
╬„ķTūė╣½╦Š×ķ▀mæ¬ąĪą═▀\äė┐žųŲąĶŪ¾Ż¼═Ų│÷┴╦ę╗┐ŅąĪą═Ė▀ąį─▄╦┼Ę■SINAMICS V90ĪŻSINAMICS V90 ╦┼Ę■“īäė║═ SIMOTICS S-1FL6 ╦┼Ę■ļŖÖCĮM│╔┴╦ąį─▄ā×╗»Ż¼ęūė┌╩╣ė├Ą─╦┼Ę■“īäėŽĄĮyŻ¼░╦ĘN“īäėŅÉą═Ż¼Ų▀ĘN▓╗═¼Ą─ļŖÖC▌SĖ▀ęÄĖ±Ż¼╣”┬╩ĘČć·Å─0.05kWĄĮ7.0kWęį╝░å╬ŽÓ║═╚²ŽÓĄ─╣®ļŖŽĄĮy╩╣Ųõ┐╔ęįÅVĘ║ė├ė┌Ė„ąąĖ„śIĪŻ▒╚╚ńŻ║Č©╬╗Ż¼é„╦═Ż¼╩šŠĒĄ╚įOéõųąŻ¼═¼Ģrįō╦┼Ę■ŽĄĮy┐╔ęį┼cS7-1500T/S7-1500/S7-1200 ▀Mąą═Ļ├└┼õ║ŽīŹ¼FžSĖ╗Ą─▀\äė┐žųŲ╣”─▄ĪŻ─Ū├┤Ż¼Į±╠ņąĪŠÄ═¼┤¾╔±ę╗ŲŻ¼Ä¦─Ń═µ▐D╬„ķTūėV90╦┼Ę■“īäėŲ„ĪŻ

Ęų×ķ├}ø_ą“┴ą░µ▒ŠŻ©PTIŻ®║═PROFINET░µ▒ŠŻ©PNŻ®ā╔ĘNŻ¼╚ńŽ┬łD╦∙╩ŠŻ║

ų¦│ųęįŽ┬ÄūĘN▀\äė─Ż╩ĮŻ║
1Ż® ═Ō▓┐├}ø_╬╗ų├┐žųŲ─Ż╩ĮŻ©PTIŻ®
2Ż® ā╚▓┐įOČ©ųĄ╬╗ų├┐žųŲ─Ż╩ĮŻ©IPOSŻ®
3Ż® ╦┘Č╚─Ż╩ĮŻ©SŻ®
4Ż® ▐DŠž─Ż╩ĮŻ©TŻ®
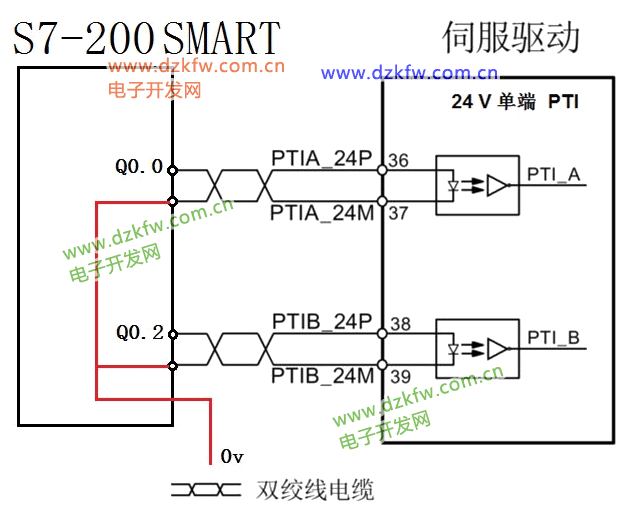
PTI╩Ū╦┼Ę■æ¬ė├ųąūŅ╗∙▒Š╩╣ė├ę▓╩ŪūŅŅlĘ▒Ą──Ż╩ĮŻ¼Į±╠ņ╬ęéāę╗ŲüĒīW┴Ģ╚ń║╬╩╣ė├įō─Ż╩ĮĪŻ═©▀^PLC░l╦═Ė▀╦┘├}ø_üĒ“īäė╦┼Ę■▀MąąČ©╬╗Ż¼ī”ė┌╦┼Ę■Ą─š{įć▌^×ķ║åå╬Ż¼Ę▒¼ŹĄ─╩Ūį┌PLCųąŠÄīæĖ▀╦┘├}ø_▌ö│÷│╠ą“ĪŻ
╩ūŽ╚Ż¼æ¬įōī”═Ō▓┐ė▓╝■▀BĮėŻ¼╚ńŽ┬łD╦∙╩ŠĪŻ
╬„ķTūėplc║═╦┼Ę■“īäėŲ„Ą─ĮėŠĆ╩ŠęŌłD
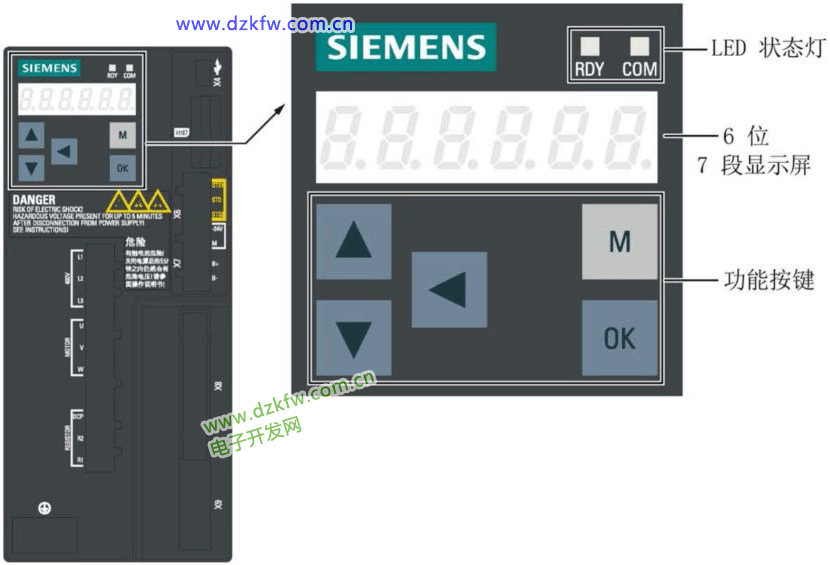
ĮėŽ┬üĒķ_╩╝ī”ģóöĄ▀Mąąš{įćŻ¼┐╔ęį═©▀^“īäėŲ„├µ░Õ║═V-ASSISTANT▄ø╝■ā╔ĘNĘĮ╩Įš{įćģóöĄŻ¼Ą½▄ø╝■┼c“īäėŲ„▀BĮė║¾├µ░Õät¤oĘ©╩╣ė├ĪŻ┤╦╠Ä║åå╬ĮķĮB├µ░ÕįOų├ģóöĄĄ─ĘĮĘ©Ż¼├µ░Õ╚ńŽ┬łD╦∙╩ŠĪŻ
į┌įOų├ģóöĄŪ░ūŅ║├Ž╚▀Mąą╗ųÅ═│÷ÅSįOų├Ż¼╗ųÅ══Ļ│╔║¾öÓļŖųžåóŻ¼ĘĮĘ©╚ńŽ┬łD╦∙╩ŠĪŻ

╦∙ėąģóöĄš{įć═Ļ│╔║¾Č╝ąĶę¬▀MąąöÓļŖ▒Ż│ųįOų├Ż¼īóą▐Ė─Ą─ģóöĄ┤µā”ĄĮROM▒Ż│ųģ^Ż¼Ę±ätöÓļŖ║¾╗ųÅ═╚▒╩ĪųĄŻ¼ĘĮĘ©╚ńŽ┬łD╦∙╩ŠĪŻ
įOų├ģóöĄ▓Į¾E╚ńŽ┬łD╦∙╩ŠŻ║
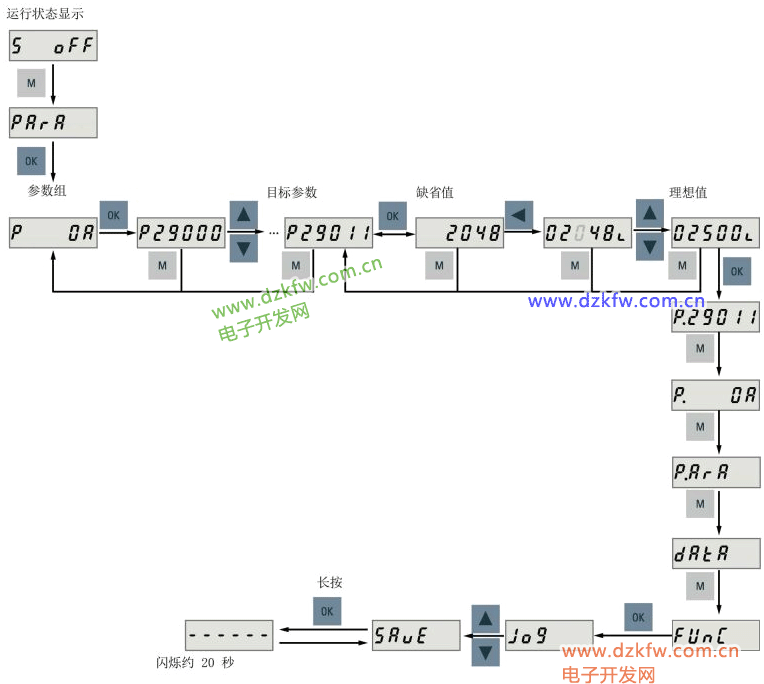
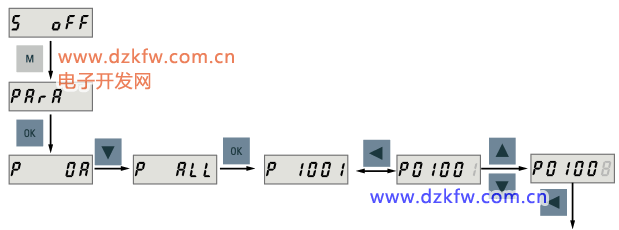
į┌▀M╚ļģóöĄįOų├Ū░ąĶę¬▀xō±š²┤_Ą─ģóöĄĮM╠¢╚ńP0AŻ¼0BŻ¼0CŻ¼0DĄ╚Ż¼ę▓┐╔▀xō±P ALLĮMŻ¼▀M╚ļ║¾═©▀^<ęŲ╬╗µIüĒą▐Ė─ģóöĄŠÄ╠¢Ż¼╚ńŽ┬łD╦∙╩ŠĪŻ
ūóęŌŻ║│§┤╬╔ŽļŖ“īäėŲ„╬┤┼cPLCŽÓ▀BĢrŻ¼│Ż│÷¼FF7491 ĪóF7492║═A52902╠¢Õeš`ĪŻįŁę“×ķ ĒśĢrßśąą│╠Ž▐ųŲą┼╠¢(CWL)║═─µĢrßśąą│╠Ž▐ųŲą┼╠¢(CCWL)ęį╝░╝▒═ŻŻ©EMGSŻ® ▀@╚²éĆą┼╠¢×ķOFFĪŻ─¼šJ▒žĒÜ×ķON▓┼┐╔▀\ąąŻ¼╚ń╣¹īŹļH╩╣ė├Ģr¤oąĶė├ĄĮ▀@╚²éĆ╣”─▄Ż¼┐╔═©▀^░čP29300Ą─Ą┌1Īó2Īó6╬╗įO×ķ1üĒÅŖųŲ×ķONŻ¼╚ńŽ┬łD╦∙╩ŠĪŻ
ūóęŌŻ║═©▀^├µ░ÕįOų├Ģrę¬▐DōQ│╔╩«┴∙▀MųŲöĄŻ¼═©▀^▄ø╝■įOų├ät▐DōQ│╔╩«▀MųŲĪŻ

╚ń╬┤ūRäeĄĮ╦┼Ę■ļŖÖCŻ¼ätĢ■░l╔·╣╩šŽ F52984ĪŻšł╩ųäė▌ö╚ļļŖÖCIDŻ©p29000Ż®▀MąąąŻ£╩Ż¼ļŖÖC ID ┐╔ģóęŖļŖÖCŃæ┼ŲĪŻ
─¼šJ▀\ąąĘĮŽ“×ķ CWŻ©ĒśĢrßśŻ®ĪŻ╚ńėą▒žę¬Ż¼┐╔═©▀^įOų├ģóöĄ p29001 Ė³Ė─▀\ąąĘĮŽ“ĪŻp29001=0Ż║CWŻ¼p29001=1Ż║CCW
Ž┬├µ╬ęéāüĒ┐┤ę╗Ž┬═Ō▓┐├}ø_╬╗ų├─Ż╩ĮĄ─š{įć▓Į¾EŻ║
1ĪóöÓķ_ų„ļŖį┤Ż╗
2Īóīó╦┼Ę■“īäėöÓļŖŻ¼▓ó╩╣ė├ą┼╠¢ļŖ└|īóŲõ▀BĮėų┴┐žųŲŲ„Ż©└²╚ńŻ¼SIMATIC S7-200 SMARTŻ®ĪŻ×ķ┤_▒Żš²│Ż▀\ąąŻ¼öĄūų┴┐ą┼╠¢ CWLĪóCCWL ║═EMGS ▒žĒÜ▒Ż│ųį┌Ė▀ļŖŲĮŻ©1Ż®Ż╗
3Īó┤“ķ_ DC 24 V ļŖį┤Ż╗
4ĪóÖz▓ķ╦┼Ę■ļŖÖCŅÉą═Ż╗
Īż ╚ń╣¹╦┼Ę■ļŖÖCĦėąį÷┴┐ŠÄ┤aŲ„Ż¼šł▌ö╚ļļŖÖCIDŻ©p29000Ż®-46
Īż ╚ń╣¹╦┼Ę■ļŖÖCĦėąĮ^ī”ŠÄ┤aŲ„Ż¼╦┼Ę■“īäė┐╔ęįūįäėūRäe╦┼Ę■ļŖÖCĪŻ
5ĪóįOų├P29003=0├}ø_╬╗ų├┐žųŲ─Ż╩ĮŻ©▒žĒÜį┌╩╣─▄ĻPķ]ĀŅæBą▐Ė─Ż¼─¼šJp29003=0Ż®Ż╗
6Īó▒Ż┤µģóöĄ▓óųžåó╦┼Ę■“īäėęįæ¬ė├═Ō▓┐├}ø_╬╗ų├┐žųŲ─Ż╩ĮĄ─įOČ©Ż╗
7ĪóįOų├ģóöĄ p29010 ▀xō±įOČ©ųĄ├}ø_ą┼╠¢ą╬╩ĮĪŻ Īż p29010=0Ż║├}ø_+ĘĮŽ“Ż¼š²▀ē▌ŗŻ╗
8ĪóįOų├ģóöĄ p29014 ▀xō±├}ø_▌ö╚ļ═©Ą└ĪŻp29014=1Ż║24 V å╬Č╦├}ø_▌ö╚ļŻ╗
24 V å╬Č╦├}ø_▌ö╚ļ×ķ│÷ÅSįOų├ĪŻ
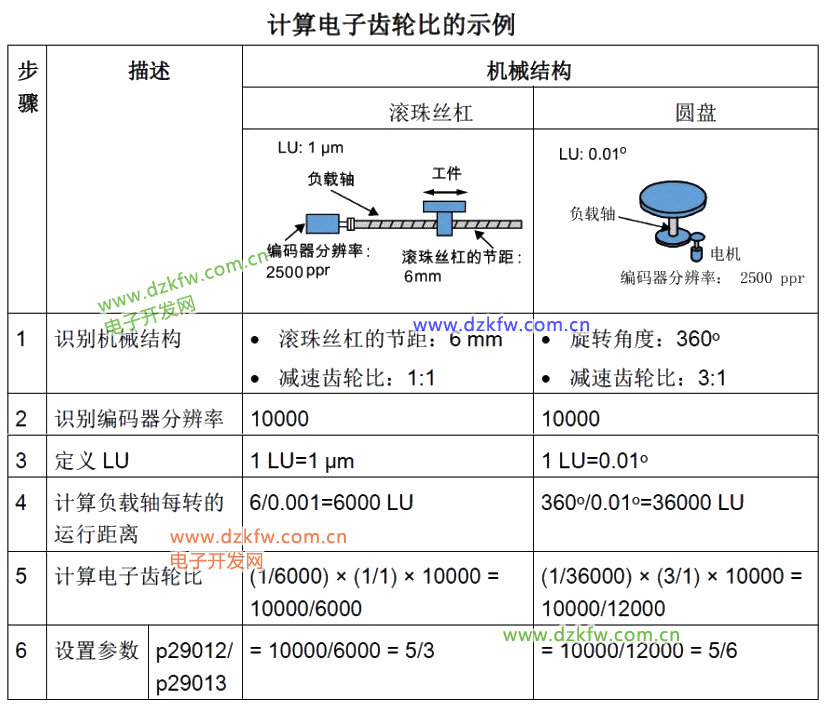
9ĪóįOų├ļŖūė²X▌å▒╚ĪŻ═©▀^ģóöĄ p29012 ║═ p29013 üĒįOų├ļŖūė²X▌å▒╚ĪŻ
p29012Ż║ļŖūė²X▌å▒╚ĘųūėĪŻ╣▓ėą╦─éĆĘųūėŻ©p29012[0] ų┴p29012[3]Ż®ĪŻ
p29013Ż║ļŖūė²X▌å▒╚Ęų─ĖĪŻ ę▓┐╔═©▀^p29011Ż║ ├┐▐DįOČ©ųĄ├}ø_öĄĪŻ
10ĪóįOų├┼żŠžŽ▐ųĄ║═▐D╦┘Ž▐ųĄĪŻā╚▓┐įOČ©ųĄŻ║ p29043Ż╗
11Īó═©▀^įOų├Ž┬┴ąģóöĄüĒ┼õų├▒žę¬Ą─öĄūų┴┐▌ö╚ļDIą┼╠¢Ż║
│÷ÅSįOų├╚ńŽ┬Ż║Ż©═Ō▓┐├}ø_╬╗ų├─Ż╩ĮDIą┼╠¢╩╣ė├▌^╔┘Ż®
Īż p29301[0]: 1 (SON) Īż p29302[0]: 2 (RESET)
Īż p29303[0]: 3 (CWL) Īż p29304[0]: 4 (CCWL)
Īż p29305[0]: 5 (G-CHANGE) Īż p29306[0]: 6 (P-TRG)
Īż p29307[0]: 7 (CLR) Īż p99308[0]: 10 (TLIM1)
12Īó Öz▓ķŠÄ┤aŲ„ŅÉą═ĪŻ╚ń╩╣ė├Į^ī”ŠÄ┤aŲ„Ż¼▒žĒÜ═©▀^ BOP ▓╦å╬╣”─▄Ī░ABSĪ▒š{š¹Į^ī”ŠÄ┤aŲ„Ż╗
13ĪóįOų├ŠÄ┤aŲ„├}ø_▌ö│÷Ż╗
14Īó═©▀^ BOP ▒Ż┤µģóöĄŻ╗
15Īó┤“ķ_ų„ļŖį┤Ż╗
16ĪóŪÕ│²╣╩šŽ║═ł¾Š»Ż╗
17Īóīóą┼╠¢ SON ų├×ķĖ▀ļŖŲĮŻ¼═©▀^ųĖ┴ŅįOéõ▌ö╚ļ═Ō▓┐├}ø_Ż¼╦┼Ę■ļŖÖCķ_╩╝▀\ąąĪŻ╚ń╣¹▓╗╩╣ė├═Ō▓┐╩╣─▄Ż¼┐╔īóP29300Ą─Ą┌0╬╗įOų├×ķ1╩╣─▄ÅŖųŲ×ķONĪŻ
į┌╔Ž╩÷▓Į¾EųąŻ¼įOų├ļŖūė²X▌å▒╚▌^×ķĘ▒¼ŹŻ¼Ž┬├µĮķĮBę╗Ž┬ļŖūė²X▌å▒╚Ą─įOų├ĘĮĘ©ĪŻ
ļŖūė²X▌å▒╚=Ę┤ü╗žüĒĄ─├}ø_öĄ/░l╦═▀^╚źĄ─├}ø_öĄ
×ķ╩▓├┤ę¬įOų├ļŖūė²X▌å▒╚Ż¼įOų├┴╦²X▌å▒╚ėą╩▓├┤ū„ė├Ż┐
ę╗Īó╩Ūš{š¹ļŖÖCą²▐D1╚”╦∙ąĶꬥ─ųĖ┴Ņ├}ø_öĄŻ¼ęį▒ŻūCļŖÖC▐D╦┘─▄ē“▀_ĄĮąĶŪ¾▐D╦┘ĪŻ
└²╚ń╔Ž╬╗ÖCPLCūŅ┤¾░l╦═├}ø_Ņl┬╩×ķ100KHzŻ¼╚¶▓╗ą▐Ė─ļŖūė²X▌å▒╚Ż¼ ätļŖÖCą²▐D1╚”ąĶę¬10000éĆ├}ø_Ż¼─Ū├┤ļŖÖCūŅĖ▀▐D╦┘×ķ600rpmŻ¼╚¶īóļŖūė²X▌å▒╚įO×ķ2:1Ż¼╗“š▀īó├┐▐D├}ø_öĄįOČ©×ķ5000Ż¼ät┤╦ĢrļŖÖC┐╔ęį▀_ĄĮ1200rpm▐D╦┘ĪŻ
Č■Īó ▒▄├Ō├}ø_öĄ«a╔·ąĪöĄŻ¼╚Īš¹║¾ė░ĒæČ©╬╗Š½Č╚
Ė∙ō■Ą┌ę╗ĘNĘĮĘ©╦Ń│÷ļŖūė²X▌å▒╚Ż¼ļm╚╗╦┘Č╚ØMūŃ┴╦Ż¼▀Ćæ¬┐╝æ]├}ø_«ö┴┐╩Ūʱ─▄ØMūŃŠ½Č╚ę¬Ū¾Ż¼▀Ćę¬Ė∙ō■ÖCąĄé„äė▒╚£y╦Ńę╗Ž┬├}ø_«ö┴┐Ż¼╚¶¤oĘ©ØMūŃ┐╔▀m«ö£pąĪ▐D╦┘ęį▀_ĄĮŠ½Č╚ę¬Ū¾ĪŻ╚ń╣¹ŽĄĮyī”Š½Č╚ę¬Ū¾║▄Ė▀ąĶę¬▌^ąĪĄ─├}ø_«ö┴┐Ż¼ätæ¬Ė∙ō■├}ø_«ö┴┐▀\╦ŃŻ¼▀\╦ŃĘĮĘ©╚ńŽ┬łD╦∙╩ŠĪŻ
┐éĮYŻ║įOČ©ļŖūė²X▌å▒╚┐ŽČ©Ģ■ĮĄĄ═╦┼Ę■Ą─Ęų▒µ┬╩ė░Ē抽Č╚Ż¼Ą½║Ž└ĒĄ─įOų├▒▄├Ō├}ø_«a╔·ąĪöĄģs─▄╠ßĖ▀Š½Č╚ĪŻŪęį┌š`▓Ņį╩įSĘČć·ā╚▀m«öš{š¹ļŖūė²X▌å▒╚┐╔ęį╠ßĖ▀ļŖÖC▐D╦┘Ż¼╦∙ęįį┌įOČ©ļŖūė²X▌å▒╚▓ó▓╗─▄ę╗╬ČĄ─░┤šš╣½╩Į═Ų╦ŃŻ¼æ¬«öÖÓ║ŌŠ½Č╚║═╦┘Č╚Ą─ę¬Ū¾Ż¼╩╣ŽĄĮyąį─▄░lō]ĄĮūŅ╝čĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū