
į┌╔Žę╗Ų¬Ą─╦┘Č╚PID┐žųŲĄ─╬─š┬ųąŻ¼╬ęéāęčĮøĮķĮB┴╦ĻPė┌PIDųĖ┴Ņęį╝░ŽÓĻPģóöĄĄ─Š▀¾wæ¬ė├ĪŻ╦∙ęį▒ŠŲ¬╬─š┬Ż¼ų„ę¬╩ŪĮo│÷│╠ą“▓┐ĘųĪŻ

╚²┴ŌPLC─ŻöM┴┐īŹ└²╚²┴ŌFX3UŽĄ┴ąĪ¬FX3U-4AD─ŻöM┴┐,FX3U-4AD─ŻöM┴┐▌ö╚ļ─ŻēK║åĮķ
www.shkcfs.com/Article/MITSUBISHI/9849.html
╚²┴ŌFX3U-4AD─ŻēK╚ń║╬ūx│÷─ŻöM┴┐öĄō■?╚²┴ŌFX3U-4AD─ŻöM┴┐ļŖē║▌ö╚ļ▓╔╝»īŹ└²
www.shkcfs.com/Article/MITSUBISHI/10080.html

╚²┴Ōplc─ŻöM┴┐ŠÄ│╠ FX3U-4AD─ŻēKĄ─╩╣ė├ĘĮĘ©
www.shkcfs.com/Article/tixingtu/9585.html
╩ūŽ╚į┌Įo│÷│╠ą“ų«Ū░Ż¼╬ęéāŽ╚┴╦ĮŌę╗Ž┬ęįŽ┬ÄūéĆĖ┼─ŅŻ║
1.╩ąļŖļŖē║Ą─▀^┴ŃąįŻ║╬ęéāŲĮ│Żį┌ė├Ą─╩ąļŖļŖē║×ķĮ╗┴„220VŻ¼╦³Ą─Ņl┬╩╩Ū50HZŻ¼ę“┤╦1├ļĘNā╚Ż¼╦³Ģ■│÷¼F50éĆš²Žę▓©ą╬Ż¼Ą├│÷├┐éĆ▓©ą╬Ą─ų▄Ų┌╩Ū20msŻ¼Č°▀^┴ŃąįĄ─¼FŽ¾Š═╩ŪŻ║«öį┌├┐éĆ╔Ž░ļ▓©ą╬╗“š▀Ž┬░ļ▓©ą╬ā╚Ż¼╚ń╣¹┤╦Ģr╣╠æB└^ļŖŲ„ąĶę¬ĻPöÓ╗“š▀ī¦═©Ż¼─Ū├┤╩Ū▓╗─▄±R╔ŽĻPöÓ╗“š▀ī¦═©Ą─Ż¼▒žĒÜĄ╚ĄĮ▀^┴╦Ž┬ę╗éĆ┴Ń³c║¾Ż¼▓┼─▄ĻPöÓ╗“š▀ī¦═©ĪŻę“┤╦Ż¼╬ęéā«ö╬ęéāė├╣╠æB└^ļŖŲ„┐žųŲ╩ąļŖĢrŻ¼▒žĒÜ┐╝æ]īóī¦═©Ģrķg┤¾ė┌10msĪŻ
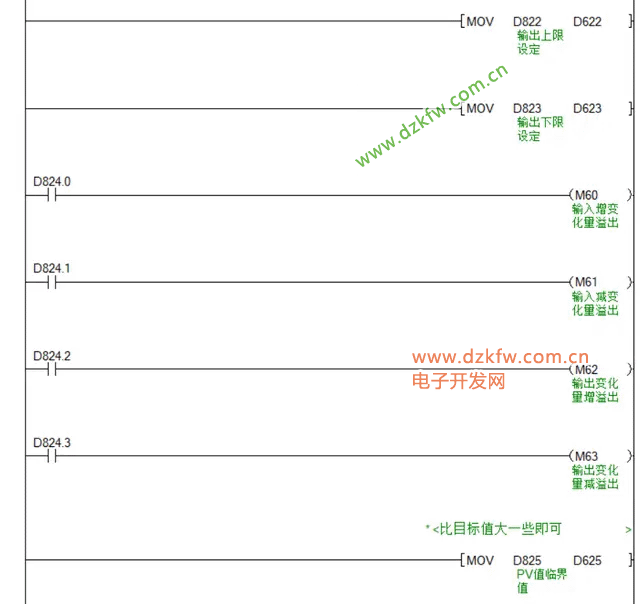
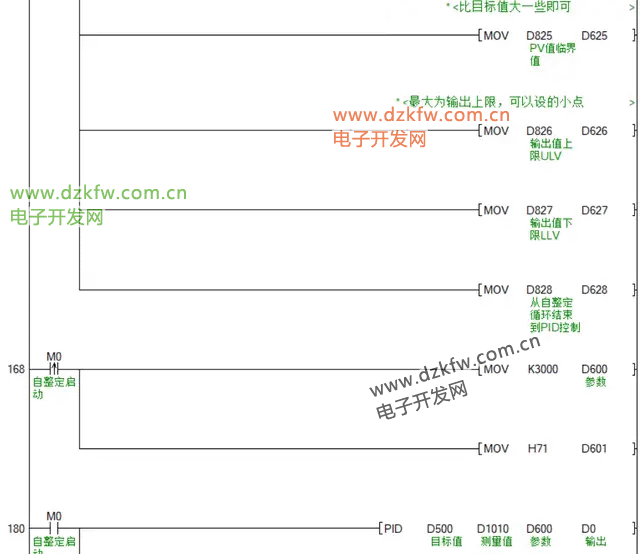
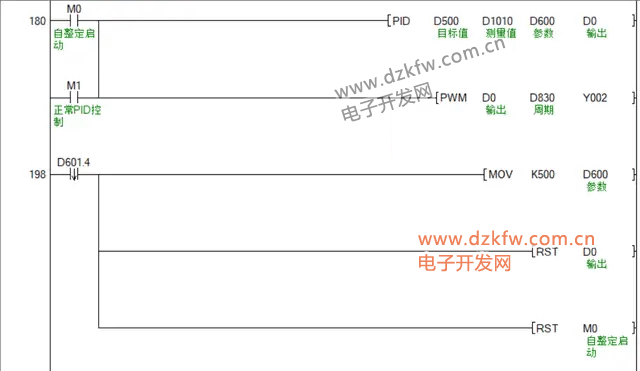
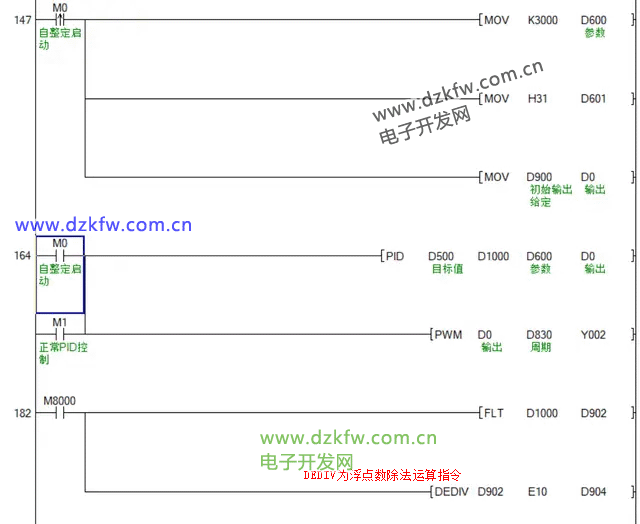
2.PWMųĖ┴ŅŻ║PWM S1 S2 DŻ¼ŲõųąS1╩Ū├}īÆŻ¼S2╩Ūų▄Ų┌Ż¼╦³éāĄ─å╬╬╗Č╝╩ŪmsĪŻ╦∙ęįĖ∙ō■╔Ž├µšfĄ─▀^┴ŃąįŻ¼S1Ą─ųĄ▒žĒÜ┤¾ė┌10▓┼ąąĪŻS1➗S2✖️Ņ~Č©╣”┬╩īŹĢr▌ö│÷╣”┬╩Ż¼«öS1S2ĢrŻ¼Š═╩Ū╚½╣”┬╩▀\ąąĪŻ┴Ē═ŌŻ¼S2▓╗─▄▀^ķLŻ¼ę“×ķ╦³╩Ūęįms×ķå╬╬╗Ż¼▒╚╚ńŻ¼īóS1įOų├×ķ1000Ż¼S2įOų├×ķ10000Ż¼┐┤╦Ų║▄║Ž└ĒŻ¼▌ö│÷╣”┬╩10%Ż¼ĖąėX─▄░č╦«╝ė¤ßŻ¼Ą½╩ŪīŹļHŪķør╩ŪŻ¼1├ļ╝ė¤ßŻ¼99├ļ▓╗╝ė¤ßŻ¼─Ū─ŃšfŻ¼▀@─▄╝ė¤ßĄĮ─┐ś╦£žČ╚å߯┐’@╚╗▓╗ąąĪŻ╦∙ęįŻ¼ę╗░Ń╬ęéāīóS2įOų├│╔1000ĪŻ
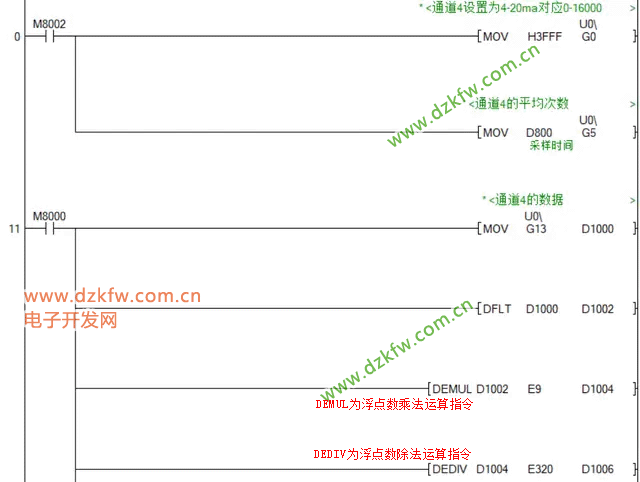
║├┴╦Ż¼╬ęéāčįÜwš²é„Ż¼Ž┬├µ╩ŪFX3U-4AD─ŻēKģóöĄįOų├Ż║
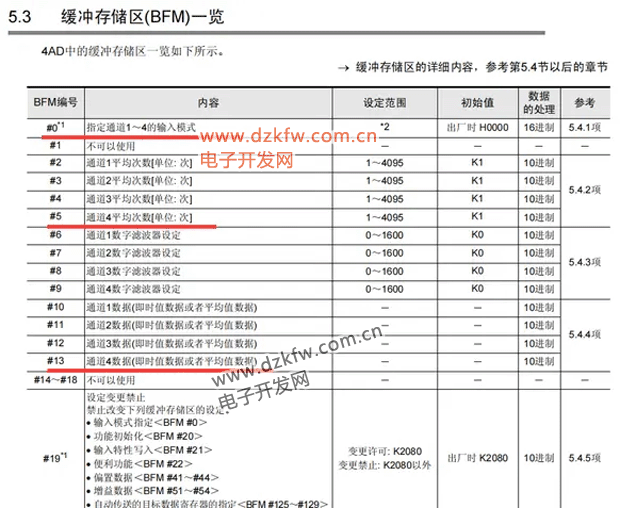
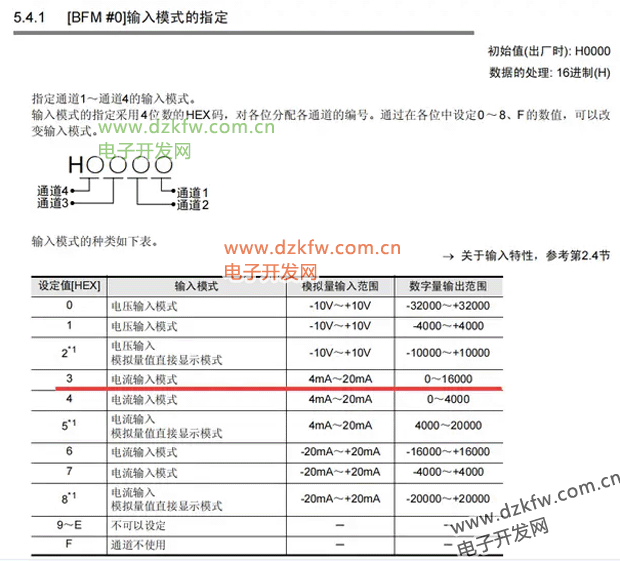
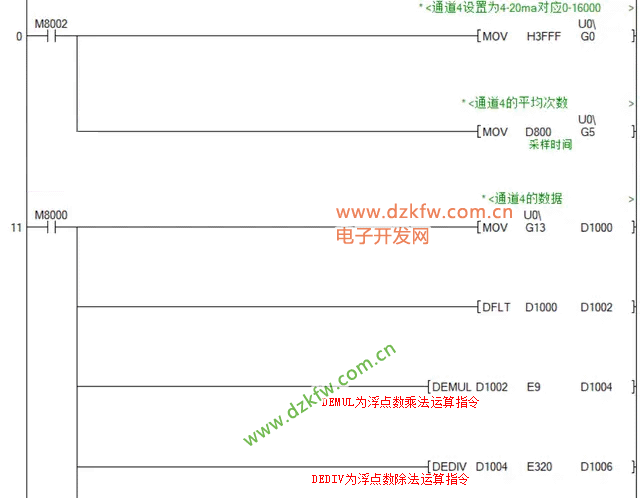
#0Ż║ė╔ė┌╬ęĄ─£žČ╚ūā╦═Ų„╩Ū4-20maĄ─┴┐│╠Ż¼ę“┤╦╬ęéāīó4╠¢═©Ą└įOų├│╔3ĪŻ
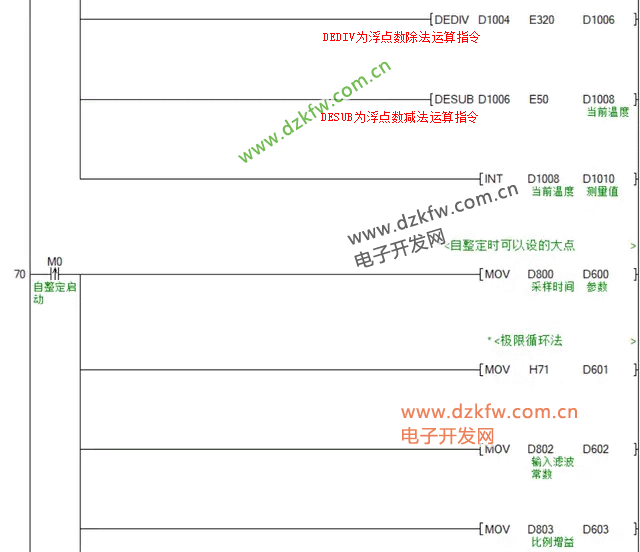
#5Ż║╬ęéā▀xō±ŲĮŠ∙┤╬öĄŻ¼ŲĮŠ∙┤╬öĄĖ∙ō■ąĶŪ¾üĒŻ¼┐╔ęįįOĄ─┤¾³cŻ¼▀@śė£žČ╚ūā╗»Š═─▄ĘĆČ©ę╗ą®ĪŻ
#13Ż║═©Ą└4Ą─īŹĢr£žČ╚öĄō■ĪŻ
ė▓╝■ĮėŠĆŻ║ų„ę¬╩Ū4AD║═£žČ╚ūā╦═Ų„Ą─ĮėŠĆĪŻ╣╠æB└^ļŖŲ„Ą─╠½║åå╬Ż¼Š═▓╗«ŗ│÷üĒ┴╦ĪŻ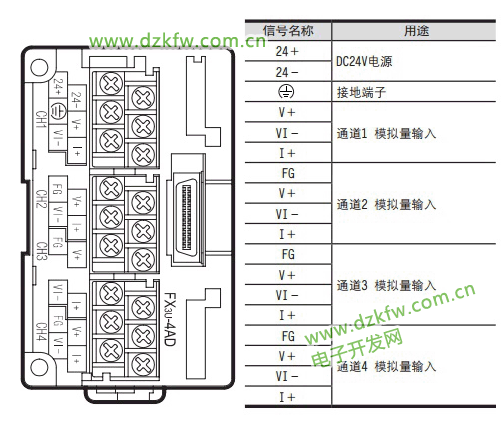
FX3U-4AD─ŻēKĄ─Č╦ūėČ©┴x
─ŻöM┴┐╦ŃĘ©Ż║
4AD▌ö╚ļĄ─╩Ū4ma-20maŻ¼ī”æ¬┴┐│╠╩Ū0-16000ĪŻ
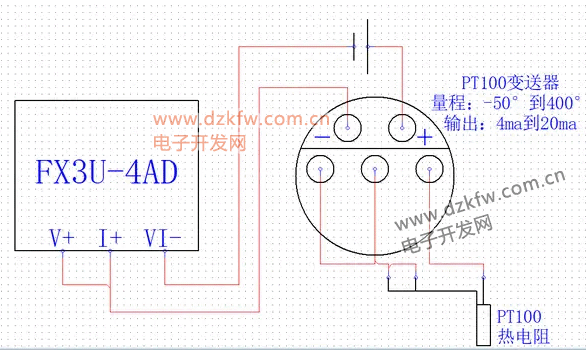
£žČ╚ūā╦═Ų„ę▓╩Ū4ma-20maŻ¼ī”æ¬┴┐│╠╩Ū-50ĪŃĄĮ400ĪŃĪŻ
ę“┤╦╬ęéāų▒Įė┬į▀^4ma-20ma▀@ĮMöĄō■Ż¼ų▒Įėūī0-16000║═-50ĪŃ-400ĪŃ▀Mąą±Ņ║ŽĪŻ
Ė∙ō■ą▒┬╩ĘĮ│╠╩Įy=kx+bŻ¼╚╗║¾Ą├ĄĮā╔ĮM┴ą╦Ń╩ĮŻ║
-50=0*k+b
400=16000*k+b
ūŅ║¾Ą├│÷£žČ╚Ą─ėŗ╦Ń╣½╩ĮŻ║«öŪ░£žČ╚=Ż©#13╠¢öĄō■*9Ż®/320-50
ėą┴╦╔Ž├µĄ─╣½╩ĮŻ¼╬ęéāŠ═┐╔ęį▀MąąŠÄ│╠┴╦Ż¼Ž┬├µĢ■┘N│÷2ĘNūįš¹Č©Ą─ĘĮĘ©Ż║
ī”┴╦Ż¼╠ßę╗ŠõŻ║╝ė¤ß╩Ū─µäėū„Ż¼ųŲ└õ╩Ūš²äėū„ŻĪ
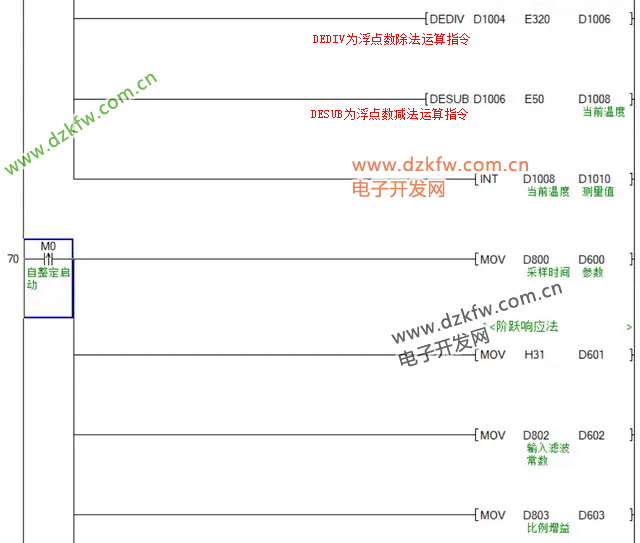
╚²┴ŌPLCĄ─ĖĪ³cöĄėŗ╦ŃĘĮĘ©╩Š└²Ż║
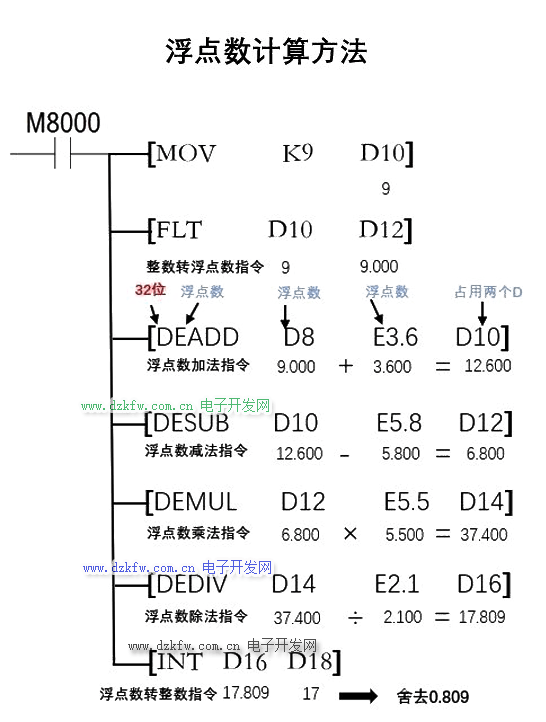
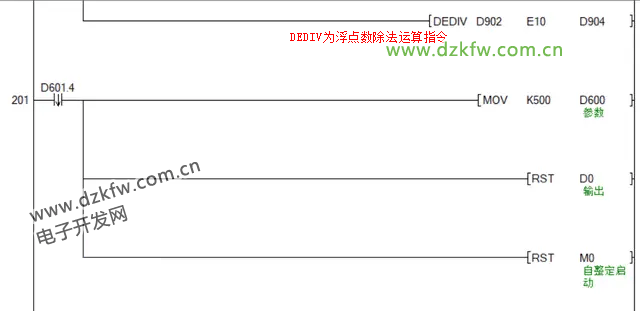
DEMUL×ķĖĪ³cöĄ│╦Ę©▀\╦ŃųĖ┴ŅŻ╗DEDIV×ķĖĪ³cöĄ│²Ę©▀\╦ŃųĖ┴ŅŻ╗
INTė├ė┌īóŲõ╦¹öĄō■ŅÉą═Ż©╚ńĖĪ³cöĄŻ®▐DōQ×ķš¹öĄŅÉą═Ż╗
į┌╚²┴ŌPLCųąŻ¼U0\G0╩Ūė├ė┌┼õų├╠ž╩Ō╣”─▄─ŻēKŻ©╚ń─ŻöM┴┐▌ö╚ļ/▌ö│÷─ŻēKŻ®ģóöĄĄ─ĄžųĘ▒Ē╩ŠĘĮĘ©Ż¼Š▀¾w║¼┴x╚ńŽ┬Ż║
-
ĮYśŗĮŌ╬÷
- UŻ║┤·▒Ē╠ž╩Ō╣”─▄─ŻēKĄ─╬╗ų├ŠÄ╠¢Ż©╚ńU0×ķĄ┌ę╗éĆ╠ž╩Ō─ŻēKŻ®ĪŻ
- GŻ║┤·▒Ē─ŻēKā╚▓┐Ą─╝─┤µŲ„ĄžųĘŻ©╚ńG0ī”æ¬─ŻēKā╚▓┐Ą─╠žČ©ģóöĄįOų├ĄžųĘŻ®ĪŻ
- \Ż║ĘųĖ¶Ę¹Ż¼ė├ė┌ģ^Ęų─ŻēK╬╗ų├║═╝─┤µŲ„ĄžųĘĪŻ
-
ė├═Š
- U0\G0═©│Żė├ė┌įOų├╠ž╩Ō╣”─▄─ŻēKĄ─ģóöĄŻ¼└²╚ńŻ║
- ═©Ą└ŅÉą═Ż©ļŖē║/ļŖ┴„▌ö╚ļŻ®Īóą┼╠¢ĘČć·Ą╚ĪŻ
- ŲĮŠ∙┤╬öĄĪó×V▓©įOų├Ą╚ĪŻ
- └²╚ńŻ¼į┌─ŻöM┴┐▌ö╚ļ─ŻēKųąŻ¼U0\G0┐╔─▄ė├ė┌įOų├═©Ą└1Ą─ą┼╠¢ŅÉą═×ķļŖē║▌ö╚ļŻ©0~10Vī”æ¬öĄō■ĘČć·0~10000Ż®ĪŻ
- U0\G0═©│Żė├ė┌įOų├╠ž╩Ō╣”─▄─ŻēKĄ─ģóöĄŻ¼└²╚ńŻ║
-
╩Š└²æ¬ė├
- │╠ą“╩Š└²ųą│ŻęŖė├Ę©Ż║
MOV HFFF2 U0/G0 ; įOų├═©Ą└1×ķļŖē║▌ö╚ļŻ©ī”æ¬HFFF2×ķ╩«┴∙▀MųŲ│ŻöĄŻ®
- ═©▀^U0\GxŻ©x×ķ╝─┤µŲ„ĄžųĘŻ®ų▒ĮėįLå¢─ŻēKā╚▓┐ģóöĄŻ¼║å╗»┴╦ųĖ┴ŅŠÄīæĪŻ
- │╠ą“╩Š└²ųą│ŻęŖė├Ę©Ż║
-
▀mė├ĘČć·
- įōšZĘ©▀mė├ė┌╚²┴ŌFX3UŽĄ┴ą╝░ų«║¾Ą─PLCą═╠¢ĪŻ
╩ūŽ╚╩ŪśOŽ▐裣hĘ©Ż║
ūŅ║¾╩ŪļA▄SĒææ¬Ę©Ż║
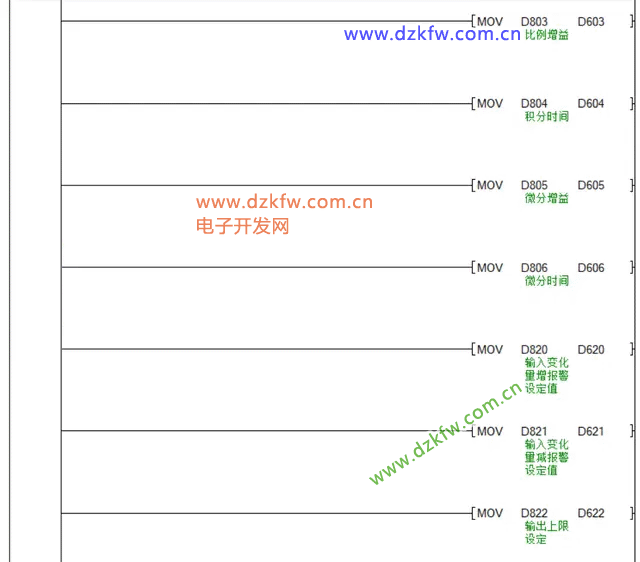

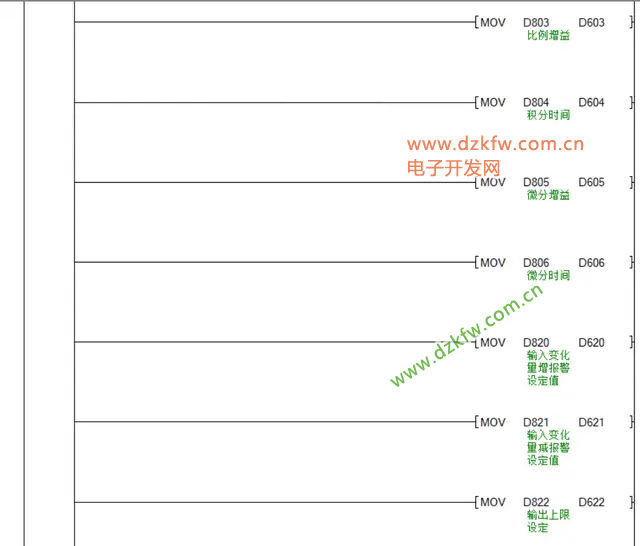
ūŅ║¾Ż¼▀@ų╗╩Ūę╗éĆ£ž┐žPIDĄ─┐“╝▄Ż¼Š▀¾wPIDģóöĄĄ─įOų├Ż¼▀Ć╩ŪĄ├ę└┐┐ūį╝║Ą─Įø“ׯ¼į┘ĮY║Žūįš¹Č©ģóöĄŻ¼Ė∙ō■¼Fł÷Ūķør▀Mąąą▐Ė─ĪŻ
ĖĮPIDģóöĄš{š¹┐┌įEŻ║
ģóöĄš¹Č©šęūŅ╝čŻ¼Å─ąĪĄĮ┤¾Ēśą“▓ķŻ╗
Ž╚╩Ū▒╚└²║¾ĘeĘųŻ¼ūŅ║¾į┘░č╬óĘų╝ėŻ╗
Ū·ŠĆš±╩Ä║▄ŅlĘ▒Ż¼▒╚└²Č╚▒Pę¬Ę┼┤¾Ż╗
Ū·ŠĆŲ»ĖĪ└@┤¾×│Ż¼▒╚└²Č╚▒P═∙ąĪ░ŌŻ╗
Ū·ŠĆŲ½ļx╗žÅ═┬²Ż¼ĘeĘųĢrķg═∙Ž┬ĮĄŻ╗
Ū·ŠĆ▓©äėų▄Ų┌ķLŻ¼ĘeĘųĢrķgį┘╝ėķLŻ╗
Ū·ŠĆš±╩ÄŅl┬╩┐ņŻ¼Ž╚░č╬óĘųĮĄŽ┬üĒŻ╗
äė▓Ņ┤¾üĒ▓©äė┬²ĪŻ╬óĘųĢrķgæ¬╝ėķLŻ╗
└ĒŽļŪ·ŠĆā╔éĆ▓©Ż¼Ū░Ė▀║¾Ą═╦─▒╚ę╗Ż╗
ę╗┐┤Č■š{ČÓĘų╬÷Ż¼š{╣Ø┘|┴┐▓╗Ģ■Ą═Ż╗
╚¶ę¬Ę┤æ¬į÷┐ņŻ¼į÷┤¾P£pąĪIŻ╗
╚¶ę¬Ę┤欣p┬²Ż¼£pąĪPį÷┤¾IŻ╗
╚ń╣¹▒╚└²╠½┤¾Ż¼Ģ■ę²ŲŽĄĮyš╩ÄŻ╗
╚ń╣¹ĘeĘų╠½┤¾Ż¼Ģ■ę²ŲŽĄĮy▀tŌgĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū