
Ū░čį
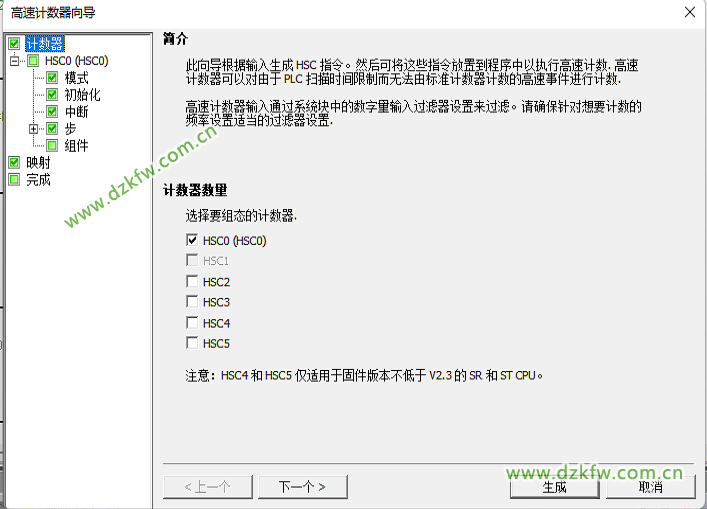
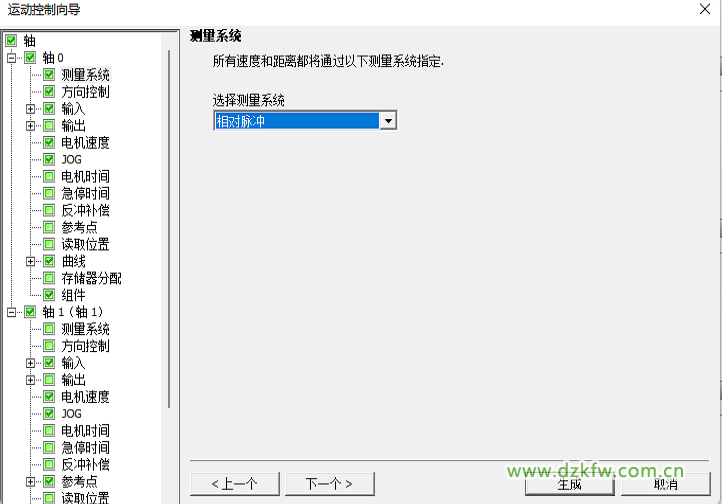
ūŅĮ³į┌īW(xu©”)┴Ģ(x©¬)╬„ķT(m©”n)ūėPLCĄ─Ė▀╦┘ėŗ(j©¼)öĄ(sh©┤)Ų„ųĖ┴Ņ║═▀\(y©┤n)äė(d©░ng)┐žųŲ▓┐ĘųŻ¼╩Ūė├▀\(y©┤n)äė(d©░ng)┐žųŲ▌S▌ö│÷ Ņl┬╩×ķ10kHzŻ¼ABŽÓš²Į╗ą┼╠¢(h©żo)Ą─ę╗╚f(w©żn)éĆ(g©©)├}ø_ą┼╠¢(h©żo) üĒ(l©ói)ūīĖ▀╦┘ėŗ(j©¼)öĄ(sh©┤)Ų„Įė╩šŻ¼Žļėøõøę╗Ž┬ūį╝║Ą─īW(xu©”)┴Ģ(x©¬)▀^(gu©░)│╠ĪŻę╗ĪóĖ▀╦┘ėŗ(j©¼)öĄ(sh©┤)Ų„
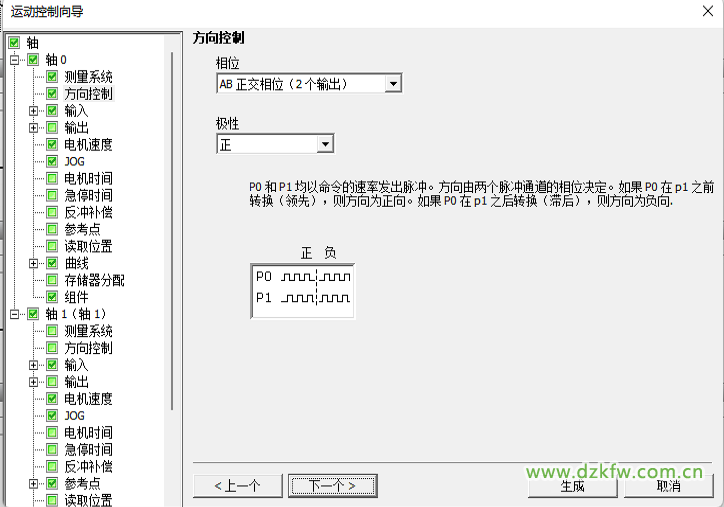
ĻP(gu©Īn)ė┌Ė▀╦┘ėŗ(j©¼)öĄ(sh©┤)Ų„Ą─ĮķĮB║═įŁ└Ē┐╔ęį╚ź┐┤╬„ķT(m©”n)ūėĄ─ķ_(k©Īi)░l(f©Ī)╩ųāį(c©©)║═╣┘ĘĮĮķĮBŻ¼▀@└’╠ß╣®µ£ĮėŻ║Ė▀╦┘ėŗ(j©¼)öĄ(sh©┤)Ų„
į┌╬„ķT(m©”n)ūėĄ─╔Ž╬╗ÖC(j©®)ųą┐╔ęįų▒Įė╩╣ė├Ė▀╦┘ėŗ(j©¼)öĄ(sh©┤)Ų„Ž“?q©▒)¦ü?l©ói)┼õų├│╠ą“ĪŻ
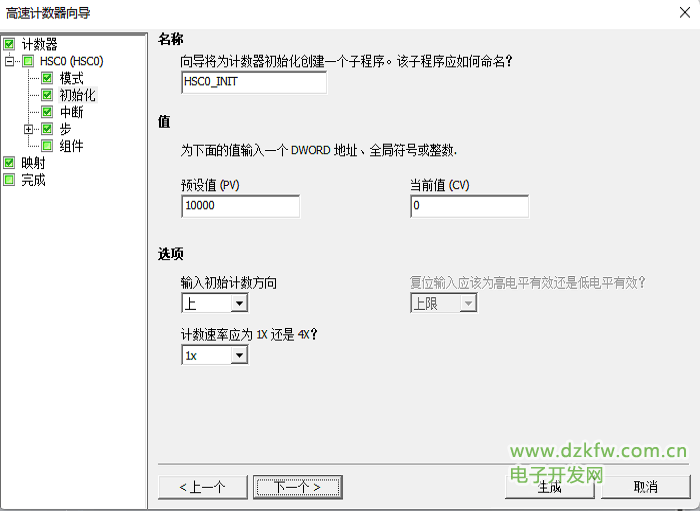

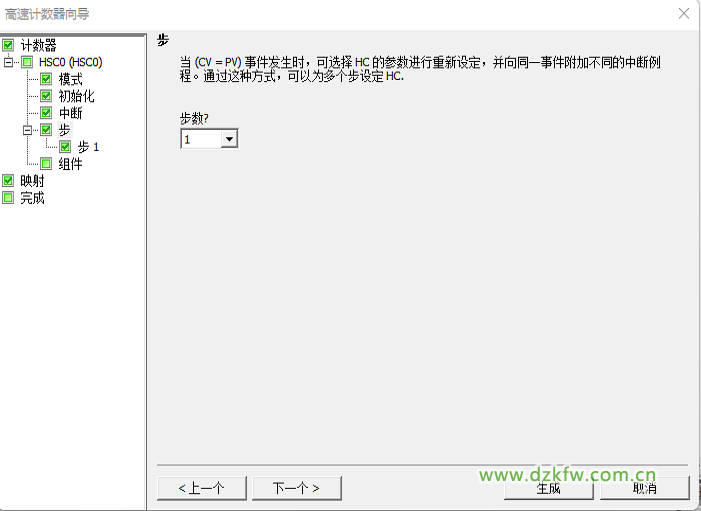
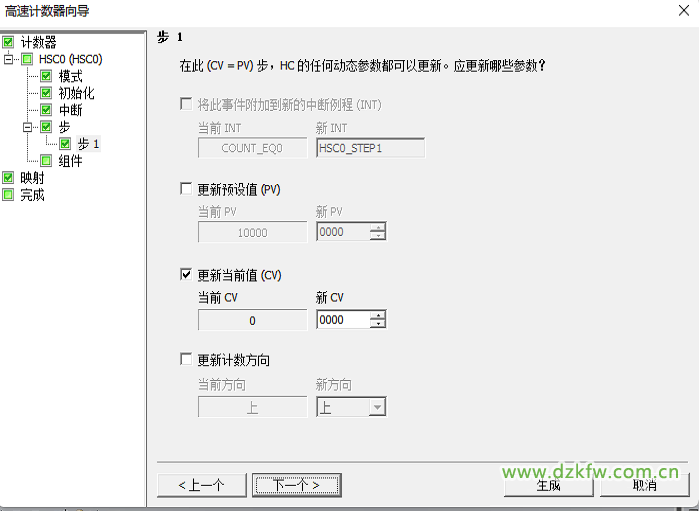
«ö(d©Īng)│╠ą“Č╝┼õų├═Ļ│╔║¾Ż¼į┌╬„ķT(m©”n)ūė╔Ž╬╗ÖC(j©®)└’Š═Ģ■(hu©¼)ūįäė(d©░ng)╔·│╔ŽÓæ¬(y©®ng)Ą─┤·┤aĪŻ
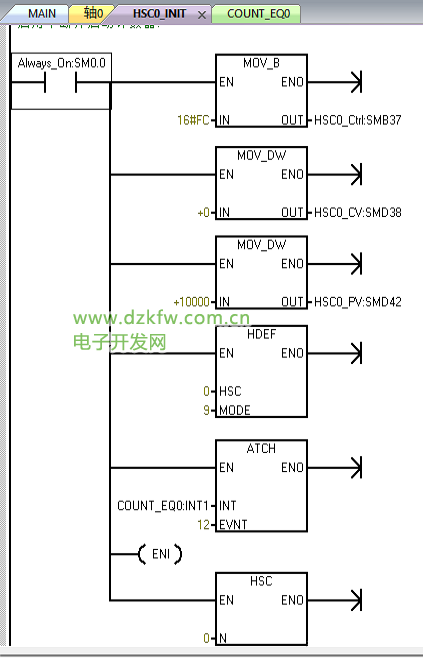
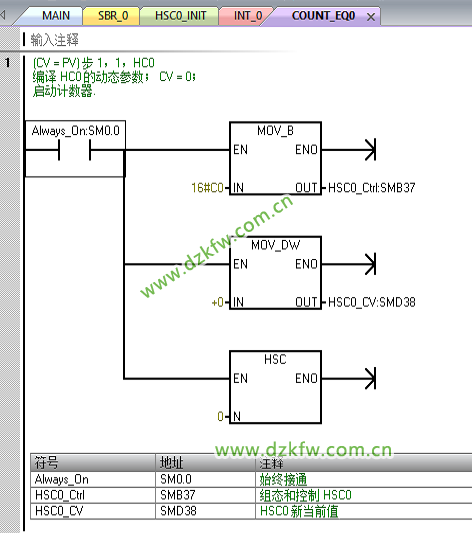
┐╔ęįį┌ųąöÓ│╠ą“Ż©Count_EQ0Ż®ųąīæ(xi©¦)ūį╝║Žļę¬╠Ē╝ėĄ─┐žųŲ│╠ą“ĪŻ
Č■Īó▀\(y©┤n)äė(d©░ng)┐žųŲ
ĻP(gu©Īn)ė┌▀\(y©┤n)äė(d©░ng)┐žųŲŻ¼╬„ķT(m©”n)ūėPLC╔Ž╬╗ÖC(j©®)ųąę▓ėą▀\(y©┤n)äė(d©░ng)┐žųŲŽ“?q©▒)¦Ż¼┐╔ęįų▒Įė╩Ūė├▀\(y©┤n)äė(d©░ng)┐žųŲŽ“?q©▒)¦ü?l©ói)╔·│╔┼õų├│╠ą“ĪŻ
╬„ķT(m©”n)ūė╣┘ĘĮ▀\(y©┤n)äė(d©░ng)┐žųŲ
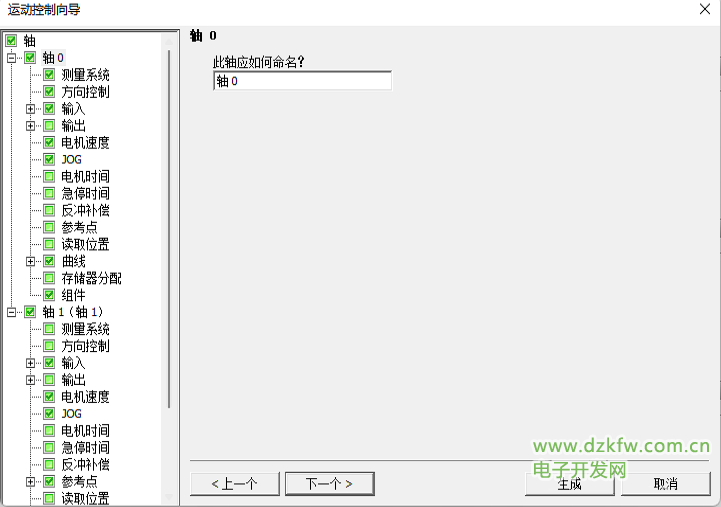
1.▀xō±ę¬╩╣ė├Ą─▌S
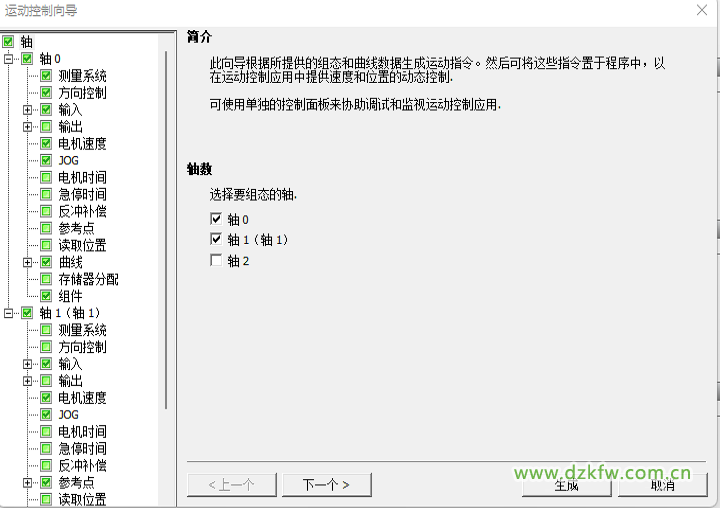
2.▀xō±£y(c©©)┴┐ŽĄĮy(t©»ng)Ż¼ėąŽÓī”(du©¼)├}ø_║═╣ż│╠å╬╬╗Ż©ė╔ė┌╬ęų╗ę¬░l(f©Ī)╦═ę╗╚f(w©żn)éĆ(g©©)├}ø_Ż¼╦∙ęį▀xō±ŽÓī”(du©¼)├}ø_Ż®
3. ┼õų├▌ö│÷├}ø_Ą─ą┼╠¢(h©żo)ŅÉą═║═śOąį
4.║¾├µĄ─┼õų├░┤ššūį╝║Ą─ąĶŪ¾╚ź▀xō±Ż¼╬ę▀@└’ų╗ąĶę¬░l(f©Ī)╦═├}ø_Ż¼╦∙ęįų▒Įė╠°ĄĮ▀\(y©┤n)äė(d©░ng)┐žųŲ╔·│╔Ą─ūė│╠ą“ĪŻ
╔·│╔Ą─┤·┤a╚ńŽ┬Ż║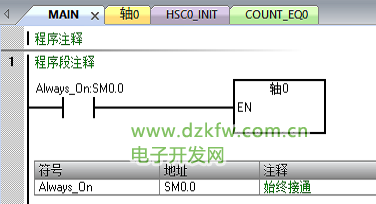

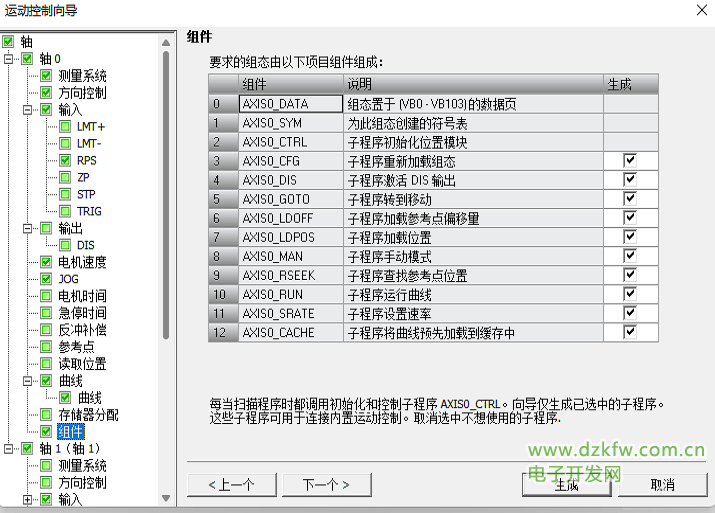
▀@└’ėą╔·│╔║▄ČÓūė│╠ą“Ż¼ų„ę¬ė├ĄĮĄ─ėąAXIS0_CTRL║═AXIS0_GOTO
▀@ą®ūė│╠ą“ųąCTRLę¬║═Ųõ╦¹ūė│╠ą“┤Ņ┼õŲüĒ(l©ói)ė├Ż¼CTRL▒žĒÜę¬╩╣ė├Ż¼ųž³c(di©Żn)üĒ(l©ói)ĮķĮBę╗Ž┬AXIS0_CTRL║═AXIS0_GOTOĪŻ
AXIS0_CTRL
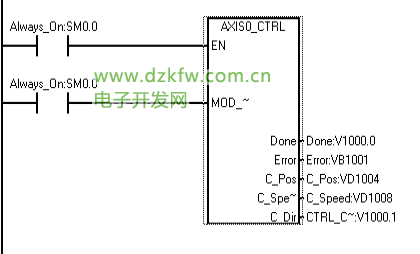
åóė├║═│§╩╝╗»▀\(y©┤n)äė(d©░ng)▌SŻ¼ĘĮĘ©╩Ūūįäė(d©░ng)├³┴Ņ▀\(y©┤n)äė(d©░ng)▌S├┐┤╬ CPU Ė³Ė─×ķ RUN ─Ż╩ĮĢr(sh©¬)╝ė▌dĮMæB(t©żi)/░³Įj(lu©░)▒ĒĪŻ
MOD_EN ģóöĄ(sh©┤)▒žĒÜķ_(k©Īi)åóŻ¼▓┼─▄åóė├Ųõ╦³▀\(y©┤n)äė(d©░ng)┐žųŲūė└²│╠Ž“▀\(y©┤n)äė(d©░ng)▌S░l(f©Ī)╦═├³┴ŅĪŻ ╚ń╣¹ MOD_EN ģóöĄ(sh©┤)ĻP(gu©Īn)ķ]Ż¼▀\(y©┤n)äė(d©░ng)▌SĢ■(hu©¼)ųąų╣╦∙ėąš²į┌▀M(j©¼n)ąąĄ─├³┴ŅŻ╗
Done ģóöĄ(sh©┤)Ģ■(hu©¼)į┌▀\(y©┤n)äė(d©░ng)▌S═Ļ│╔╚╬║╬ę╗éĆ(g©©)ūė└²│╠Ģr(sh©¬)ķ_(k©Īi)åóŻ╗
Error ģóöĄ(sh©┤)┤µā”(ch©│)įōūė│╠ą“▀\(y©┤n)ąąĢr(sh©¬)Ą─Õe(cu©░)š`┤·┤aŻ╗
C_Pos ģóöĄ(sh©┤)▒Ē╩Š▀\(y©┤n)äė(d©░ng)▌SĄ─«ö(d©Īng)Ū░╬╗ų├ĪŻ Ė∙ō■(j©┤)£y(c©©)┴┐å╬╬╗Ż¼įōųĄ╩Ū├}ø_öĄ(sh©┤) (DINT) ╗“╣ż│╠å╬╬╗öĄ(sh©┤) (REAL)Ż╗
C_Speed ģóöĄ(sh©┤)╠ß╣®▀\(y©┤n)äė(d©░ng)▌SĄ─«ö(d©Īng)Ū░╦┘Č╚ĪŻ ╚ń╣¹─·ßśī”(du©¼)├}ø_ĮMæB(t©żi)▀\(y©┤n)äė(d©░ng)▌SĄ─£y(c©©)┴┐ŽĄĮy(t©»ng)Ż¼C_Speed ╩Ūę╗éĆ(g©©) DINT öĄ(sh©┤)ųĄŻ¼Ųõųą░³║¼├}ø_öĄ(sh©┤)/├┐├ļĪŻ╚ń╣¹─·ßśī”(du©¼)╣ż│╠å╬╬╗ĮMæB(t©żi)£y(c©©)┴┐ŽĄĮy(t©»ng)Ż¼C_Speed ╩Ūę╗éĆ(g©©) REAL öĄ(sh©┤)ųĄŻ¼Ųõųą░³║¼▀xō±Ą─╣ż│╠å╬╬╗öĄ(sh©┤)/├┐├ļ (REAL)ĪŻ
C_Dir ģóöĄ(sh©┤)▒Ē╩ŠļŖÖC(j©®)Ą─«ö(d©Īng)Ū░ĘĮŽ“Ż║ą┼╠¢(h©żo)ĀŅæB(t©żi) 0 = š²Ž“Ż╗ą┼╠¢(h©żo)ĀŅæB(t©żi) 1 = Ę┤Ž“Ż╗
AXIS0_GOTO

├³┴Ņ▀\(y©┤n)äė(d©░ng)▌S▐D(zhu©Żn)ĄĮ╦∙ąĶ╬╗ų├
START ģóöĄ(sh©┤)ķ_(k©Īi)åóĢ■(hu©¼)Ž“▀\(y©┤n)äė(d©░ng)▌S░l(f©Ī)│÷ GOTO ├³┴ŅĪŻ ī”(du©¼)ė┌į┌ START ģóöĄ(sh©┤)ķ_(k©Īi)åóŪę▀\(y©┤n)äė(d©░ng)▌S«ö(d©Īng)Ū░▓╗Ę▒├”Ģr(sh©¬)ł╠(zh©¬)ąąĄ─├┐┤╬Æ▀├ĶŻ¼įōūė└²│╠Ž“▀\(y©┤n)äė(d©░ng)▌S░l(f©Ī)╦═ę╗éĆ(g©©) GOTO ├³┴ŅĪŻ×ķ┴╦┤_▒ŻāH░l(f©Ī)╦═┴╦ę╗éĆ(g©©) GOTO ├³┴ŅŻ¼šł(q©½ng)╩╣ė├▀ģčžÖz£y(c©©)į¬╦žė├├}ø_ĘĮ╩Įķ_(k©Īi)åó START ģóöĄ(sh©┤)Ż╗
Pos ģóöĄ(sh©┤)░³║¼ę╗éĆ(g©©)öĄ(sh©┤)ųĄŻ¼ųĖ╩Šę¬ęŲäė(d©░ng)Ą─╬╗ų├Ż©Į^ī”(du©¼)ęŲäė(d©░ng)Ż®╗“ę¬ęŲäė(d©░ng)Ą─ŠÓļxŻ©ŽÓī”(du©¼)ęŲäė(d©░ng)Ż®ĪŻ Ė∙ō■(j©┤)╦∙▀xĄ─£y(c©©)┴┐å╬╬╗Ż¼įōųĄ╩Ū├}ø_öĄ(sh©┤) (DINT) ╗“╣ż│╠å╬╬╗öĄ(sh©┤) (REAL)Ż╗
Speed ģóöĄ(sh©┤)┤_Č©įōęŲäė(d©░ng)Ą─ūŅĖ▀╦┘Č╚ĪŻ Ė∙ō■(j©┤)╦∙▀xĄ─£y(c©©)┴┐å╬╬╗Ż¼įōųĄ╩Ū├}ø_öĄ(sh©┤)/├┐├ļ (DINT) ╗“╣ż│╠å╬╬╗öĄ(sh©┤)/├┐├ļ (REAL)Ż╗
Mode ģóöĄ(sh©┤)▀xō±ęŲäė(d©░ng)Ą─ŅÉą═Ż║
0Ż║Į^ī”(du©¼)╬╗ų├
1Ż║ŽÓī”(du©¼)╬╗ų├
2Ż║?ji©Żn)╬╦┘▀B└m(x©┤)š²Ž“ą²▐D(zhu©Żn)
3Ż║?ji©Żn)╬╦┘▀B└m(x©┤)Ę┤Ž“ą²▐D(zhu©Żn)
Abort ģóöĄ(sh©┤)åóäė(d©░ng)Ģ■(hu©¼)├³┴Ņ▀\(y©┤n)äė(d©░ng)▌S═Żų╣«ö(d©Īng)Ū░░³Įj(lu©░)▓ó£p╦┘Ż¼ų▒ų┴ļŖÖC(j©®)═Żų╣ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō(y©©)├µ
╦óą┬Ēō(y©©)├µ Ž┬ĄĮĒō(y©©)Ąū
Ž┬ĄĮĒō(y©©)Ąū