓Į▀MļŖÖC├}ø_«ö┴┐ĪŻ
╦³
2ĪóĄ═Ņl╠žąį▓╗═¼
▓Į▀MļŖÖCĄ═╦┘ĢrŻ¼╚▌ęū░l╔·Ą═Ņlš±äėĪŻš±Ņl┼cžō▌dĀŅør╝░“īäėąį─▄ėąĻPŻ¼ę╗░ŃšJ×ķš±Ņl╩ŪļŖäėÖC┐š▌dĢrŲ╠°Ņl┬╩Ą─ę╗░ļĪŻ▀@ę╗Ą═Ņlš±äė¼FŽ¾Ż¼╩Ūė╔▓Į▀MļŖÖCĄ─╣żū„įŁ└ĒøQČ©Ą─Ż¼ī”ÖCŲ„Ą─š²│Ż▀\ąąĘŪ│Ż▓╗└¹ĪŻ▓Į▀MļŖÖCį┌Ą═╦┘▀\ąąĢrŻ¼ę╗░Ńæ¬▓╔ė├ūĶ─ß╝╝ągŻ¼╚ńį┌ļŖÖC╔Ž╝ėūĶ─ßŲ„Ż¼╗“į┌“īäė╔Ž╝ė£pš±Ų„Ą╚Ż¼ęį┐╦Ę■Ą═Ņlš±äė¼FŽ¾ĪŻ
Į╗┴„╦┼Ę■ļŖÖC▀\ąą╩«ĘųŲĮĘĆŻ¼Ą═╦┘▀\ąąĢrę▓¤oš±äė¼FŽ¾ĪŻįōŽĄĮyŠ▀ėąųCš±ęųųŲ╣”─▄Ż¼┐╔ęįĮŌøQÖCąĄäéČ╚▓╗ūŃĄ─å¢Ņ}Ż¼═¼ĢrįōŽĄĮyā╚▓┐▀ĆŠ▀ėąŅl┬╩ĮŌ╬÷ÖC─▄(FFT)Ż¼═©▀^ FFT┐╔ęįÖz£yÖCąĄĄ─╣▓š±³cŻ¼▒Ńė┌ŽĄĮyš{╣ØĪŻ
3Īó▓╗═¼ŠžŅl╠žąį
▓Į▀MļŖÖCĄ─▌ö│÷▐DŠžļSų°▐D╦┘Ą─╠ßĖ▀Č°£pąĪŻ¼į┌▌^Ė▀▐D╦┘Ž┬▐DŠžĢ■╝▒äĪ£pąĪŻ¼ę“┤╦ŲõūŅĖ▀╣żū„▐D╦┘ę╗░Ńį┌300~600 RPMų«ķgĪŻĮ╗┴„╦┼Ę■ļŖÖC▌ö│÷║ŃČ©┴”ŠžŻ¼╝┤į┌║ŃČ©▐D╦┘(═©│Ż╩Ū2000 RPM╗“3000 RPM)ĘČć·ā╚Š∙┐╔▌ö│÷║ŃČ©┴”ŠžŻ¼į┌║ŃČ©▐D╦┘ęį╔ŽŠ∙┐╔▌ö│÷║ŃČ©╣”┬╩ĪŻ
4Īó▓╗═¼▀^▌d─▄┴”
▓Į▀MļŖÖCę╗░Ńø]ėą▀^▌dĄ──▄┴”ĪŻŠ▀ėą▌^ÅŖ▀^▌d─▄┴”Ą─Į╗┴„╦┼Ę■ļŖÖCĪŻū„×ķę╗éĆ└²ūėŻ¼╦╔Ž┬Į╗┴„╦┼Ę■ŽĄĮyŠ▀ėą╦┘Č╚▀^▌d║═┴”Šž▀^▌dĄ─╠žąįĪŻ╦³Ą─ūŅ┤¾┼żŠž╩ŪŅ~Č©┼żŠžĄ─╚²▒ČŻ¼┐╔ęįė├üĒ┐╦Ę■åóäėĢræTąįžō▌d╦∙«a╔·Ą─┼żŠžĪŻ▓Į▀MļŖäėÖCė╔ė┌ø]ėą▀@śėĄ─▀^▌d─▄┴”Ż¼į┌▀xą═Ģr×ķ┴╦┐╦Ę■▀@ĘNæTąį┴”ŠžŻ¼═∙═∙ąĶę¬▀xō±▌^┤¾▐DŠžĄ─ļŖÖCŻ¼Č°į┌š²│Ż▀\ąąųąŻ¼ļŖäėÖC▓╗ąĶę¬▀@├┤┤¾Ą─▐DŠžŻ¼Š═Ģ■│÷¼F└╦┘M┴”ŠžĄ─¼FŽ¾ĪŻ
5Īó▓╗═¼▀\ąąąį─▄
▓Į▀MļŖÖCĄ─┐žųŲ▓╔ė├ķ_Łh┐žųŲŻ¼åóäėŅl┬╩▀^Ė▀╗“žō▌d▀^┤¾╚▌ęū░l╔·üG▓Į╗“Č┬▐DŻ¼═Żų╣Ģr▐D╦┘▀^Ė▀╚▌ęū░l╔·▀^ø_¼FŽ¾Ż¼ę“┤╦Ż¼æ¬╠Ä└Ē║├╔²ĪóĮĄ╦┘Č╚å¢Ņ}Ż¼ęį▒ŻūCļŖÖCĄ─┐žųŲŠ½Č╚ĪŻį┌Į╗┴„╦┼Ę■“īäėŽĄĮyųąŻ¼▓╔ė├ķ]Łh┐žųŲŻ¼┐╔ų▒Įė▓╔╝»ļŖÖCŠÄ┤aŲ„Ą─Ę┤üą┼╠¢Ż¼▓óį┌ā╚▓┐ą╬│╔╬╗ų├Łh║═╦┘Č╚ŁhŻ¼ę╗░Ń▓╗Ģ■│÷¼F▓Į▀MļŖÖCüG▓Į╗“▀^ø_¼FŽ¾Ż¼┐žųŲąį─▄Ė³┐╔┐┐ĪŻ
6Īó▓╗═¼Ą─╦┘Č╚Ēææ¬ąį─▄
▓Į▀M±R▀_ė╔ņoų╣╝ė╦┘ĄĮ╣żū„╦┘Č╚(═©│Ż╩Ū├┐ĘųńŖÄū░┘▐D)ąĶę¬200~400║┴├ļĪŻęį╦╔Ž┬ MSMA 400 WĮ╗┴„╦┼Ę■ļŖÖC×ķ└²Ż¼Į╗┴„╦┼Ę■ŽĄĮyÅ─ņoų╣╝ė╦┘ĄĮ3000 RPMĄ─Ņ~Č©▐D╦┘ų╗ąĶÄū║┴├ļŻ¼┐╔ė├ė┌ę¬Ū¾┐ņ╦┘åó═ŻĄ─┐žųŲł÷║ŽĪŻ
7Īó▓╗═¼▀\äė┐žųŲĘĮ╩Į
▓Į▀MļŖäėÖC┼c╦┼Ę■ļŖäėÖC▓╗═¼Ą─▀\äė┐žųŲĘĮ╩Į
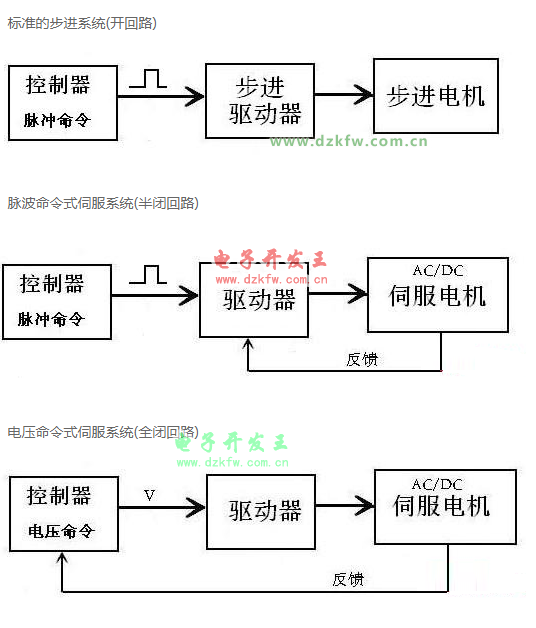
Įø▀^ī”╔Ž╩÷7³cĄ─įö╝ÜĘų╬÷Ż¼╬ęéā░l¼FĮ╗┴„╦┼Ę■ŽĄĮyį┌║▄ČÓĘĮ├µČ╝ā×ė┌▓Į▀MļŖÖCĪŻĄ½╩Ūį┌ę╗ą®ę¬Ū¾▓╗Ė▀Ą─ł÷║Žųąę▓│Ż▓╔ė├▓Į▀MļŖÖCū„×ķł╠ąąļŖÖCĪŻę“┤╦Ż¼į┌įOėŗ╣żśI┐žųŲŽĄĮyĢrŻ¼æ¬ŠC║Ž┐╝æ]┐žųŲę¬Ū¾Īó│╔▒ŠĄ╚ę“╦žŻ¼▀xō±║Ž▀mĄ─╦┼Ę■┐žųŲŽĄĮyĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū