
ā╔ĘN▓Į▀MļŖÖC┐žųŲŽĄĮyįŁ└Ē
ę╗Īó▓Į▀MļŖÖC┐žųŲįŁ└ĒŻ©ķ_Łh┐žųŲŻ®
PLC╗“╔Ž╬╗ÖC░l╦═├}ø_Ņl┬╩Īó├}ø_öĄ┴┐ĪóļŖäėÖC▀\ąąĘĮŽ“ą┼╠¢ĮoĄĮ▓Į▀M“īäėŲ„Ż¼▓Į▀M“īäėŲ„“īäė▓Į▀MļŖäėÖC▀\▐DŻ¼▓Į▀MļŖäėÖCĦäėÖCąĄ▓┐Ęų▀\äėĪŻ▓Į▀MļŖäėÖCø]ėąĘ┤ü╬╗ų├ą┼╠¢Įo▓Į▀M“īäėŲ„ĪŻ
ā׳cŻ║▓Į▀M“īäėŲ„“īäėĄ─▓Į▀MļŖäėÖCĄ─▀xą═ĘČć·ÅVŻ¼įOų├║åå╬Ż¼ęūš{╣ØŻ¼▌^▒Ńę╦ĪŻ
╚▒³cŻ║üG▓ĮŻ¼Č©╬╗▓╗£╩ĪŻ
 ╣▓Ļ¢śOĮėĘ©║═╣▓ĻÄśOĮėĘ©Ą─▓Į▀MļŖÖCĮėŠĆłD
╣▓Ļ¢śOĮėĘ©║═╣▓ĻÄśOĮėĘ©Ą─▓Į▀MļŖÖCĮėŠĆłD
▓Į▀MļŖÖC“īäėŲ„Ą─ĮėŠĆłD╝░plcĮėŠĆĘĮĘ©
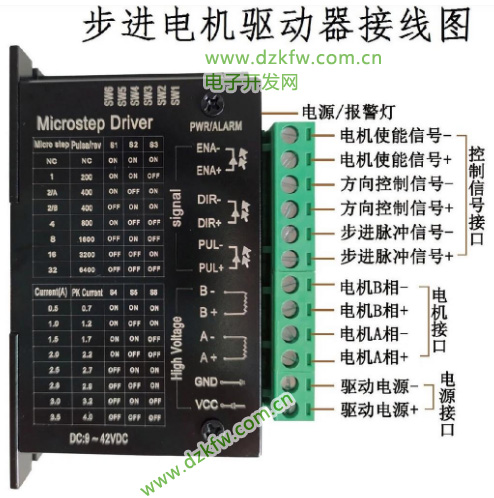
▓Į▀MļŖÖCĮėŠĆ
Ąõą═▓Į▀M“īäėŲ„ĮėŠĆłD
ĮėŠĆų„ę¬ėą3éĆĘĮ├µŻ║
1ĪóļŖį┤Ż¼░³└©“īäėŲ„ļŖį┤║═├}ø_ĘĮŽ“ą┼╠¢ļŖį┤Ż¼ąĪą═▓Į▀MėąĄ─╩Ū╩╣ė├═¼ę╗éĆ24ļŖį┤Ż¼ėąĄ─╩Ūå╬¬ÜĮo“īäė┼õę╗éĆļŖį┤Ż¼ę╗░Ń╩Ū36-90VĄ─ĪŻ
2ĪóļŖÖCĮėŠĆŻ║ļŖÖCę╗░Ń╩ŪABā╔éĆ└@ĮMĪŻī”ė┌▓Į▀MļŖÖCā╚▓┐ĮYśŗŻ¼╬ęĢ■å╬¬Ü│÷ę╗Ų¬╬─š┬üĒĮķĮBĄ─Ż¼ę“×ķ└’├µėąą®╔╠śI├ž├▄ŽÓĻPĄ─Ż¼▓╗║├š╣╩Š╠½ČÓĪŻ
3Īóą┼╠¢Ż║ų„ę¬░³└©├}ø_ĪóĘĮŽ“ĪŻ║▄ČÓł÷║Ž╬ęéā╩Ū▓╗Įė╩╣─▄Č╦Ż¼▀@éĆĄ├┐┤─ŃĄ─æ¬ė├ł÷Š░
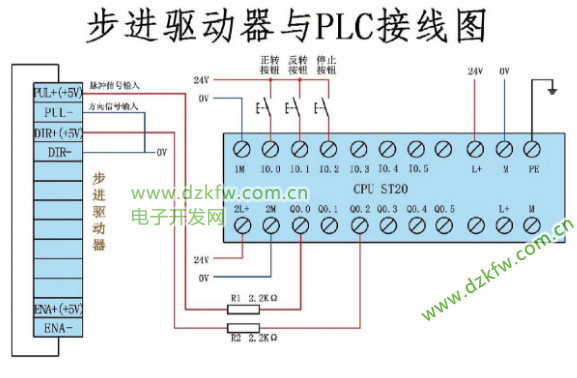
▓Į▀MļŖÖC“īäėŲ„ĮėŠĆūóęŌ╩┬ĒŚŻ║
1ĪóļŖį┤▓╗ę¬ĖŃÕeŻ¼ėąĄ─ą┼╠¢╩Ū24VŻ¼ėąĄ─╩Ū5VĪŻ▀@╩Ū║▄ČÓ╚╦▓╗ūóęŌĄ─ĄžĘĮĪŻ╚ń╣¹╩Ū5vĄ─Ż¼Š═ąĶę¬┤«ĮėļŖūĶüĒĮĄē║Ž▐┴„ĪŻ
2Īó╝ÜĘųę¬įOų├║├Ż¼▒╚╚ńįOų├1000éĆ├}ø_▐Dę╗╚”Ż¼Č°äé║├▐Dę╗╚”Ą─╬╗ęŲ╩Ū5mm,─Ū├┤─Ńį┌PLC░lę╗éĆ├}ø_ęŲäėĄ─ŠÓļxŠ═╩Ū0.005mm.
3ĪóļŖÖCĘĮŽ“Ż¼╚ń╣¹▓╗ŽļĖ─PLC│╠ą“Ż¼─ŪŠ══©▀^░čA╗“B└@ĮMĄ─ļSęŌā╔Ė∙ŠĆš{ōQę╗Ž┬ĪŻ
Č■Īó▓Į▀MļŖÖC┐žųŲįŁ└ĒŻ©ķ]Łh┐žųŲŻ®
ļSų°╝╝ągĄ─░lš╣Ż¼▓Į▀MļŖäėÖCę▓ėą░▓čbŠÄ┤aŲ„Ą─Ż¼Ę┤ü╬╗ų├ą┼╠¢ĄĮ▓Į▀M“īäėŲ„Ż¼ĮM│╔ķ]Łh┐žųŲŽĄĮyŻ¼ę▓ėąĄ─┘Y┴ŽĮąū÷▓Į▀M╦┼Ę■┐žųŲŽĄĮyĪŻ═¼śėPLC╗“╔Ž╬╗ÖC░l╦═├}ø_Ņl┬╩Īó├}ø_öĄ┴┐ĪóļŖäėÖC▀\ąąĘĮŽ“ą┼╠¢ĮoĄĮ▓Į▀M“īäėŲ„Ż¼▓Į▀M“īäėŲ„“īäė▓Į▀MļŖäėÖC▀\▐DŻ¼▓Į▀MļŖäėÖCĦäėÖCąĄ▓┐Ęų▀\äėĪŻ
▓Į▀M╦┼Ę■┐žųŲŽĄĮyĮŌøQ┴╦▓Į▀MļŖÖCķ_Łh┐žųŲĢrĄ─üG▓Įå¢Ņ}Ż¼╠ßĖ▀┴╦Č©╬╗┐žųŲĄ─Š½Č╚Ż©ė╔ŠÄ┤aŲ„Ęų▒µ┬╩øQČ©Ż¼▓╗Ģ■▒╚╦┼Ę■ļŖÖCĄ─Š½Č╚Ė▀Ż®ĪŻ
![86ķ]ŁhļŖÖC║═“īäėŲ„](/jichu/UploadFiles_6678/202306/2023061814283767.jpg)
▓Į▀MļŖäėÖCĄ─ĘNŅÉ
ę╗ĪóĘ┤æ¬╩Į▓Į▀MļŖäėÖC
ĮYśŗ║åå╬Īó▓ĮŠÓĮŪąĪŻ¼▐Dūėķ_ėąč└▓█Ż¼┼cČ©ūė╔ŽĄ─č└▓█ī”æ¬ĪŻ
Č■Īóė└┤┼╩Į▓Į▀MļŖäėÖC
▐DŠž┤¾Ż¼▓ĮŠÓĮŪę▓┤¾Ż¼▌^╣Ø─▄ĪŻ
╚²Īó╗ņ║Ž╩Į▓Į▀MļŖäėÖC
ŠC║Ž╔Ž├µā╔ĘN▓Į▀MļŖäėÖCĄ─ā׳cŻ¼▌ö│÷▐DŠž┤¾Ż¼▓ĮŠÓĮŪąĪŻ¼─▄║─ąĪŻ¼▀\ąąŅl┬╩Ė▀Ż¼╩Ū¼Fį┌╩ął÷╔ŽĄ─ų„┴„▓Į▀MļŖäėÖCĪŻ
▐Dūė▌SŽ“ūŅ└’īė╩ŪŽĪ═┴▓─┴ŽųŲ│╔Ą─ė└┤┼¾wŻ¼Ųõ═Ō├µ░³ć·ę╗╚”┐╔┤┼╗»Ą─╣ĶõōŲ¼Ż¼╣ĶõōŲ¼═ŌłAķ_ėąč└▓█Ż¼▐Dūė▌SŽ“ā╔Č╦Ęųäe×ķSśO║═NśOŻ¼SśOč└▓█┼cNśOč└▓█Õeķ_╬╗ų├Ż¼ī”Č©ūė«a╔·═Ų┴”║═└Ł┴”ĪŻČ©ūė╔Žę▓ķ_ėąč└▓█┼c▐Dūėč└▓█ī”æ¬ĪŻ
▓ĮŠÓĮŪ=180/Ż©Č©ūė└@ĮMŽÓöĄ*▐Dūė²XöĄŻ®

▓Į▀M“īäėŲ„Ą─ļŖ┬ĘĘNŅÉ
▓Į▀M“īäėŲ„╩Ū×ķ▓Į▀MļŖäėÖCĘ■䚥─Ż¼ū„ė├╩Ū╩╣▓Į▀MļŖäėÖC«a╔·ą²▐D┤┼ł÷Ż¼Ęų×ķā╔ĘNļŖ┬ĘŻ║
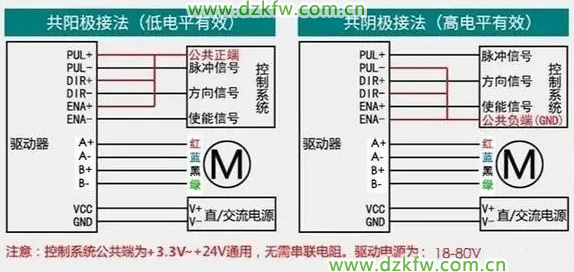
ę╗Īóå╬śO“īäėŲ„ļŖ┬Ę
▓Į▀M“īäėŲ„╦∙ė├Ą─ļŖį┤×ķų▒┴„ļŖį┤Ż¼▓Į▀M“īäėŲ„▌ö│÷Įo▓Į▀MļŖäėÖCŠĆ╚”Ą─ų▒┴„ļŖ┴„×ķå╬ĘĮŽ“Ż║╚ńA \B\C\DĪŻ

▓Į▀MļŖÖCČ©ūė
Č■ĪóļpśO“īäėŲ„ļŖ┬Ę
▓Į▀M“īäėŲ„╦∙ė├Ą─ļŖį┤×ķų▒┴„ļŖį┤Ż¼▓Į▀M“īäėŲ„▌ö│÷Įo▓Į▀MļŖäėÖCŠĆ╚”Ą─ų▒┴„ļŖ┴„×ķš²Ę┤ĘĮŽ“Į╗╠µŻ║╚ńA \B\-A\-BĪŻ
ĖąųxķåūxųĖš²Ż¼ĻPūó┴╦ĮŌĖ³ČÓŻĪ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū