
S7-200 PTOŽ“ī¦ęŲų▓ų┴ S7-200 SMART ▀\äė┐žųŲŻ¼ęŲų▓ĢrąĶę¬į┌ S7-200 SMART ųąųžą┬▀\ąą▀\äė┐žųŲŽ“ī¦ŠÄ│╠ĪŻ
S7-200 SMART ▀\äė┐žųŲŽ“ī¦Ą─£y┴┐ŽĄĮy▀xō±ŽÓī”├}ø_Ż¼╚ńłD1╦∙╩ŠŻ║
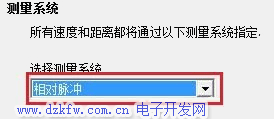
łD1. ▀xō±£y┴┐ŽĄĮy
S7-200 SMART ▀\äė┐žųŲŽ“ī¦Ą─ĘĮŽ“┐žųŲĖ∙ō■īŹļHŪķør┐╔ęį▀xō±Ī░å╬ŽÓŻ©1éĆ▌ö│÷Ż®Ī▒╗“š▀Ī░å╬ŽÓŻ©2éĆ▌ö│÷Ż®Ī▒Ż¼Ī░å╬ŽÓŻ©2éĆ▌ö│÷Ż®Ī▒ėąĘĮŽ“┐žųŲŻ¼╚ńłD2╦∙╩ŠŻ║
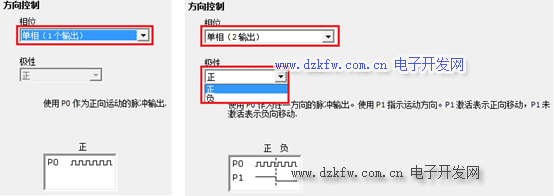
łD2. ▀xō±ĘĮŽ“┐žųŲ
CTRLųĖ┴ŅęŲų▓
PTOx_CTRLųĖ┴Ņė╔AXISx_CTRL ųĖ┴Ņ╠µōQŻ¼╚ńłD3╦∙╩ŠŻ║
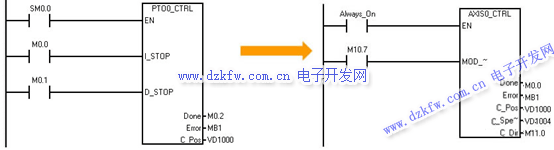
łD3. CTRLųĖ┴ŅęŲų▓
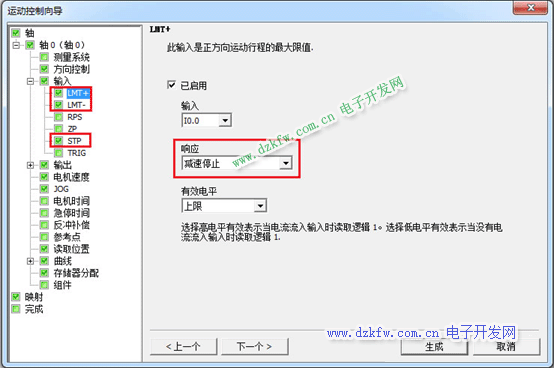
1Īó I_STOPģóöĄŻ¼į┌S7-200SMART▀\äė┐žųŲŽ“ī¦ųąĖ∙ō■īŹļHŪķøråóė├LMT+Ż©š²Ž▐╬╗Ż®ĪóLMT-Ż©žōŽ▐╬╗Ż®ĪóSTPŻ©═Żų╣³cŻ®DI³cŻ¼▀xō±Ēææ¬×ķĪ░┴ó╝┤═Żų╣Ī▒
╚ńłD4╦∙╩ŠĪŻ╚ń╣¹┴ó╝┤═Żų╣×ķā╚▓┐ūā┴┐Ż¼┐╔ęįīóįōā╚▓┐ūā┴┐═©▀^DO³c┐žųŲDI³cīŹ¼FĪŻ
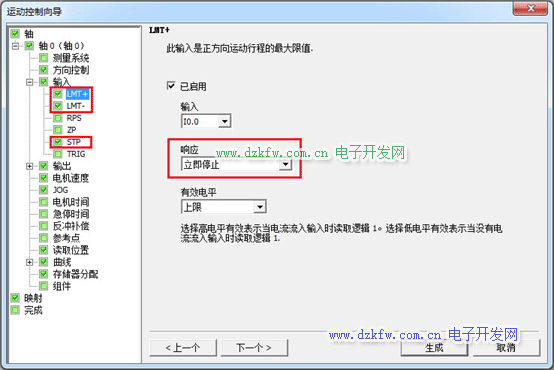
łD4. ┴ó╝┤═Żų╣
2Īó D_STOPģóöĄŻ¼į┌S7-200SMART▀\äė┐žųŲŽ“ī¦ųąĖ∙ō■īŹļHŪķøråóė├LMT+Ż©š²Ž▐╬╗Ż®ĪóLMT-Ż©žōŽ▐╬╗Ż®ĪóSTPŻ©═Żų╣³cŻ®DI³cŻ¼▀xō±Ēææ¬×ķĪ░£p╦┘═Żų╣Ī▒
╚ńłD5╦∙╩ŠĪŻ╚ń╣¹£p╦┘═Żų╣×ķā╚▓┐ūā┴┐Ż¼┐╔ęį╩╣ė├MOD_ENģóöĄ╠µōQĪŻ
łD5. £p╦┘═Żų╣
MANųĖ┴ŅęŲų▓
PTOx_MAN ųĖ┴Ņė╔ AXISx_MAN ųĖ┴Ņ╠µōQŻ¼╚ńłD6╦∙╩ŠŻ║
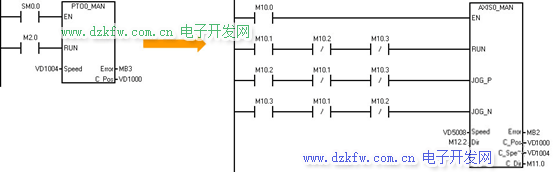
łD6. MANųĖ┴ŅęŲų▓
1Īó═¼ę╗Ģr┐╠āH─▄åóė├RUNĪóJOG_P╗“JOG_NųąĄ─ę╗éĆ├³┴ŅŻ╗
2Īó╚ń╣¹Ė─ūāĘĮŽ“ąĶŽ╚Ė─ūāDirģóöĄį┘åóė├RUNŻ¼Dir=0Ģr×ķš²Ž“ĪŻ
RunųĖ┴ŅęŲų▓
PTOx_RUNųĖ┴Ņė╔AXISx_RUNųĖ┴Ņ╠µōQŻ¼╚ńłD7╦∙╩ŠŻ║
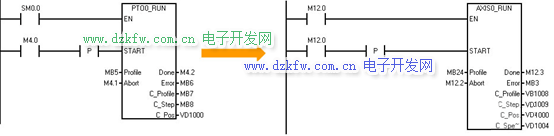
łD7. RUNųĖ┴ŅęŲų▓
1ĪóS7-200ūŅČÓ25éĆ░³ĮjŻ¼├┐éĆ░³ĮjūŅČÓ29▓ĮŻ¼S7-200SMART ūŅČÓ32éĆ░³ĮjŻ¼├┐éĆ░³ĮjūŅČÓ16▓ĮŻ╗
2ĪóS7-200░³ĮjČ©┴x×ķĪ░å╬╦┘▀B└mą²▐DĪ▒Ūę╩╣ė├PTOx_ADVųĖ┴Ņ║¾└^└m░l╦═ųĖČ©├}ø_═Żų╣╣”─▄Ż¼į┌S7-200SMART ┐╔ęį╩╣ė├RPS▌ö╚ļ³c═Żų╣Ż¼┐╔ęį═©▀^DO³c┐žųŲRPS▌ö╚ļ³cīŹ¼FŻ¼╚ńłD8╦∙╩ŠŻ║
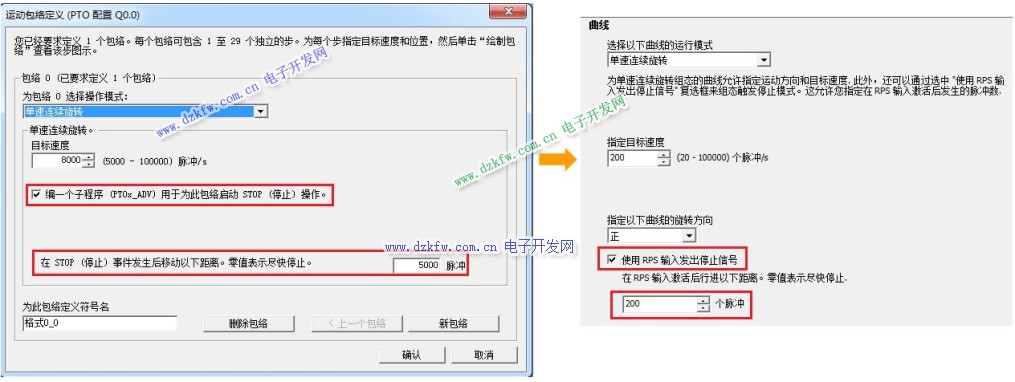
łD8. PTOx_ADV ╣”─▄ęŲų▓
LDPOSųĖ┴ŅęŲų▓
PTOx_LDPOS ųĖ┴Ņė╔ AXISx_LDPOS ųĖ┴Ņ╠µōQŻ¼╚ńłD9╦∙╩ŠŻ║
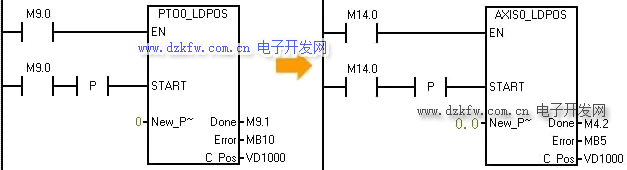
łD9.PTOx_LDPOS ųĖ┴ŅęŲų▓
ęį╔ŽŠ═╩Ū▀\äė┐žųŲĄ─ęŲų▓▀^│╠ŻĪŻĪŻĪ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū