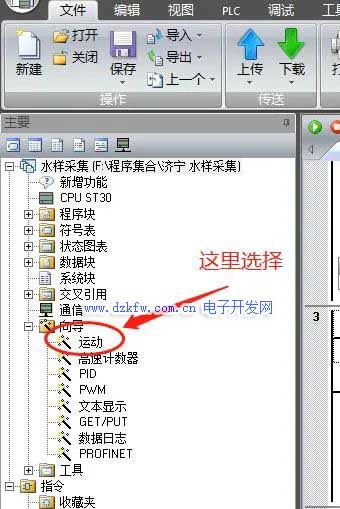
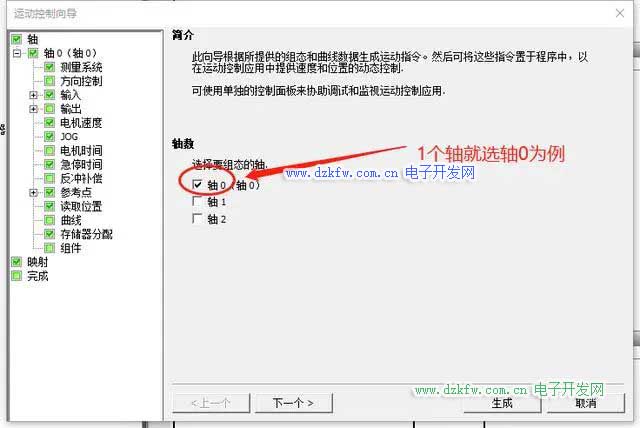
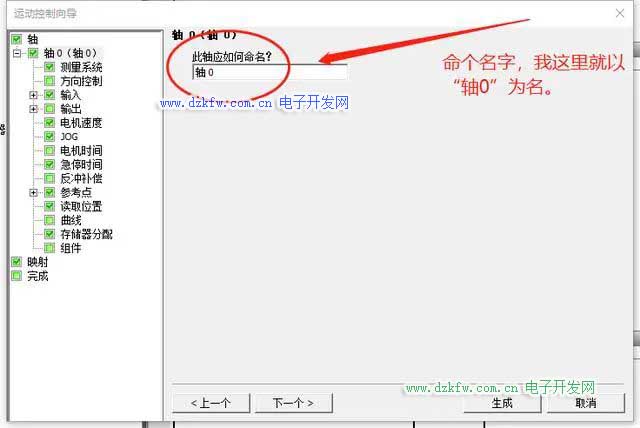
S7-200 smart ▀\(y©┤n)äė(d©░ng)┐žųŲųĖ┴Ņė╔ŠÄ│╠▄ø╝■Ž“?q©▒)¦╔·│╔Ż¼▀\(y©┤n)äė(d©░ng)┐žųŲųĖ┴Ņėą║▄ČÓŚlśŗ(g©░u)│╔Ż¼Ūę├┐ŚlųĖ┴ŅČ╝Ħėą║▄ČÓĮė┐┌ģóöĄ(sh©┤)Ż¼Žļę¬╩╣ė├▀@ą®ųĖ┴ŅŻ¼ę¬Ž╚ų¬Ą└Įė┐┌╩Ū╩▓├┤ęŌ╦╝Ż¼ļm╚╗Ä═ų·╬─š┬Č╝ėąĮŌßīŻ¼Ą½ūxČ«Ä═ų·╬─╝■ę▓║▄┘M(f©©i)ä┼Ż¼Į±╠ņŠ═įö╝Ü(x©¼)Įo┤¾╝ęĮķĮB▀\(y©┤n)äė(d©░ng)ųĖ┴ŅĄ─╩╣ė├ĪŻS7-200 SMRAT ▀\(y©┤n)äė(d©░ng)┐žųŲųĖ┴Ņ╚ńŽ┬łD╔·│╔Ż║1Īó▀xō±"▀\(y©┤n)äė(d©░ng)"ėęµI┤“ķ_ĪŻ
2Īó▒Š┤╬Š═ęį"▌S0"×ķ└²ĪŻ
3Īó├³éĆ(g©©)├¹ūųĪŻ
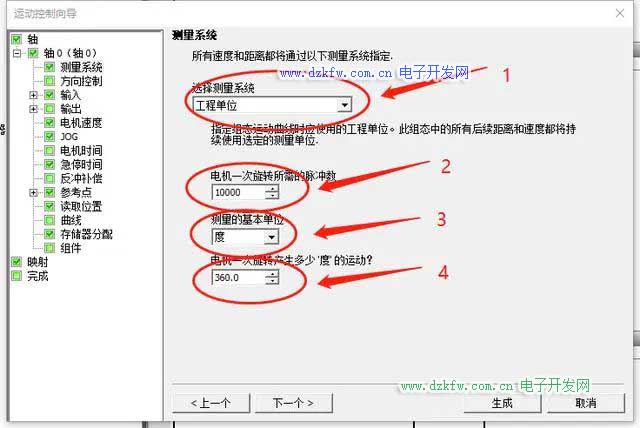
4ĪóöĄ(sh©┤)ūų1╬╗▀xō±╣ż│╠å╬╬╗Ż¼┐╔ęį╩╣╣ż│╠å╬╬╗Ż¼ę▓┐╔ęį╩╣ė├├}ø_ĪŻöĄ(sh©┤)ūų2╩ŪļŖÖC(j©®)ą²▐D(zhu©Żn)ę╗╚”Ą─├}ø_┴┐Ż¼╬ę─┐Ū░▓Į▀M(j©¼n)ō▄┤aįO(sh©©)Č©╩Ū10000éĆ(g©©)├}ø_ą²▐D(zhu©Żn)ę╗ų▄öĄ(sh©┤)ūų3╩Ūå╬╬╗Ż¼Ė∙ō■(j©┤)ūį╝║ąĶę¬įO(sh©©)Č©öĄ(sh©┤)ūų4╩ŪļŖÖC(j©®)ą²▐D(zhu©Żn)ę╗╚”Ą─╣ż│╠┴┐Ż¼╬ęįO(sh©©)Č©Ą─╩Ū360Č╚Ż¼ę▓Š═╩Ūšf10000éĆ(g©©)├}ø_ī”(du©¼)æ¬(y©®ng)360Č╚ĪŻ
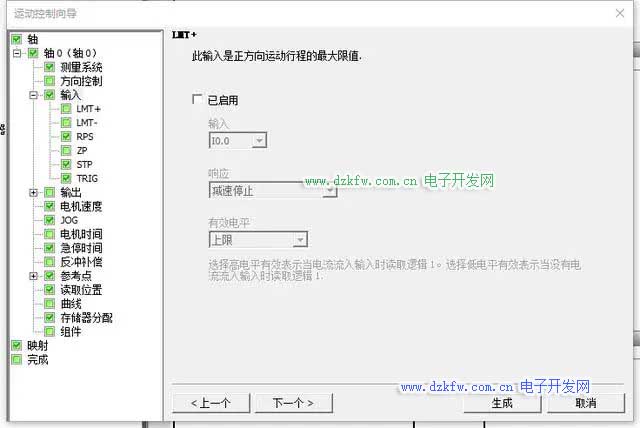
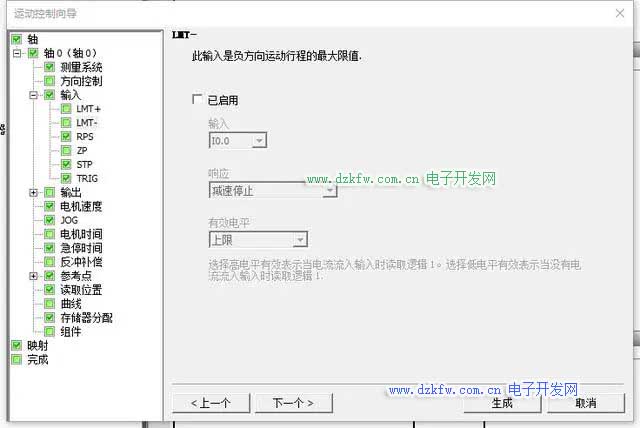
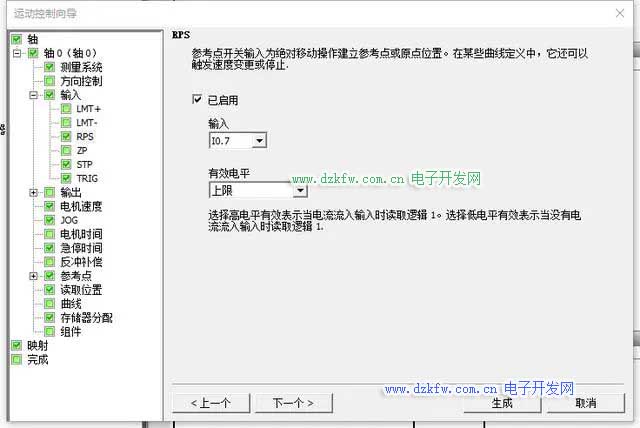
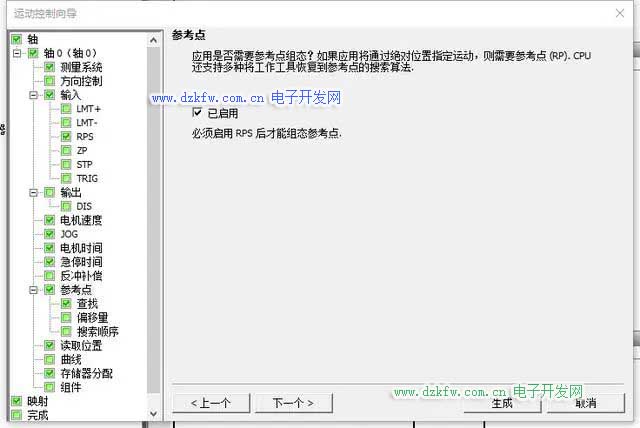
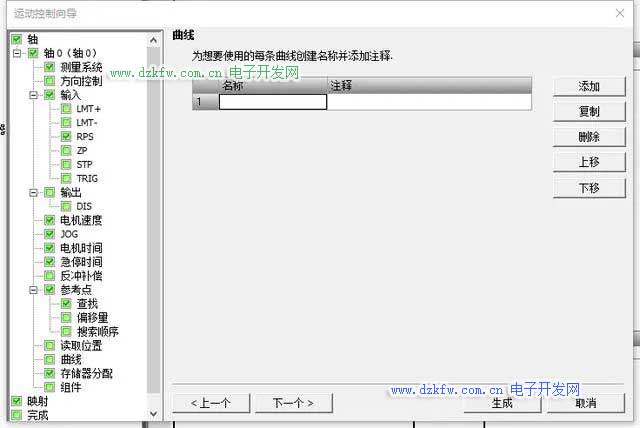
5ĪóĘĮŽ“┐žųŲŻ¼╬ę╩Ūė├Ą─├}ø_╝ėĘĮŽ“Ż¼╦∙ęį▀xō±å╬ĒŚ(xi©żng)2▌SĪŻ

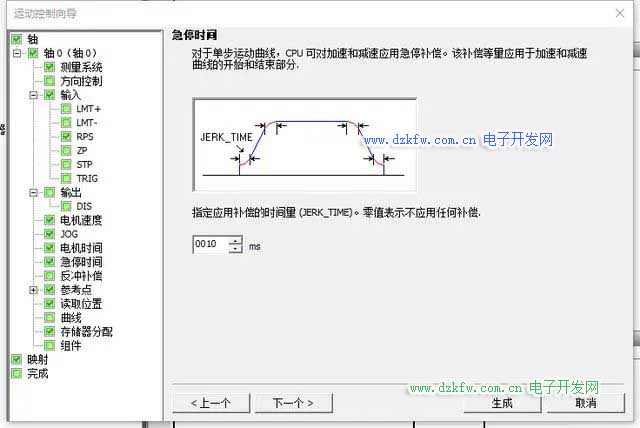
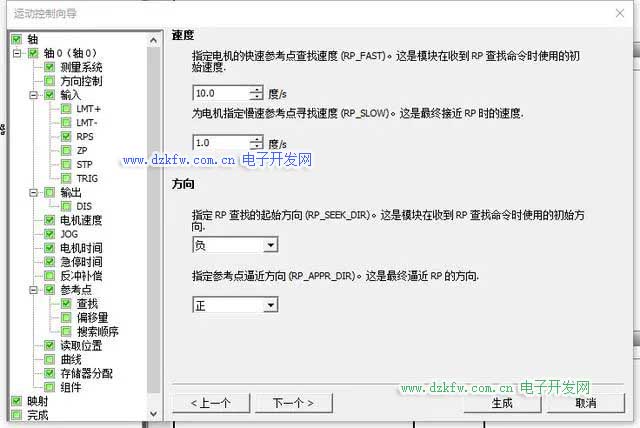
6Ī󚲞ō(f©┤)śOŽ▐Ė∙ō■(j©┤)ąĶę¬įO(sh©©)Č©Ż¼╬ę▀@éĆ(g©©)ø]ėąš²žō(f©┤)śOŽ▐Š═ø]ėą▀xō±ĪŻ
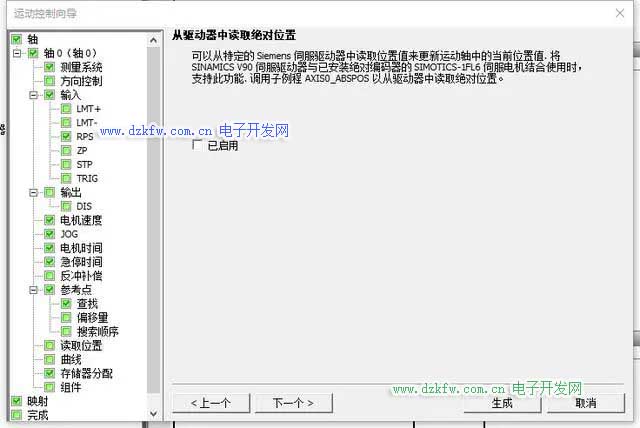
7Īó┴ŃļŖ╬╗╩╣ė├Ż¼ū▀Į^ī”(du©¼)╬╗ų├║═ŽÓī”(du©¼)╬╗ų├ų«Ū░ę╗Č©ę¬Č©┴x║├įŁ³c(di©Żn)Ż¼Ę±ätĮ^ī”(du©¼)╬╗ų├║═ŽÓī”(du©¼)╬╗ų├▓╗▀\(y©┤n)ąąĪŻ
8Īó0├}ø_╬╗ų├Ż¼ę▓┐╔ęį╩╣ė├┤╦³c(di©Żn)Č©┴x0³c(di©Żn)ĪŻ
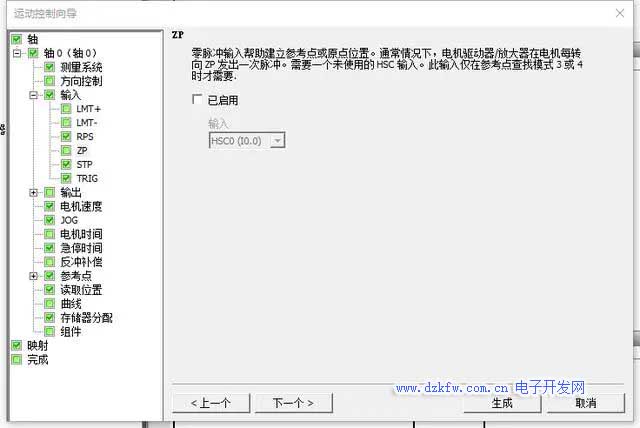
9Īó═Żų╣Ė∙ō■(j©┤)ąĶę¬▀xō±Ż¼═©▀^ķåūxSTPŠ═─▄└ĒĮŌ╩▓├┤ęŌ╦╝ĪŻ

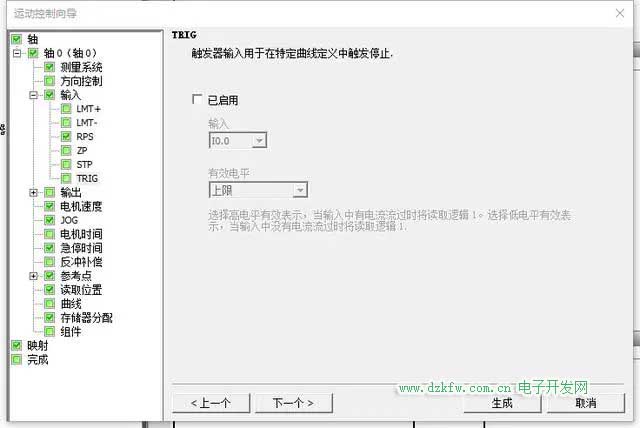
10Īó═Żų╣Ė∙ō■(j©┤)ąĶę¬▀xō±Ż¼═©▀^ķåūxTRIGŠ═─▄└ĒĮŌ╩▓├┤ęŌ╦╝ĪŻ
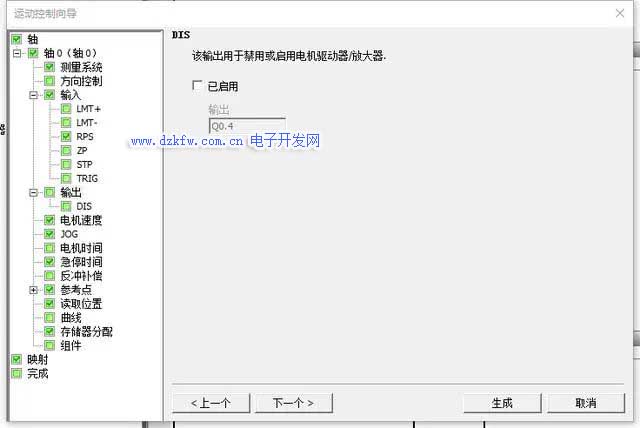
11ĪóĮ¹ė├Ė∙ō■(j©┤)ąĶę¬▀xō±Ż¼═©▀^ķåūxDISŠ═─▄└ĒĮŌ╩▓├┤ęŌ╦╝ĪŻ
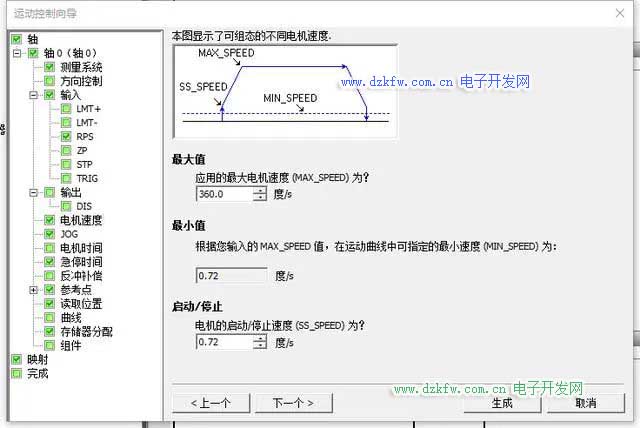
12ĪóūŅ┤¾╦┘Č╚║═ūŅąĪ╦┘Č╚Ė∙ō■(j©┤)¼F(xi©żn)ł÷(ch©Żng)ŪķørįO(sh©©)Č©Ż¼╬ęįO(sh©©)Č©ūŅ┤¾╦┘Č╚×ķ360Č╚/├ļĪŻ
13ĪóJOG├³┴Ņę▓Š═╩Ū╩ųäė(d©░ng)▀\(y©┤n)ąąŻ¼Ė∙ō■(j©┤)ąĶę¬įO(sh©©)Č©╦┘Č╚Ż¼Į©ūhįO(sh©©)Č©ąĪę╗ą®Ż¼┐┤┐┤▀\(y©┤n)ąą╦┘Č╚į┘š{(di©żo)š¹ĪŻ

14Īó┤╦╠ÄįO(sh©©)Č©╝ė£p╦┘Ģr(sh©¬)ķgŻ¼ę▓Š═╩Ū├}ø_▌ö│÷Ą─╝ė£p╦┘Ģr(sh©¬)ķgŻ¼Ė∙ō■(j©┤)¼F(xi©żn)ł÷(ch©Żng)ŪķørįO(sh©©)Č©ĪŻ
15Īó╝▒═Żča(b©│)āöĪŻ
16ĪóĘ┤ø_ča(b©│)āöŻ¼ę▓Š═╩ŪąŻ£╩(zh©│n)ĮzĖ▄ķgŽČĪŻ

17Īóģó┐╝³c(di©Żn)įO(sh©©)Č©
18Īóšę┴Ń³c(di©Żn)Ģr(sh©¬)╦┘Č╚║═ĘĮŽ“įO(sh©©)Č©ĪŻ
19ĪóŲ½ęŲ┴┐įO(sh©©)Č©

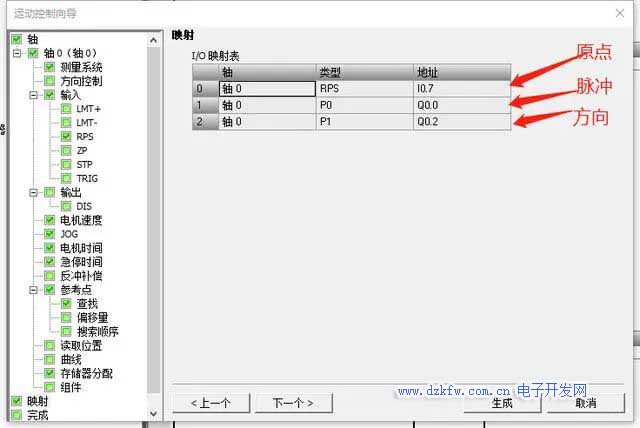
20Īó╦č╦„ģó┐╝³c(di©Żn)ĘĮ╩Į▀xō±

21ĪóÅ─“ī(q©▒)äė(d©░ng)Ų„ųąūx╚ĪĮ^ī”(du©¼)╬╗ų├
22ĪóŪ·ŠĆįO(sh©©)Č©Ż¼╬ę▀@└’ø]ė├Ū·ŠĆŻ¼ø]ėą╔·│╔Ū·ŠĆĪŻ
23Īó³c(di©Żn)"Į©ūh"ūįäė(d©░ng)Ęų┼õĄžųĘĪŻ

24ĪóĮM╝■
25Īóė│╔õ’@╩Š
26Īó═Ļ│╔Ż¼³c(di©Żn)ō¶╔·│╔Š══Ļ│╔┴╦ĪŻ
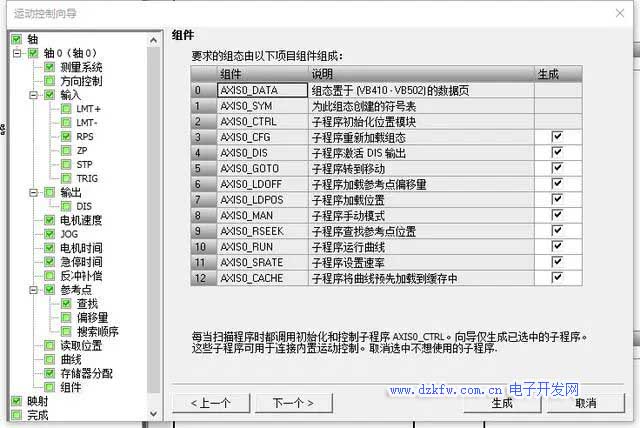
1Ż«åóė├▓ó│§╩╝╗»▌SAXISx_CTRLūė│╠ą“Ż©┐žųŲŻ®åóė├║═│§╩╝╗»▀\(y©┤n)äė(d©░ng)▌SŻ¼ĘĮĘ©╩Ūūįäė(d©░ng)├³┴Ņ▀\(y©┤n)äė(d©░ng)▌S├┐CPUĖ³Ė─×ķRUN─Ż╩ĮĢr(sh©¬)╝ė▌dĮMæB(t©żi)/Ū·ŠĆ▒ĒĪŻį┌ĒŚ(xi©żng)─┐ųąų╗ī”(du©¼)├┐Śl▀\(y©┤n)äė(d©░ng)▌S╩╣ė├┤╦ūė│╠ą“ę╗┤╬Ż¼▓ó┤_▒Ż│╠ą“Ģ■(hu©¼)į┌├┐┤╬Æ▀├ĶĢr(sh©¬)š{(di©żo)ė├┤╦ūė│╠ą“ĪŻ╩╣ė├SM0.0Ż©╩╝ĮKķ_åóŻ®ū„×ķENģóöĄ(sh©┤)Ą─▌ö╚ļĪŻ
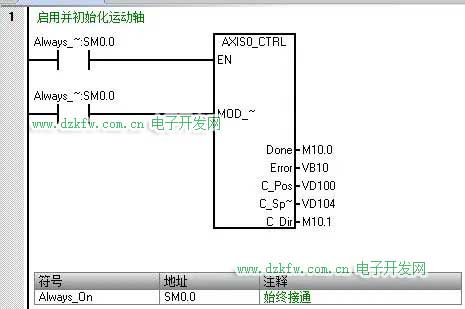
╣▄─_║¼┴xŻ║MODEŻ║?ji©Żn)óė├─ŻēKĪŻ1=┐╔░l(f©Ī)╦═├³┴ŅŻ╗0=ųąų╣▀M(j©¼n)ąąųąĄ─╚╬║╬├³┴ŅDoneŻ║═Ļ│╔ś╦(bi©Īo)ųŠ╬╗ErrorŻ║Õe(cu©░)š`┤·┤aŻ©ūų╣Ø(ji©”)Ż®C_PosŻ║▌SĄ─«ö(d©Īng)Ū░╬╗ų├Ż©Į^ī”(du©¼)Č©╬╗╗“š▀ŽÓī”(du©¼)Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Realą═öĄ(sh©┤)ō■(j©┤)Ż╗ŽÓī”(du©¼)├}ø_Ż║DINTą═öĄ(sh©┤)ō■(j©┤)C_SpeedŻ║▌SĄ─«ö(d©Īng)Ū░╦┘Č╚Ż¼Realą═öĄ(sh©┤)ō■(j©┤)C_DirŻ║▌SĄ─«ö(d©Īng)Ū░ĘĮŽ“Ż©1=Ę┤Ž“Ż¼0=š²Ž“Ż®2.╩ųäė(d©░ng)┐žųŲ▌SAXISx_MANūė└²│╠Ż©╩ųäė(d©░ng)─Ż╩ĮŻ®īó▀\(y©┤n)äė(d©░ng)▌Sų├×ķ╩ųäė(d©░ng)─Ż╩ĮĪŻ▀@į╩įSļŖÖC(j©®)░┤▓╗═¼Ą─╦┘Č╚▀\(y©┤n)ąąŻ¼╗“čžš²Ž“╗“žō(f©┤)Ž“┬²▀M(j©¼n)ĪŻį┌═¼ę╗Ģr(sh©¬)ķgāH─▄åóė├RUNĪóJOG_P╗“JOG_N▌ö╚ļų«ę╗ĪŻ
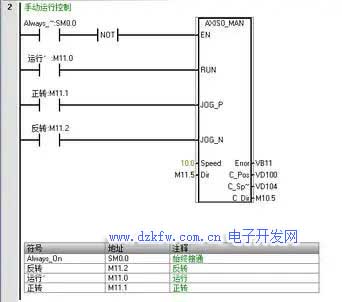
╣▄─_║¼┴xŻ║RUNŻ║1=▌S╩ųäė(d©░ng)▀\(y©┤n)ąąŻ©╦┘Č╚║═ĘĮŽ“Ęųäeė╔Speed║═Dir╣▄─_┐žųŲŻ®0=═Żų╣╩ųäė(d©░ng)┐žųŲJOG_PŻ║1=š²▐D(zhu©Żn)³c(di©Żn)äė(d©░ng)┐žųŲJOG_NŻ║1=Ę┤▐D(zhu©Żn)³c(di©Żn)äė(d©░ng)┐žųŲSpeedŻ║RUN▀\(y©┤n)ąąĢr(sh©¬)Ą──┐ś╦(bi©Īo)╦┘Č╚Ż¼Realą═öĄ(sh©┤)ō■(j©┤)DirŻ║RUN▀\(y©┤n)ąąĢr(sh©¬)Ą─ĘĮŽ“ErrorŻ║Õe(cu©░)š`┤·┤aŻ©ūų╣Ø(ji©”)Ż®C_PosŻ║▌S«ö(d©Īng)Ū░╬╗ų├Ż©Į^ī”(du©¼)Č©╬╗╗“š▀ŽÓī”(du©¼)Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Realą═öĄ(sh©┤)ō■(j©┤)Ż╗ŽÓī”(du©¼)├}ø_Ż║DINTą═öĄ(sh©┤)ō■(j©┤)C_SpeedŻ║▌S«ö(d©Īng)Ū░╦┘Č╚Ż¼Realą═öĄ(sh©┤)ō■(j©┤)C_DirŻ║▌SĄ─«ö(d©Īng)Ū░ĘĮŽ“Ż©1=Ę┤Ž“Ż¼0=š²Ž“Ż®3Īó▓ķšęģó┐╝³c(di©Żn)ū▀Į^ī”(du©¼)╬╗ų├║═ŽÓī”(du©¼)╬╗ų├Ū░ąĶ꬚ęĄĮšµīŹ(sh©¬)Ą─┴Ń³c(di©Żn)Ż¼Į^ī”(du©¼)╬╗ų├║═ŽÓī”(du©¼)╬╗ų├▓┼─▄Ė∙ō■(j©┤)┴Ń³c(di©Żn)▀\(y©┤n)ąąĪŻAXISx_RSEEKūė│╠ą“Ż©╦č╦„ģó┐╝³c(di©Żn)╬╗ų├Ż®╩╣ė├ĮMæB(t©żi)/Ū·ŠĆ▒ĒųąĄ─╦č╦„ĘĮĘ©åóäė(d©░ng)ģó┐╝³c(di©Żn)╦č╦„▓┘ū„ĪŻ▀\(y©┤n)äė(d©░ng)▌SšęĄĮģó┐╝³c(di©Żn)Ūę▀\(y©┤n)äė(d©░ng)═Żų╣║¾Ż¼▀\(y©┤n)äė(d©░ng)▌SīóRP_OFFSETģóöĄ(sh©┤)ųĄ▌d╚ļ«ö(d©Īng)Ū░╬╗ų├ĪŻ

╣▄─_║¼┴xŻ║STARTŻ║├┐Įė═©ę╗éĆ(g©©)Æ▀├Ķų▄Ų┌Ż¼Š═ł╠(zh©¬)ąąę╗┤╬▓ķšęģó┐╝³c(di©Żn)Ż©ģó┐╝³c(di©Żn)▓ķšęĘĮ╩Įė╔▌SĮMæB(t©żi)┤_Č©Ż®DoneŻ║═Ļ│╔ś╦(bi©Īo)ųŠ╬╗ErrorŻ║Õe(cu©░)š`┤·┤aŻ©ūų╣Ø(ji©”)Ż®4.Į^ī”(du©¼)╗“š▀ŽÓī”(du©¼)Č©╬╗AXISx_GOTOūė│╠ą“├³┴Ņ▀\(y©┤n)äė(d©░ng)▌S▐D(zhu©Żn)ĄĮ╦∙ąĶ╬╗ų├ĪŻ
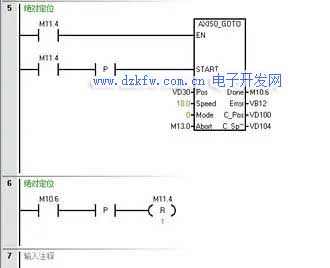
╣▄─_║¼┴xŻ║STARTŻ║├┐Įė═©ę╗éĆ(g©©)Æ▀├Ķų▄Ų┌Ż¼Š═ł╠(zh©¬)ąąę╗┤╬Č©╬╗PosŻ║─┐ś╦(bi©Īo)╬╗ų├Ż©Į^ī”(du©¼)Č©╬╗×ķū°ś╦(bi©Īo)³c(di©Żn)Ż¼ŽÓī”(du©¼)Č©╬╗×ķā╔³c(di©Żn)ķgŠÓļxŻ®Ż¼╣ż│╠å╬╬╗Ż║Realą═öĄ(sh©┤)ō■(j©┤)Ż╗ŽÓī”(du©¼)├}ø_Ż║DINTą═öĄ(sh©┤)ō■(j©┤)SpeedŻ║─┐ś╦(bi©Īo)╦┘Č╚Ż¼Realą═öĄ(sh©┤)ō■(j©┤)MODEŻ║ęŲäė(d©░ng)─Ż╩Į0Ż║Į^ī”(du©¼)╬╗ų├ 1Ż║ŽÓī”(du©¼)╬╗ų├ 2Ż║?ji©Żn)╬╦┘▀B└m(x©┤) š²Ž“ą²▐D(zhu©Żn) 3Ż║?ji©Żn)╬╦┘▀B└m(x©┤)Ę┤Ž“ą²▐D(zhu©Żn)AbortŻ║═Żų╣š²į┌ł╠(zh©¬)ąąĄ─▀\(y©┤n)äė(d©░ng)DoneŻ║═Ļ│╔ś╦(bi©Īo)ųŠ╬╗ErrorŻ║Õe(cu©░)š`┤·┤aŻ©ūų╣Ø(ji©”)Ż®C_PosŻ║▌S«ö(d©Īng)Ū░╬╗ų├Ż©Į^ī”(du©¼)Č©╬╗╗“š▀ŽÓī”(du©¼)Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Realą═öĄ(sh©┤)ō■(j©┤)Ż╗ŽÓī”(du©¼)├}ø_Ż║DINTą═öĄ(sh©┤)ō■(j©┤)C_SpeedŻ║▌S«ö(d©Īng)Ū░╦┘Č╚Ż¼Realą═öĄ(sh©┤)ō■(j©┤)

 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō(y©©)├µ
╦óą┬Ēō(y©©)├µ Ž┬ĄĮĒō(y©©)Ąū
Ž┬ĄĮĒō(y©©)Ąū