
ę╗ĪóŪ░čį
į┌╔Žę╗Ų¬ųąįö╝ÜųvĄĮ┴╦╚²┴ŌPLCĄ─╔ŽÖC┴„│╠Ż¼▒ŠŲ¬▀M╚ļš²Ņ}Ż¼ųvĮŌ╚ń║╬╩╣ė├╚²┴ŌPLC▀Mąą▓Į▀MļŖÖCĄ─┐žųŲŻ¼ų„ę¬Ęų×ķ▓Į▀MļŖÖC╗∙ĄAų¬ūRĪó╚²┴ŌPLC▓Į▀MļŖÖC┐žųŲ╗∙ĄAĪóĒŚ─┐īŹæ╚²▓┐ĘųĪŻ
Č■Īó▓Į▀MļŖÖC╗∙ĄAų¬ūR

-
╗∙▒ŠČ©┴x ▓Į▀MļŖÖC╩Ūę╗ĘNīóļŖ├}ø_ą┼╠¢▐DōQ×ķŠ½┤_ĮŪ╬╗ęŲ╗“ŠĆ╬╗ęŲĄ─ķ_Łh┐žųŲļŖÖCĪŻ├┐▌ö╚ļę╗éĆ├}ø_Ż¼ļŖÖC░┤╣╠Č©▓ĮŠÓĮŪ▐DäėŻ¼Ųõ▐D╦┘║══Żų╣╬╗ų├āHė╔├}ø_Ņl┬╩║═öĄ┴┐øQČ©Ż¼┼cžō▌d¤oĻPĪŻ
-
╣żū„įŁ└Ē
- ļŖ┤┼“īäėŻ║Č©ūė└@ĮM═©ļŖ║¾«a╔·┤┼ł÷Ż¼╬³ę²╗“┼┼│Ō▐DūėŻ©ė└┤┼¾w╗“ī¦┤┼▓─┴ŽŻ®ą²▐D╠žČ©ĮŪČ╚ĪŻ└²╚ńŻ¼ā╔ŽÓ╗ņ║Ž╩ĮļŖÖC═©▀^Į╗╠µĖ─ūāČ©ūėŠĆ╚”ļŖ┴„ĘĮŽ“īŹ¼F▓Į▀MĪŻ
- ╬ó▓Į“īäėŻ║═©▀^š²Žę▓©ļŖ┴„┐žųŲŻ¼īóå╬ę╗▓ĮŠÓ╝ÜĘų×ķĖ³ąĪĮŪČ╚Ż©╚ń1/32▓ĮŻ®Ż¼╠ß╔²Š½Č╚▓ó£p╔┘š±äėĪŻ
- Š═─┐Ū░Ą─╩╣ė├ł÷Š░üĒ┐┤╬ęéāį┌ę╗░Ń╣ż│╠ųą╩╣ė├Ą─Č╝╩Ū╬ó▓Į“īäėĄ─▓Į▀MļŖÖCŻ¼ų┴ė┌ļŖ┤┼“īäėĄ─▓Į▀MļŖÖCė├į┌▒╚▌^┤¾ą═Ą─ł÷Š░└²╚ń┤┼æęĖĪĪŻ
-
▓Į▀MļŖÖC▀\äėįŁ└Ē
▓Į▀MļŖÖCĄ─┐žųŲŠ½Č╚ę└┘ćė┌└@ĮMļŖ┴„Ą─ŽÓ╬╗┼cĘ∙ųĄŠ½┤_š{ųŲĪŻ▒M╣▄╬ó▓Į“īäėŻ©MicrosteppingŻ®└Ēšō╔ŽąĶę¬ā╔ŽÓš²Žę▓©ļŖ┴„Ą─╩Ė┴┐║Ž│╔Ż¼Ą½ų„┴„┐žųŲŲ„Ż©╚ńPLCĪóMCUĪóFPGAŻ®Ą─═©ė├I/OČ╦┐┌āHų¦│ųPWMĘĮ▓©ą┼╠¢▌ö│÷Ż©╣╠Č©š╝┐š▒╚╗“Ņl┬╩┐╔š{Ż®ĪŻę“┤╦Ż¼ąĶ═©▀^▓Į▀MļŖÖC“īäėŲ„īŹ¼FęįŽ┬ĻPµIą┼╠¢▐DōQ┼cį÷ÅŖ╣”─▄Ż║
-
ĘĮ▓©-š²Žę▓©š{ųŲ╝╝ąg
“īäėŲ„ā╚ų├╝ÜĘų┐žųŲ─ŻēKŻ¼īóPLC▌ö│÷Ą─ĘĮ▓©├}ø_ą“┴ą▐D╗»×ķš²Žę/ėÓŽęŽÓ╬╗▓ŅļŖ┴„ĪŻ└²╚ńŻ¼16╝ÜĘų─Ż╩ĮŽ┬Ż¼“īäėŲ„═©▀^▓ķ▒ĒĘ©╔·│╔ā╔ŽÓļA╠▌ĀŅš²Žę▓©ļŖ┴„Ż¼īŹ¼F▓ĮŠÓĮŪÅ─1.8ĪŃĮĄų┴0.1125ĪŃĄ─ŲĮ╗¼▀\äėĪŻ -
ļŖ┴„╩Ė┴┐║Ž│╔┼c╣”┬╩Ę┼┤¾
“īäėŲ„▓╔ė├Hś“ļŖ┬Ęī”┐žųŲą┼╠¢▀Mąą╣”┬╩Ę┼┤¾Ż¼▓ó═©▀^ļŖ┴„ķ]ŁhĘ┤üŻ©╚ńöž▓©Ž▐┴„╝╝ągŻ®┤_▒Ż└@ĮMļŖ┴„┼c─┐ś╦▓©ą╬ę╗ų┬ĪŻ┤╦▀^│╠┐╔ęųųŲę“ļŖÖCĘ┤ļŖäėä▌ę²ŲĄ─┴”Šž▓©äėĪŻ -
├}ø_-ŽÓ╬╗═¼▓ĮÖCųŲ
PLC▌ö│÷Ą─├}ø_Ņl┬╩Ż©PPSŻ®┼cĘĮŽ“ą┼╠¢Ż©DIRŻ®═©▀^“īäėŲ„▐DōQ×ķŽÓ╬╗ŪąōQĢrą“ĪŻ└²╚ńŻ¼į┌ļpśO╦─ŠĆųŲļŖÖCųąŻ¼“īäėŲ„Ė∙ō■DIRą┼╠¢š{š¹A+/A-┼cB+/B-└@ĮMĄ─═©ļŖĒśą“Ż¼īŹ¼Fš²Ę┤▐D┐žųŲĪŻ -
╝ÜĘų“īäėĄ─ė▓╝■īŹ¼F
Ė▀Č╦“īäėŲ„╝»│╔öĄūųą┼╠¢╠Ä└ĒŲ„Ż©DSPŻ®Ż¼═©▀^ŅAįO╝ÜĘųģóöĄŻ©╚ń1/32▓ĮŻ®ī”▌ö╚ļĘĮ▓©▀Mąą▓ÕųĄ▀\╦ŃŻ¼╔·│╔Ė▀Ęų▒µ┬╩ŽÓ╬╗ļŖ┴„ĪŻ┤╦╝╝ąg┐╔Ž¹│²é„Įy╚½▓Į/░ļ▓Į“īäėĄ─╣▓š±å¢Ņ}Ż¼ĮĄĄ═▀\äėįļ┬ĢĪŻ
šf╚╦įÆŠ═╩ŪŻ║▓Į▀MļŖÖCĄ─┐žųŲąĶ꬚²Žę▓©Ą½╩Ūę╗░ŃüĒšf¤ošōPLC▀Ć╩ŪMCUęÓ╗“╩ŪFPGAĄ╚Ų„╝■Ż¼▓╗ū÷╠ž╩Ō╠Ä└ĒÅ─IO┐┌▌ö│÷Ą─Č╝╩ŪĘĮ▓©Ż¼«ö╚╗▀@└’ų„ę¬ėæšōPLCŻ¼PLCų╗─▄▌ö│÷▓╗═¼Ņl┬╩▓╗═¼š╝┐š▒╚Ą─ĘĮ▓©Ż¼ę“┤╦ąĶę¬ī”æ¬Ą─▓Į▀MļŖÖC“īäė░ÕīóPLC▌ö│÷Ą─ĢrńŖą┼╠¢Ż©┐žųŲą┼╠¢Ż®║═ĘĮŽ“ą┼╠¢▐D╗»×ķ╣®▓Į▀MļŖÖC╣żū„Ą─ļŖ┴„ą┼╠¢ĪŻ
╚²Īó╚²┴ŌPLC▓Į▀MļŖÖC┐žųŲ╗∙ĄA
Ė∙ō■Ū░╬─╦∙šfŻ¼╬ęéāų¬Ą└▌ö╚ļĄĮļŖÖCĄ─ą┼╠¢▓╗╩Ūų▒ĮėÅ─PLC▌ö│÷Ą─ą┼╠¢ę¬Įø▀^▓Į▀MļŖÖC“īäė░Õ▐D╗»Ż¼─Ū├┤╬ęéāį§├┤śė┐žųŲļŖÖC▐D╦┘─žŻ┐
╩ūŽ╚┤_Č©ļŖÖCĄ─▓Į▀MĮŪŻ©ė╔ļŖÖCøQČ©Ż®
į┘┤_Č©ļŖÖC“īäė░ÕĄ─╝ÜĘųöĄŻ©ė╔ļŖÖC“īäė░Õ┐©øQČ©Ż®
▓Į▀MļŖÖC▐Dę╗╚”ąĶꬥ─├}ø_öĄ
▓Į▀MļŖÖC├┐▐Dę╗╚”╦∙ąĶĄ─├}ø_öĄ╚ĪøQė┌ļŖÖCĄ─╗∙▒Š▓ĮŠÓĮŪ║═╝ÜĘųöĄĪŻŠ▀¾wüĒšfŻ¼╚ń╣¹ų¬Ą└▓Į▀MļŖÖCĄ─ę╗éĆ╗∙▒Š▓ĮŠÓĮŪŻ©╝┤ļŖÖCĮė╩šę╗éĆ├}ø_╦∙▐DäėĄ─ĮŪČ╚Ż®Ż¼▓óŪęų¬Ą└“īäėŲ„įOų├Ą─╝ÜĘų│╠Č╚Ż¼─Ū├┤Š═┐╔ęįėŗ╦Ń│÷ļŖÖC▐Dę╗╚”ąĶę¬ČÓ╔┘éĆ├}ø_ĪŻ
Č╚┴┐å╬╬╗Ż¼ę▓Š═╩Ū╚ń║╬║Ō┴┐▓Į▀M±R▀_ąąū▀Ą─ŠÓļx---▓Į▀MĮŪŻ¼Š═╩Ūę╗éĆ├}ø_±R▀_▐DäėĄ─ĮŪČ╚ĪŻ▓Į▀M±R▀_Ą─▓Į▀MĮŪę╗░Ń×ķ1.8ĪŃĪŻ0.9ĪŃŻ¼0.72ĪŃŻ¼0.36ĪŃŻ¼0.0288ĪŃŻ¼Ą╚Ą╚ĪŻ▓Į▀MĮŪįĮąĪŻ¼ät▓Į▀M±R▀_Ą─┐žųŲŠ½Č╚įĮĖ▀ĪŻ╬ęéāĖ∙ō■▓Į▀MĮŪ┐╔ęį┐žųŲ±R▀_ąąū▀Ą─Š½┤_ŠÓļxĪŻ▒╚╚ńšfŻ¼▓Į▀MĮŪ0.72ĪŃŻ¼±R▀_ą²▐Dę╗ų▄ąĶꬥ─├}ø_öĄ×ķ360/0.72=500├}ø_Ż¼ę▓Š═╩Ūī”▓Į▀M±R▀_“īäėŲ„░l│÷500éĆ├}ø_ą┼╠¢Ż¼±R▀_▓┼ą²▐Dę╗ų▄ĪŻ
- ╩ūŽ╚Ż¼┤_Č©▓Į▀MļŖÖCĄ─╗∙▒Š▓ĮŠÓĮŪŻ¼▒╚╚ń1.8Č╚ĪŻ
- ╚╗║¾Ż¼Ė∙ō■“īäėŲ„╔ŽĄ─╝ÜĘųįOų├Ż¼└²╚ń32╝ÜĘųŻ¼▀@ęŌ╬Čų°├┐éĆ╗∙▒Š▓ĮŠÓĮŪ▒╗Ęų│╔┴╦32Ę▌Ż¼├┐ę╗├}ø_Ģ■ūīļŖÖC▐DäėĖ³ąĪĄ─ĮŪČ╚ĪŻ
- ėŗ╦Ńę╗╚”Ż©360Č╚Ż®ąĶꬥ─├}ø_öĄŻ¼Š═╩Ūė├360Č╚│²ęįĮø▀^╝ÜĘų║¾Ą─├┐▓ĮĮŪČ╚ĪŻį┌▀@éĆ└²ūėųąŻ¼ę╗╚”ąĶꬥ─├}ø_öĄĄ╚ė┌360Č╚│²ęį╝ÜĘų║¾Ą─├┐▓ĮĮŪČ╚Ż©1.8Č╚│²ęį╝ÜĘųŽĄöĄŻ®ĪŻ
├┐├ļńŖ«a╔·Ą─├}ø_öĄŻ©PPSŻ®
├┐├ļńŖ─▄«a╔·Ą─├}ø_öĄ╚ĪøQė┌ŽĄĮyĄ─ĢrńŖŅl┬╩ęį╝░╔·│╔├┐éĆPWM├}ø_╦∙ąĶĄ─ĢrķgŻ©╗“š▀šf╩ŪŽĄĮyĢrńŖų▄Ų┌öĄŻ®ĪŻ▀@éĆųĄĘ┤ė│┴╦┐žųŲŲ„─▄ē“Ž“▓Į▀MļŖÖC░l╦═├}ø_Ą─╦┘Č╚ĪŻ
- ╚ń╣¹ų¬Ą└ŽĄĮyĄ─ĢrńŖŅl┬╩Ż¼▓óŪęų¬Ą└×ķ┴╦«a╔·ę╗éĆPWM├}ø_ąĶę¬ČÓ╔┘éĆŽĄĮyĢrńŖų▄Ų┌Ż¼Š═┐╔ęįėŗ╦Ń│÷├┐├ļńŖ┐╔ęį«a╔·Ą─├}ø_öĄ┴┐ĪŻ
- └²╚ńŻ¼╚ń╣¹ŽĄĮyĢrńŖŅl┬╩║▄Ė▀Ż¼▓óŪęįOČ©├┐éĆPWM├}ø_ė╔ę╗Č©öĄ┴┐Ą─ŽĄĮyĢrńŖų▄Ų┌ĮM│╔Ż¼─Ū├┤┐╔ęį═©▀^ŽĄĮyĢrńŖŅl┬╩│²ęį├┐éĆPWM├}ø_╦∙ąĶĄ─ŽĄĮyĢrńŖų▄Ų┌öĄüĒĄ├ĄĮ├┐├ļ─▄«a╔·Ą─├}ø_öĄĪŻ
▓Į▀MļŖÖCĄ─▐D╦┘Ż©RPMŻ®
▓Į▀MļŖÖCĄ─▐D╦┘┐╔ęįė├├┐ĘųńŖ▐D▀^Ą─╚”öĄüĒ▒Ē╩ŠĪŻ▀@╚ĪøQė┌├┐├ļńŖ«a╔·Ą─├}ø_öĄ║═▐Dę╗╚”╦∙ąĶĄ─├}ø_öĄĪŻ
- ▐D╦┘ėŗ╦Ń╗∙ė┌├┐├ļńŖ«a╔·Ą─├}ø_öĄŻ©PPSŻ®│²ęį▐Dę╗╚”╦∙ąĶĄ─├}ø_öĄŻ¼╚╗║¾│╦ęį60▐DōQ│╔├┐ĘųńŖĄ─▐D╦┘ĪŻ
- ▀@ęŌ╬Čų°Ż¼═©▀^š{š¹╝ÜĘųįOų├╗“Ė─ūā├┐├ļńŖ░l╦═Ą─├}ø_Ņl┬╩Ż¼┐╔ęį┐žųŲ▓Į▀MļŖÖCĄ─▐D╦┘ĪŻį÷╝ė╝ÜĘų╝ēäeĢ■£p╔┘├┐┤╬├}ø_ūīļŖÖC▐DäėĄ─ĮŪČ╚Ż¼Č°į÷╝ė├}ø_Ņl┬╩ätĢ■╝ė┐ņļŖÖCĄ─▐D╦┘ĪŻ
ŠC╔Ž╦∙╩÷Ż¼▓Į▀MļŖÖC▐DäėĄ─╚”öĄų▒Įė┼cĮė╩šĄĮĄ─PWM├}ø_öĄ┴┐ŽÓĻPŻ¼Č°PWM├}ø_Ą─öĄ┴┐ėų╩▄ĄĮŽĄĮyĢrńŖŅl┬╩Īó╝ÜĘųįOų├ęį╝░├┐éĆPWM├}ø_│ų└mĢrķgĄ─ė░ĒæĪŻ═©▀^š{╣Ø▀@ą®ģóöĄŻ¼┐╔ęįŠ½┤_Ąž┐žųŲ▓Į▀MļŖÖCĄ─╬╗ų├║═╦┘Č╚ĪŻ
╔Ž├µ┐╔─▄ėą³cÅ═ļsŻ¼║åå╬³cüĒšfŠ═╩Ūų¬Ą└ļŖÖCĄ─▓Į▀MĮŪŻ¼╚╗║¾ų¬Ą└ļŖÖC“īäė░ÕĄ─╝ÜĘųöĄŻ¼ī”æ¬PLCüĒšfŻ¼PLCĄ─ę╗éĆ├}ø_Ż©50š╝┐š▒╚Ż®ļŖÖCŠ═ū▀▓Į▀MĮŪ/╝ÜĘųöĄ▀@├┤ČÓČ╚Ż¼ų¬Ą└▀@éĆ¼Fį┌─ŃŽļ╦Ń▐D╦┘╚”öĄąĶꬥ─PWMŅl┬╩║═ĢrķgŻ¼▓╗ė├╬ęČÓšf┴╦░╔ĪŻ
╦─ĪóĒŚ─┐īŹæ
─┐Ą─īŹ¼F▓Į▀MļŖÖCĄ─▀\äė▓ó┐žųŲŲõ░┤šš▓╗═¼Ą─Ņl┬╩▀Mąą▀\äėĪŻ╩ūŽ╚└¹ė├MOV├³┴Ņ×ķ▓╗═¼╝─┤µŲ„┤µ▓╗═¼Ą─Ņl┬╩Ż©Ė∙ō■ļŖÖCŅÉą═║═ļŖÖC“īäė░Õėŗ╦ŃŻ¼ėŗ╦ŃĘĮĘ©Ū░╬─ėąŻ®ĪŻ
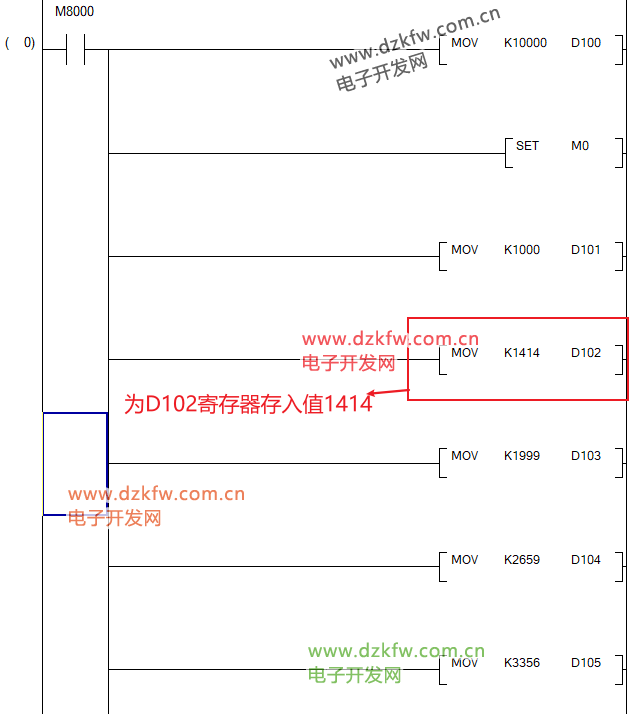

PLSY┐╔ęįūīPLCā╚▓┐Ą─▌ö│÷Ų„╝■į┌└^ļŖŲ„ėąą¦Ģrķgā╚▌ö│÷ŅAČ©öĄ┴┐éĆŅl┬╩Ą─PWM▓©ĪŻ
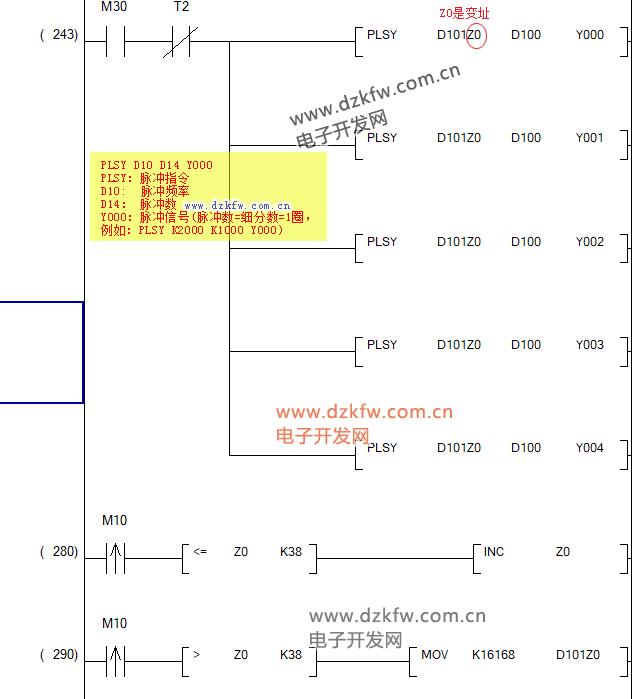
ļŖÖCŅl┬╩ūįäė╗»│╠ą“Ż¼├┐┼▄╣╠Č©öĄ┴┐Ą─├}ø_║¾ūįäėĖ³ą┬Ż©░┤Ū░├µ╝─┤µŲ„įOų├Ēśą“▀MąąĖ³ą┬Ż®,į┌Ė³ą┬ĄĮūŅ║¾ę╗éĆ╝─┤µŲ„ųĄęį║¾ęįįōŅl┬╩ę╗ų▒▀\ąąĪŻ
ūóŻ║Z0╩ŪūāųĘŻ¼×ķģ^ķgÅ═╬╗Ż¼▀\ąąįōųĖ┴Ņ║¾Ż¼T0-T196╦∙ėąĄ─Č©ĢrŲ„Ż¼╚½▓┐Å═╬╗ĪŻ
Z0=1Ż¼Y0Z0=Y1Ż¼┤╦ĢrY1³cĄ─äėĀŅæBę¬┐┤ėąø]ėą“īäėĪŻZ0×ķ╝─┤µŲ„Ż¼▓╗┤µį┌³c▓╗³c┴┴ĪŻ«ö▌ö╚ļMOV K1 Z0ĢrŻ¼╝┤┐╔ūīZ0Ą╚ė┌1Ż¼«öZ0=2ĢrŻ¼Y0Z0=Y2Ż¼│╠ą“×ķld m8000Īómov d0z0 d20v10ĪŻšf├„Ż║╚¶Z0=2Ż¼v10=5Ż¼▀\ąąųĖ┴Ņ║¾Ż¼╝┤īóD2ā╚├µĄ─öĄō■é„╦═ĄĮD30ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū