
01ĪóPID┐žųŲų¬ūR(sh©¬)ųvĮŌ
S7-200 SMART─▄ē“▀M(j©¼n)ąąPID┐žųŲĪŻS7-200 SMART CPUūŅČÓ┐╔ęįų¦│ų8éĆ(g©©)PID┐žųŲ╗ž┬ĘŻ©8éĆ(g©©)PIDųĖ┴Ņ╣”─▄ēKŻ®
PID╩Ūķ]Łh(hu©ón)┐žųŲŽĄĮy(t©»ng)Ą─Ż©▒╚└²ŻŁĘeĘųŻŁ╬óĘųŻ®
PID┐žųŲŲ„Ė∙ō■(j©┤)įO(sh©©)Č©ųĄŻ©ĮoČ©Ż®┼c▒╗┐žī”Ž¾Ą─īŹ(sh©¬)ļHųĄŻ©Ę┤üŻ®Ą─▓ŅųĄŻ¼░┤ššPID╦ŃĘ©ėŗ(j©¼)╦Ń│÷┐žųŲŲ„Ą─▌ö│÷┴┐Ż¼┐žųŲł╠(zh©¬)ąąÖC(j©®)śŗ(g©░u)╚źė░Ēæ▒╗┐žī”Ž¾Ą─ūā╗»ĪŻ
PID┐žųŲ╩Ūžō(f©┤)Ę┤üķ]Łh(hu©ón)┐žųŲŻ¼─▄ē“ęųųŲŽĄĮy(t©»ng)ķ]Łh(hu©ón)ā╚(n©©i)Ą─Ė„ĘNę“╦ž╦∙ę²ŲĄ─ö_äė(d©░ng)Ż¼╩╣Ę┤üĖ·ļSĮoČ©ūā╗»ĪŻ
Ė∙ō■(j©┤)Š▀¾wĒŚ(xi©żng)─┐Ą─┐žųŲę¬Ū¾Ż¼į┌īŹ(sh©¬)ļHæ¬(y©®ng)ė├ųąėą┐╔─▄ė├ĄĮŲõųąĄ─ę╗▓┐ĘųŻ¼▒╚╚ń│Żė├Ą─╩ŪPIŻ©▒╚└²ŻŁĘeĘųŻ®┐žųŲŻ¼▀@Ģr(sh©¬)ø]ėą╬óĘų┐žųŲ▓┐ĘųĪŻ
PID╦ŃĘ©į┌S7-200 SMARTųąĄ─īŹ(sh©¬)¼F(xi©żn)PID┐žųŲūŅ│§į┌─ŻöM┴┐┐žųŲŽĄĮy(t©»ng)ųąīŹ(sh©¬)¼F(xi©żn)Ż¼ļSų°ļx╔ó┐žųŲ└ĒšōĄ─░l(f©Ī)š╣Ż¼PIDę▓į┌ėŗ(j©¼)╦ŃÖC(j©®)╗»┐žųŲŽĄĮy(t©»ng)ųąīŹ(sh©¬)¼F(xi©żn)ĪŻ
02ĪóPIDŽ“?q©▒)¦ĮMæB(t©żi)įO(sh©©)ų├
Micro/WIN SMART╠ß╣®┴╦PID WizardŻ©PIDųĖ┴ŅŽ“?q©▒)¦Ż®Ż¼┐╔ęįÄ═ų·ė├æ¶ĘĮ▒ŃĄž╔·│╔ę╗éĆ(g©©)ķ]Łh(hu©ón)┐žųŲ▀^│╠Ą─PID╦ŃĘ©ĪŻ┤╦Ž“?q©▒)¦┐╔ęį═Ļ│╔Į^┤¾ČÓöĄ(sh©┤)PID▀\(y©┤n)╦ŃĄ─ūįäė(d©░ng)ŠÄ│╠Ż¼ė├æ¶ų╗ąĶį┌ų„│╠ą“ųąš{(di©żo)ė├PIDŽ“?q©▒)¦╔·│╔Ą─ūė│╠ą“Ż¼Š═┐╔ęį═Ļ│╔PID┐žųŲ╚╬äš(w©┤)ĪŻ
PIDŽ“?q©▒)¦╝╚┐╔ęį╔·│╔─ŻöM┴┐▌ö│÷PID┐žųŲ╦ŃĘ©Ż¼ę▓ų¦│ųķ_ĻP(gu©Īn)┴┐▌ö│÷Ż╗╝╚ų¦│ų▀B└m(x©┤)ūįäė(d©░ng)š{(di©żo)╣Ø(ji©”)Ż¼ę▓ų¦│ų╩ųäė(d©░ng)ģó┼c┐žųŲĪŻĮ©ūhė├æ¶╩╣ė├┤╦Ž“?q©▒)¦ī”PIDŠÄ│╠Ż¼ęį▒▄├Ō▓╗▒žę¬Ą─Õe(cu©░)š`ĪŻ
PIDŽ“?q©▒)¦ŠÄ│╠ĮMæB(t©żi)▓Į¾EŻ║1.į┌Micro/WIN SMARTųąĄ─╣żŠ▀▓╦å╬ųą▀xō±PIDŽ“?q©▒)¦Ż?BR>
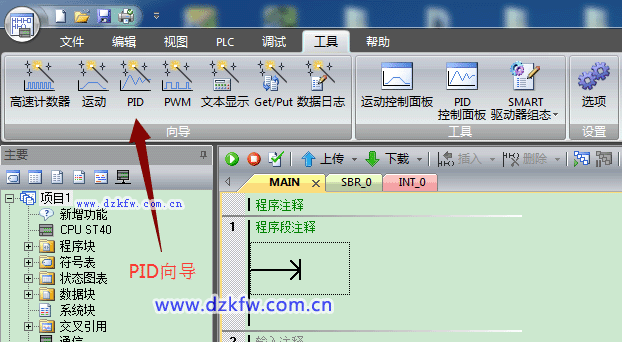
łD1. į┌╣żŠ▀Ö┌ųą▀xō±PIDŽ“?q©▒)?/P>

łD2.į┌ĒŚ(xi©żng)─┐śõųą┤“ķ_'Ž“?q©▒)?╬─╝■ŖAŻ¼╚╗║¾ļpō¶'PID'Ż¼╗“▀xō±'PID'▓ó░┤╗ž▄ćµIĪŻ
Č©┴xąĶę¬┼õų├Ą─PID╗ž┬Ę╠¢(h©żo)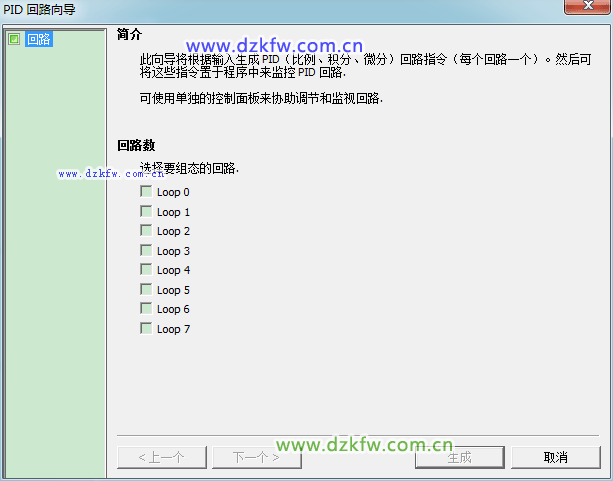
łD3.į┌┤╦ī”įÆ┐“ųą▀xō±ę¬ĮMæB(t©żi)Ą─╗ž┬Ę? 
łD4.ūŅČÓ┐╔ĮMæB(t©żi) 8 éĆ(g©©)╗ž┬ĘĪŻį┌┤╦ī”įÆ┐“╔Ž▀xō±╗ž┬ĘĢr(sh©¬)Ż¼PID Ž“?q©▒)¦ū¾é?c©©)Ą─śõęĢłDļSĮMæB(t©żi)įō╗ž┬Ę╦∙ąĶĄ─╦∙ėą╣Ø(ji©”)³c(di©Żn)ę╗ŲĖ³ą┬ĪŻ
2.×ķ╗ž┬ĘĮMæB(t©żi)├³├¹
łD5.┐╔×ķ╗ž┬ĘĮMæB(t©żi)ūįČ©┴x├¹ĘQĪŻ┤╦▓┐ĘųĄ──¼šJ(r©©n)├¹ĘQ╩Ū'╗ž┬Ę x'Ż¼Ųõųą'x'Ą╚ė┌╗ž┬ĘŠÄ╠¢(h©żo)
3.įO(sh©©)Č©PID╗ž┬ĘģóöĄ(sh©┤)
łD6.įO(sh©©)ų├PIDģóöĄ(sh©┤)ųąČ©┴x┴╦PID╗ž┬ĘģóöĄ(sh©┤)Ż¼▀@ą®ģóöĄ(sh©┤)Č╝æ¬(y©®ng)«ö(d©Īng)╩ŪīŹ(sh©¬)öĄ(sh©┤)Ż║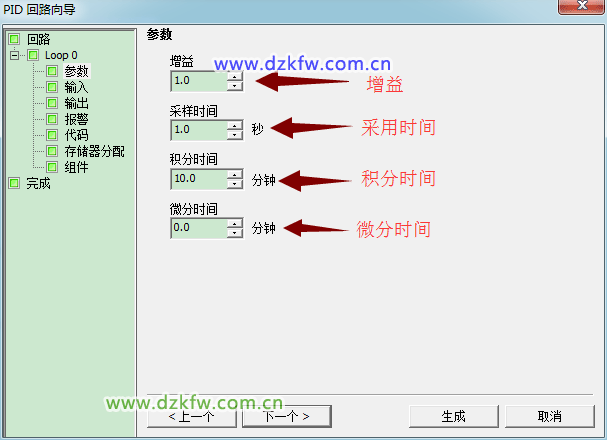
į÷굯║╝┤▒╚└²│ŻöĄ(sh©┤)Ż¼─¼šJ(r©©n)ųĄ=1.00ĪŻ
1ĘeĘųĢr(sh©¬)ķgŻ║╚ń╣¹▓╗Žļę¬ĘeĘųū„ė├┐╔ęįīóįōųĄįO(sh©©)ų├║▄┤¾Ż©▒╚╚ń10000.0Ż®Ż¼─¼šJ(r©©n)ųĄ=10.00ĪŻ
2╬óĘųĢr(sh©¬)ķgŻ║╚ń╣¹▓╗Žļę¬╬óĘų╗ž┬ĘŻ¼┐╔ęį░č╬óĘųĢr(sh©¬)ķgįO(sh©©)×ķ0 Ż¼─¼šJ(r©©n)ųĄ=0.00ĪŻ
3▓╔śėĢr(sh©¬)ķgŻ║╩ŪPID┐žųŲ╗ž┬Ęī”Ę┤ü▓╔śė║═ųžą┬ėŗ(j©¼)╦Ń▌ö│÷ųĄĄ─Ģr(sh©¬)ķgķgĖ¶,Ż¼─¼šJ(r©©n)ųĄ=1.00ĪŻį┌Ž“?q©▒)¦═Ļ│╔║¾Ż¼╚¶Žļꬹ▐Ė─┤╦ö?sh©┤)Ż¼ät▒žĒÜĘĄ╗žŽ“?q©▒)¦ųąą▐Ė─Ż¼▓╗┐╔į┌│╠ą“ųą╗“ĀŅæB(t©żi)▒Ēųąą▐Ė─ĪŻ
ūóęŌŻ║ĻP(gu©Īn)ė┌Š▀¾wĄ─PIDģóöĄ(sh©┤)ųĄŻ¼├┐ę╗éĆ(g©©)ĒŚ(xi©żng)─┐Č╝▓╗ę╗śėŻ¼ąĶę¬¼F(xi©żn)ł÷š{(di©żo)įćüĒČ©Ż¼ø]ėą╦∙ų^Įø(j©®ng)“×(y©żn)ģóöĄ(sh©┤)ĪŻ
4.įO(sh©©)Č©╗ž┬Ę▀^│╠ūā┴┐
łD7. įO(sh©©)Č©PID▌ö╚ļ▀^│╠ūā┴┐
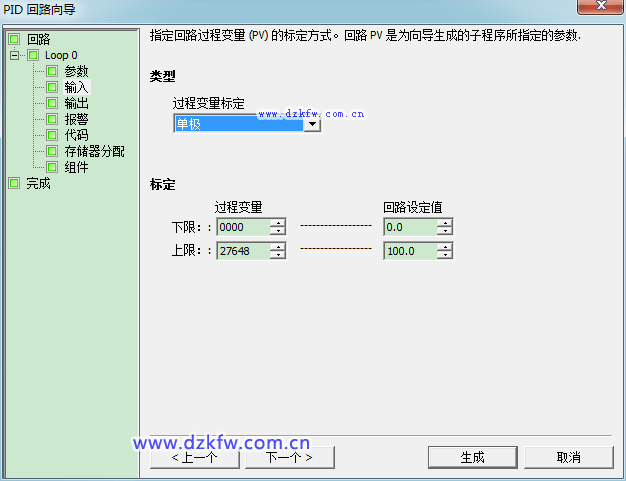
ųĖČ©╗ž┬Ę▀^│╠ūā┴┐ (PV) ╚ń║╬ś╦(bi©Īo)Č©ĪŻ┐╔ęįÅ─ęįŽ┬▀xĒŚ(xi©żng)ųą▀xō±Ż║1.å╬śOąį:╝┤▌ö╚ļĄ─ą┼╠¢(h©żo)×ķš²Ż¼╚ń0ŻŁ10V╗“0ŻŁ20mAĄ╚2.ļpśOąįŻ║▌ö╚ļą┼╠¢(h©żo)į┌Å─žō(f©┤)ĄĮš²Ą─ĘČć·ā╚(n©©i)ūā╗»ĪŻ╚ń▌ö╚ļą┼╠¢(h©żo)×ķĪ└10VĪóĪ└5VĄ╚Ģr(sh©¬)▀xė├3.▀xė├20%Ų½ęŲŻ║╚ń╣¹▌ö╚ļ×ķ4ŻŁ20mAät▀xå╬śOąį╝░┤╦ĒŚ(xi©żng)Ż¼4mA╩Ū0ŻŁ20mAą┼╠¢(h©żo)Ą─20%Ż¼╦∙ęį▀x20% Ų½ęŲŻ¼╝┤4mAī”æ¬(y©®ng)5530Ż¼20mAī”æ¬(y©®ng)27648ĪŻ4.£žČ╚ x 10 ĪŃC5£žČ╚ x 10 ĪŃF
Ę┤ü▌ö╚ļ╚ĪųĄĘČć·1į┌a.įO(sh©©)ų├×ķå╬śOĢr(sh©¬)Ż¼╚▒╩ĪųĄ×ķ0 - 27648Ż¼ī”æ¬(y©®ng)▌ö╚ļ┴┐│╠ĘČć·0 - 10V╗“0 - 20mAĄ╚Ż¼▌ö╚ļą┼╠¢(h©żo)×ķš²2į┌a.įO(sh©©)ų├×ķļpśOĢr(sh©¬)Ż¼╚▒╩ĪĄ─╚ĪųĄ×ķ-27648 - +27648Ż¼ī”æ¬(y©®ng)Ą─▌ö╚ļĘČć·Ė∙ō■(j©┤)┴┐│╠▓╗═¼┐╔ęį╩ŪĪ└10VĪóĪ└5VĄ╚3į┌a.▀xųą20% Ų½ęŲ┴┐Ģr(sh©¬)Ż¼╚ĪųĄĘČć·×ķ5530 - 27648Ż¼▓╗┐╔Ė─ūāį┌'ś╦(bi©Īo)Č©'(Scaling) ģóöĄ(sh©┤)ųąŻ¼ųĖČ©╗ž┬ĘįO(sh©©)Č©ųĄ (SP) ╚ń║╬ś╦(bi©Īo)Č©ĪŻ─¼šJ(r©©n)ųĄ╩Ū 0.0 ║═ 100.0 ų«ķgĄ─ę╗éĆ(g©©)īŹ(sh©¬)öĄ(sh©┤)ĪŻ┤╦Ę┤ü▌ö╚ļę▓┐╔ęį╩Ū╣ż│╠å╬╬╗öĄ(sh©┤)ųĄŻ¼ģóęŖŻ║įO(sh©©)ų├ĮoČ©ŻŁĘ┤üĄ─┴┐│╠ĘČć·ĪŻ
5.įO(sh©©)Č©▌ö╚ļ╗ž┬Ę▌ö│÷▀xĒŚ(xi©żng)
łD8. įO(sh©©)Č©PID▌ö│÷▀xĒŚ(xi©żng)

1▌ö│÷ŅÉą═┐╔ęį▀xō±─ŻöM┴┐▌ö│÷╗“öĄ(sh©┤)ūų┴┐▌ö│÷ĪŻ─ŻöM┴┐▌ö│÷ė├üĒ┐žųŲę╗ą®ąĶę¬─ŻöM┴┐ĮoČ©Ą─įO(sh©©)éõŻ¼╚ń▒╚└²ķyĪóūāŅlŲ„Ą╚Ż╗öĄ(sh©┤)ūų┴┐▌ö│÷īŹ(sh©¬)ļH╔Ž╩Ū┐žųŲ▌ö│÷³c(di©Żn)Ą─═©ĪóöÓĀŅæB(t©żi)░┤ššę╗Č©Ą─š╝┐š▒╚ūā╗»Ż¼┐╔ęį┐žųŲ╣╠æB(t©żi)└^ļŖŲ„Ż©╝ė¤ß░¶Ą╚Ż®
▀xō±─ŻöM┴┐ätąĶįO(sh©©)Č©╗ž┬Ę▌ö│÷ūā┴┐ųĄĄ─ĘČć·Ż¼┐╔ęį▀xō±Ż║1. å╬śOŻ║å╬śOąį▌ö│÷Ż¼┐╔×ķ0ŻŁ10V╗“0ŻŁ20mAĄ╚2. ļpśOŻ║ļpśOąį▌ö│÷Ż¼┐╔×ķš²žō(f©┤)10V╗“š²žō(f©┤)5VĄ╚3. å╬śO20% Ų½ęŲ┴┐Ż║╚ń╣¹▀xųą20% Ų½ęŲŻ¼╩╣▌ö│÷×ķ4 - 20mA4. ╚ĪųĄĘČć·Ż║0. c×ķå╬śOĢr(sh©¬)Ż¼╚▒╩ĪųĄ×ķ 0 ĄĮ 276480. c×ķļpśOĢr(sh©¬)Ż¼╚ĪųĄ-27648 ĄĮ276480. c×ķ20%Ų½ęŲ┴┐Ģr(sh©¬)Ż¼╚ĪųĄ5530 - 27648 Ż¼▓╗┐╔Ė─ūā?n©©i)ń╣¹▀xō±┴╦ķ_ĻP(gu©Īn)┴┐▌ö│÷Ż¼ąĶę¬įO(sh©©)Č©┤╦裣h(hu©ón)ų▄Ų┌
łD9. įO(sh©©)Č©PID▌ö│÷×ķöĄ(sh©┤)ūų┴┐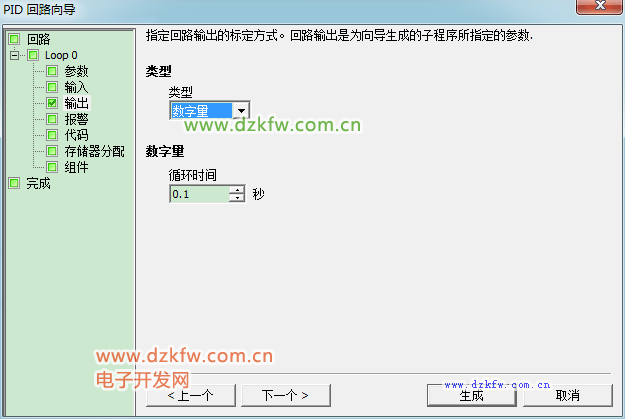
6.įO(sh©©)Č©╗ž┬Ęł¾(b©żo)Š»▀xĒŚ(xi©żng)
łD10. įO(sh©©)Č©╗ž┬Ęł¾(b©żo)Š»Ž▐Ę∙ųĄ

Ž“?q©▒)¦╠ß╣®┴╦╚²éĆ(g©©)▌ö│÷üĒĘ┤ė│▀^│╠ųĄ(PV)Ą─Ą═ųĄł¾(b©żo)Š»ĪóĖ▀ųĄł¾(b©żo)Š»╝░▀^│╠ųĄ─ŻöM┴┐─ŻēKÕe(cu©░)š`ĀŅæB(t©żi)ĪŻ«ö(d©Īng)ł¾(b©żo)Š»Śl╝■ØMūŃĢr(sh©¬)Ż¼▌ö│÷ų├╬╗×ķ1ĪŻ▀@ą®╣”─▄į┌▀xųą┴╦ŽÓæ¬(y©®ng)Ą─▀xō±┐“ų«║¾Ųū„ė├ĪŻ
1. ╩╣─▄Ą═ųĄł¾(b©żo)Š»▓óįO(sh©©)Č©▀^│╠ųĄ(PV)ł¾(b©żo)Š»Ą─Ą═ųĄŻ¼┤╦ųĄ×ķ▀^│╠ųĄĄ─░┘Ęų?j©½n)?sh©┤)Ż¼╚▒╩ĪųĄ×ķ0.10Ż¼╝┤ł¾(b©żo)Š»Ą─Ą═ųĄ×ķ▀^│╠ųĄĄ─10ŻźĪŻ┤╦ųĄūŅĄ═┐╔įO(sh©©)×ķ0.01Ż¼╝┤ØM┴┐│╠Ą─1%2. ╩╣─▄Ė▀ųĄł¾(b©żo)Š»▓óįO(sh©©)Č©▀^│╠ųĄ(PV)ł¾(b©żo)Š»Ą─Ė▀ųĄŻ¼┤╦ųĄ×ķ▀^│╠ųĄĄ─░┘Ęų?j©½n)?sh©┤)Ż¼╚▒╩ĪųĄ×ķ0.90Ż¼╝┤ł¾(b©żo)Š»Ą─Ė▀ųĄ×ķ▀^│╠ųĄĄ─90ŻźĪŻ┤╦ųĄūŅĖ▀┐╔įO(sh©©)×ķ1.00Ż¼╝┤ØM┴┐│╠Ą─100%3. ╩╣─▄▀^│╠ųĄ(PV)─ŻöM┴┐─ŻēKÕe(cu©░)š`ł¾(b©żo)Š»▓óįO(sh©©)Č©─ŻēKė┌CPU▀BĮėĢr(sh©¬)╦∙╠ÄĄ──ŻēK╬╗ų├ĪŻ'EM0'Š═╩ŪĄ┌ę╗éĆ(g©©)öU(ku©░)š╣─ŻēKĄ─╬╗ų├
7.Č©┴xŽ“?q©▒)¦╦∙╔·│╔Ą─PID│§╩╝╗»ūė│╠ą“║═ųąöÓ│╠ą“├¹╝░╩ų/ūįäė(d©░ng)─Ż╩Į
łD11. ųĖČ©ūė│╠ą“ĪóųąöÓĘ■äš(w©┤)│╠ą“├¹║═▀xō±╩ųäė(d©░ng)┐žųŲ

Ž“?q©▒)¦ęčĮ?j©®ng)×ķ│§╩╝╗»ūė│╠ą“║═ųąöÓūė│╠ą“Č©┴x┴╦╚▒╩Ī├¹Ż¼─Ńę▓┐╔ęįą▐Ė─│╔ūį╝║ŲĄ─├¹ūųĪŻ
1. ųĖČ©PID│§╩╝╗»ūė│╠ą“Ą─├¹ūųĪŻ
2. ųĖČ©PIDųąöÓūė│╠ą“Ą─├¹ūųūóęŌŻ║
1. ╚ń╣¹─ŃĄ─ĒŚ(xi©żng)─┐ųąęčĮø(j©®ng)┤µį┌ę╗éĆ(g©©)PID┼õų├Ż¼ätųąöÓ│╠ą“├¹×ķų╗ūxŻ¼▓╗┐╔Ė³Ė─ĪŻę“?y©żn)ķę╗éĆ(g©©)ĒŚ(xi©żng)─┐ųą╦∙ėąPID╣▓ė├ę╗éĆ(g©©)ųąöÓ│╠ą“Ż¼╦³Ą─├¹ūų▓╗Ģ■(hu©¼)▒╗╚╬║╬ą┬Ą─PID╦∙Ė³Ė─ĪŻ2. PIDŽ“?q©▒)¦ųąöÓė├Ą─╩ŪSMB34Č©Ģr(sh©¬)ųąöÓŻ¼į┌ė├æ¶╩╣ė├┴╦PIDŽ“?q©▒)¦║¾Ż¼ūóęŌį┌Ųõ╦³ŠÄ│╠Ģr(sh©¬)▓╗ę¬į┘ė├┤╦ųąöÓŻ¼ę▓▓╗ꬎ“SMB34ųąīæ╚ļą┬Ą─öĄ(sh©┤)ųĄŻ¼Ę±ätPIDīó═Żų╣╣żū„ĪŻ3. ┤╦╠Ä┐╔ęį▀xō±╠Ē╝ėPID ╩ųäė(d©░ng)┐žųŲ─Ż╩ĮĪŻį┌PID╩ųäė(d©░ng)┐žųŲ─Ż╩ĮŽ┬Ż¼╗ž┬Ę▌ö│÷ė╔╩ųäė(d©░ng)▌ö│÷įO(sh©©)Č©┐žųŲŻ¼┤╦Ģr(sh©¬)ąĶę¬īæ╚ļ╩ųäė(d©░ng)┐žųŲ▌ö│÷ģóöĄ(sh©┤)ę╗éĆ(g©©)0.0ŻŁ1.0Ą─īŹ(sh©¬)öĄ(sh©┤)Ż¼┤·▒Ē▌ö│÷Ą─0ŻźŻŁ100ŻźČ°▓╗╩Ūų▒Įė╚źĖ─ūā▌ö│÷ųĄĪŻPID┐žųŲĄ─ūįäė(d©░ng)/╩ųäė(d©░ng)ų«ķgĄ─¤oö_äė(d©░ng)ŪąōQ
8.ųĖČ©PID▀\(y©┤n)╦ŃöĄ(sh©┤)ō■(j©┤)┤µā”(ch©│)ģ^(q©▒)
łD12. Ęų┼õ▀\(y©┤n)╦ŃöĄ(sh©┤)ō■(j©┤)┤µā”(ch©│)ģ^(q©▒)
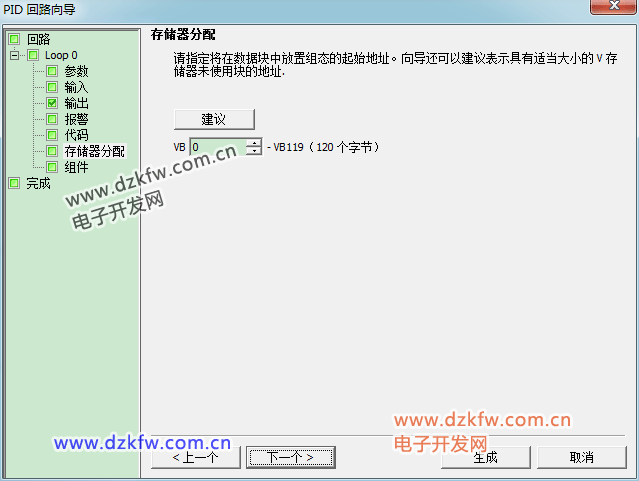
PIDųĖ┴ŅŻ©╣”─▄ēKŻ®╩╣ė├┴╦ę╗éĆ(g©©)120éĆ(g©©)ūų╣Ø(ji©”)Ą─Vģ^(q©▒)ģóöĄ(sh©┤)▒ĒüĒ▀M(j©¼n)ąą┐žųŲ╗ž┬ĘĄ─▀\(y©┤n)╦Ń╣żū„Ż╗│²┤╦ų«═ŌŻ¼PIDŽ“?q©▒)¦╔·│╔Ą─▌ö╚?▌ö│÷┴┐Ą─ś╦(bi©Īo)£╩(zh©│n)╗»│╠ą“ę▓ąĶę¬▀\(y©┤n)╦ŃöĄ(sh©┤)ō■(j©┤)┤µā”(ch©│)ģ^(q©▒)ĪŻąĶę¬×ķ╦³éāČ©┴xę╗éĆ(g©©)Ų╩╝ĄžųĘŻ¼ę¬▒ŻūCįōĄžųĘŲ╩╝Ą─╚¶Ė╔ūų╣Ø(ji©”)į┌│╠ą“Ą─Ųõ╦³ĄžĘĮ?j©®ng)]ėą▒╗ųžÅ═(f©┤)╩╣ė├ĪŻ╚ń╣¹³c(di©Żn)ō¶'Į©ūh'Ż¼ätŽ“?q©▒)¦īóūįä?d©░ng)×ķ─ŃįO(sh©©)Č©«ö(d©Īng)Ū░│╠ą“ųąø]ėąė├▀^Ą─Vģ^(q©▒)ĄžųĘĪŻ
ūįäė(d©░ng)Ęų┼õĄ─ĄžųĘų╗╩Ūį┌ł╠(zh©¬)ąąPIDŽ“?q©▒)¦Ģr(sh©¬)ŠÄūgÖz£yĄĮ┐šķeĄžųĘĪŻŽ“?q©▒)¦īóūįä?d©░ng)×ķįōģóöĄ(sh©┤)▒ĒĘų┼õĘ¹╠¢(h©żo)├¹Ż¼ė├æ¶▓╗ę¬į┘ūį╝║×ķ▀@ą®ģóöĄ(sh©┤)Ęų┼õĘ¹╠¢(h©żo)├¹Ż¼Ę±ätīóī¦(d©Żo)ų┬PID┐žųŲ▓╗ł╠(zh©¬)ąąĪŻ
9.╔·│╔PIDūė│╠ą“ĪóųąöÓ│╠ą“╝░Ę¹╠¢(h©żo)▒ĒĄ╚
ę╗Ą®³c(di©Żn)ō¶═Ļ│╔░┤ŌoŻ¼īóį┌─ŃĄ─ĒŚ(xi©żng)─┐ųą╔·│╔╔Ž╩÷PIDūė│╠ą“ĪóųąöÓ│╠ą“╝░Ę¹╠¢(h©żo)▒ĒĄ╚ĪŻ
łD13. ╔·│╔PIDūė│╠ą“ĪóųąöÓ│╠ą“║═Ę¹╠¢(h©żo)▒ĒĄ╚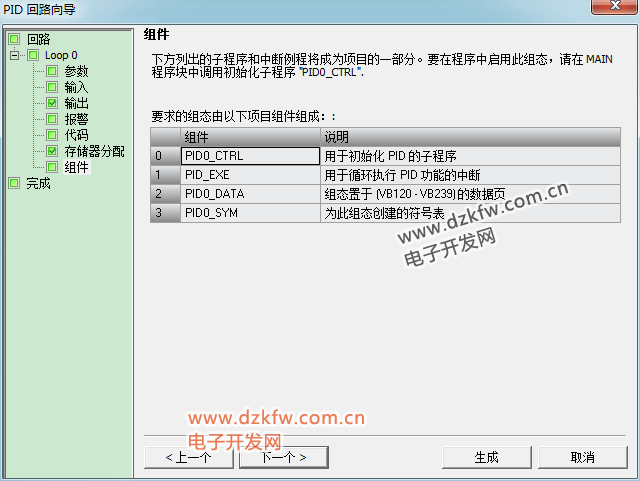
10.┼õų├═ĻP(gu©Īn)IDŽ“?q©▒)¦Ż¼ąĶę¬į┌│╠ą“ųąš{(di©żo)ė├Ž“?q©▒)¦╔·│╔Ą─PIDūė│╠ą“│╠
łD14. PIDūė│╠ą“
š{(di©żo)ė├PIDūė│╠ą“
į┌ė├æ¶│╠ą“ųąš{(di©żo)ė├PIDūė│╠ą“Ģr(sh©¬)Ż¼┐╔į┌ųĖ┴ŅśõĄ─│╠ą“ēKųąė├╩¾ś╦(bi©Īo)ļpō¶ė╔Ž“?q©▒)¦╔·│╔Ą─PIDūė│╠ą“Ż¼į┌Šų▓┐ūā┴┐▒ĒųąŻ¼┐╔ęį┐┤ĄĮėąĻP(gu©Īn)ą╬╩ĮģóöĄ(sh©┤)Ą─ĮŌßī║═╚ĪųĄĘČć·ĪŻ
1. ▒žĒÜė├SM0.0üĒ╩╣─▄ PIDx_CTRL ūė│╠ą“Ż¼SM0.0 ║¾▓╗─▄┤«┬ō(li©ón)╚╬║╬Ųõ╦¹Śl╝■Ż¼Č°Ūęę▓▓╗─▄ėąįĮ▀^╦³Ą─╠°▐D(zhu©Żn)Ż╗╚ń╣¹į┌ūė│╠ą“ųąš{(di©żo)ė├ PIDx_CTRL ūė│╠ą“Ż¼ätš{(di©żo)ė├╦³Ą─ūė│╠ą“ę▓▒žĒÜāH╩╣ė├ SM0.0 š{(di©żo)ė├Ż¼ęį▒ŻūC╦³Ą─š²│Ż▀\(y©┤n)ąą2. ┤╦╠Ä▌ö╚ļ▀^│╠ųĄŻ©Ę┤üŻ®Ą──ŻöM┴┐▌ö╚ļĄžųĘ3. ┤╦╠Ä▌ö╚ļįO(sh©©)Č©ųĄūā┴┐ĄžųĘŻ©VDxxŻ®Ż¼╗“š▀ų▒Įė▌ö╚ļįO(sh©©)Č©ųĄ│ŻöĄ(sh©┤)Ż¼Ė∙ō■(j©┤)Ž“?q©▒)¦ųąĄ─įO(sh©©)Č©0.0ŻŁ100.0Ż¼┤╦╠Äæ¬(y©®ng)▌ö╚ļę╗éĆ(g©©)0.0ŻŁ100.0Ą─īŹ(sh©¬)öĄ(sh©┤)Ż¼└²Ż║╚¶▌ö╚ļ20Ż¼╝┤×ķ▀^│╠ųĄĄ─20ŻźŻ¼╝┘įO(sh©©)▀^│╠ųĄA(ch©│)IW0╩Ū┴┐│╠×ķ0ŻŁ200Č╚Ą─£žČ╚ųĄŻ¼ät┤╦╠ÄĄ─įO(sh©©)Č©ųĄ20┤·▒Ē40Č╚Ż©╝┤200Č╚Ą─20ŻźŻ®Ż╗╚ń╣¹į┌Ž“?q©▒)¦ųąįO(sh©©)Č©ĮoČ©ĘČć·×ķ0.0 - 200.0Ż¼ät┤╦╠ÄĄ─20ŽÓ«ö(d©Īng)ė┌20Č╚
4. ┤╦╠Äė├I0.0┐žųŲPIDĄ─╩ų/ūįäė(d©░ng)ĘĮ╩ĮŻ¼«ö(d©Īng)I0.0×ķ1Ģr(sh©¬)Ż¼×ķūįäė(d©░ng)Ż¼Įø(j©®ng)▀^PID▀\(y©┤n)╦ŃÅ─AQW0▌ö│÷Ż╗«ö(d©Īng)I0.0×ķ0Ģr(sh©¬)Ż¼PIDīó═Żų╣ėŗ(j©¼)╦ŃŻ¼AQW0▌ö│÷×ķManualOutputŻ©VD4Ż®ųąĄ─įO(sh©©)Č©ųĄŻ¼┤╦Ģr(sh©¬)▓╗ę¬┴Ē═ŌŠÄ│╠╗“ų▒ĮėĮoAQW0┘xųĄĪŻ╚¶į┌Ž“?q©▒)¦ųąø]ėą▀xō±PID╩ųäė(d©░ng)╣”─▄Ż¼ät┤╦ĒŚ(xi©żng)▓╗Ģ■(hu©¼)│÷¼F(xi©żn)
5. Č©┴xPID╩ųäė(d©░ng)ĀŅæB(t©żi)Ž┬Ą─▌ö│÷Ż¼Å─AQW0▌ö│÷ę╗éĆ(g©©)ØMųĄĘČć·ā╚(n©©i)ī”æ¬(y©®ng)┤╦ųĄĄ─▌ö│÷┴┐ĪŻ┤╦╠Ä┐╔▌ö╚ļ╩ųäė(d©░ng)įO(sh©©)Č©ųĄĄ─ūā┴┐ĄžųĘŻ©VDxxŻ®Ż¼╗“ų▒Įė▌ö╚ļöĄ(sh©┤)ĪŻöĄ(sh©┤)ųĄĘČć·×ķ0.0-1.0ų«ķgĄ─ę╗éĆ(g©©)īŹ(sh©¬)öĄ(sh©┤)Ż¼┤·▒Ē▌ö│÷ĘČć·Ą─░┘Ęų▒╚ĪŻ└²Ż║╚ń▌ö╚ļ0.5Ż¼ätįO(sh©©)Č©×ķ▌ö│÷Ą─50ŻźĪŻ╚¶į┌Ž“?q©▒)¦ųąø]ėą▀xō±PID╩ųäė(d©░ng)╣”─▄Ż¼ät┤╦ĒŚ(xi©żng)▓╗Ģ■(hu©¼)│÷¼F(xi©żn)
6. ┤╦╠ĵI╚ļ┐žųŲ┴┐Ą─▌ö│÷ĄžųĘ7. «ö(d©Īng)Ė▀ł¾(b©żo)Š»Śl╝■ØMūŃĢr(sh©¬)Ż¼ŽÓæ¬(y©®ng)Ą─▌ö│÷ų├╬╗×ķ1Ż¼╚¶į┌Ž“?q©▒)¦ųąø]ėą╩╣─▄Ė▀ł¾(b©żo)Š»╣”─▄Ż¼ät┤╦ĒŚ(xi©żng)īó▓╗Ģ■(hu©¼)│÷¼F(xi©żn)8. «ö(d©Īng)?sh©┤)═ł?b©żo)Š»Śl╝■ØMūŃĢr(sh©¬)Ż¼ŽÓæ¬(y©®ng)Ą─▌ö│÷ų├╬╗×ķ1Ż¼╚¶į┌Ž“?q©▒)¦ųąø]ėą╩╣─▄Ą═ł¾(b©żo)Š»╣”─▄Ż¼ät┤╦ĒŚ(xi©żng)īó▓╗Ģ■(hu©¼)│÷¼F(xi©żn)9. «ö(d©Īng)─ŻēK│÷Õe(cu©░)Ģr(sh©¬)Ż¼ŽÓæ¬(y©®ng)Ą─▌ö│÷ų├╬╗×ķ1Ż¼╚¶į┌Ž“?q©▒)¦ųąø]ėą╩╣─▄─ŻēKÕe(cu©░)š`ł¾(b©żo)Š»╣”─▄Ż¼ät┤╦ĒŚ(xi©żng)īó▓╗Ģ■(hu©¼)│÷¼F(xi©żn)š{(di©żo)ė├PIDūė│╠ą“Ģr(sh©¬)Ż¼▓╗ė├┐╝æ]ųąöÓ│╠ą“ĪŻūė│╠ą“Ģ■(hu©¼)ūįäė(d©░ng)│§╩╝╗»ŽÓĻP(gu©Īn)Ą─Č©Ģr(sh©¬)ųąöÓ╠Ä└Ē╩┬ĒŚ(xi©żng)Ż¼╚╗║¾ųąöÓ│╠ą“Ģ■(hu©¼)ūįäė(d©░ng)ł╠(zh©¬)ąąĪŻ
11.īŹ(sh©¬)ļH▀\(y©┤n)ąą▓óš{(di©żo)įćPIDģóöĄ(sh©┤)
ø]ėąę╗éĆ(g©©)PIDĒŚ(xi©żng)─┐Ą─ģóöĄ(sh©┤)▓╗ąĶꬹ▐Ė─Č°─▄ų▒Įė▀\(y©┤n)ąąŻ¼ę“┤╦ąĶę¬į┌īŹ(sh©¬)ļH▀\(y©┤n)ąąĢr(sh©¬)š{(di©żo)įćPIDģóöĄ(sh©┤)ĪŻ
▓ķ┐┤öĄ(sh©┤)ō■(j©┤)ēKęį╝░Ę¹╠¢(h©żo)▒ĒŽÓæ¬(y©®ng)Ą─PIDĘ¹╠¢(h©żo)ś╦(bi©Īo)║ץ─ā╚(n©©i)╚▌Ż¼┐╔ęįšęĄĮ░³└©PID║╦ą─ųĖ┴Ņ╦∙ė├Ą─┐žųŲ╗ž┬Ę▒ĒŻ¼░³└©▒╚└²ŽĄöĄ(sh©┤)ĪóĘeĘųĢr(sh©¬)ķgĄ╚Ą╚ĪŻīó┤╦▒ĒĄ─ĄžųĘÅ═(f©┤)ųŲĄĮĀŅæB(t©żi)▒ĒųąŻ¼┐╔ęįį┌▒O(ji©Īn)┐ž─Ż╩ĮŽ┬į┌ŠĆą▐Ė─PIDģóöĄ(sh©┤)Ż¼Č°▓╗▒ž═ŻÖC(j©®)į┘┤╬ū÷┼õų├ĪŻ
ģóöĄ(sh©┤)š{(di©żo)įć║Ž▀m║¾Ż¼ė├æ¶┐╔ęįį┌öĄ(sh©┤)ō■(j©┤)ēKųąīæ╚ļŻ¼ę▓┐╔ęįį┘ū÷ę╗┤╬Ž“?q©▒)¦Ż¼╗“š▀ŠÄ│╠Ž“ŽÓæ?y©®ng)Ą─öĄ(sh©┤)ō■(j©┤)ģ^(q©▒)é„╦═ģóöĄ(sh©┤)ĪŻ
03PIDĮMæB(t©żi)įO(sh©©)ų├ųą│Żå¢å¢Ņ}
ū÷═ĻP(gu©Īn)IDŽ“?q©▒)¦║¾Ż¼╚ń║╬ų¬Ą└Ž“ī(q©▒)¦ųąįO(sh©©)Č©ųĄŻ¼▀^│╠ųĄ╝░PIDĄ╚ģóöĄ(sh©┤)╦∙ė├Ą─ĄžųĘŻ┐
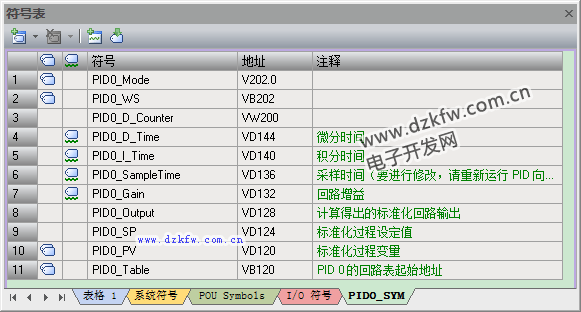
ū÷═ĻP(gu©Īn)IDŽ“?q©▒)¦║¾┐╔į┌Ę¹╠?h©żo)▒ĒųąŻ¼▓ķ┐┤PIDŽ“?q©▒)¦╦∙╔·│╔Ą─Ę¹╠?h©żo)▒Ē(╔Ž└²ųą×ķPID0_SYM)Ż¼┐╔┐┤ĄĮĖ„ģóöĄ(sh©┤)╦∙ė├Ą─įö╝Ü(x©¼)ĄžųĘŻ¼╝░öĄ(sh©┤)ųĄĘČć·ĪŻį┌öĄ(sh©┤)ō■(j©┤)ēKųąŻ¼▓ķ┐┤PIDųĖ┴Ņ╗ž┬Ę▒ĒĄ─ŽÓĻP(gu©Īn)ģóöĄ(sh©┤)ĪŻ╚ńłD╦∙╩ŠŻ║
1. ū÷═ĻP(gu©Īn)IDŽ“?q©▒)¦║¾Ż¼╚ń║╬į┌š{(di©żo)įćųąą▐Ė─PIDģóöĄ(sh©┤)Ż┐┤Ż║┐╔ęįį┌ĀŅæB(t©żi)▒ĒųąŻ¼▌ö╚ļŽÓæ¬(y©®ng)Ą─ģóöĄ(sh©┤)ĄžųĘŻ¼╚╗║¾į┌ŠĆīæ╚ļė├æ¶ąĶꬥ─PIDģóöĄ(sh©┤)öĄ(sh©┤)ųĄŻ¼▀@śėė├涊═┐╔Ė∙ō■(j©┤)╣ż╦ćąĶę¬ļSĢr(sh©¬)ī”PIDģóöĄ(sh©┤)ĪóįO(sh©©)Č©ųĄĄ╚▀M(j©¼n)ąąš{(di©żo)š¹ĪŻ
2.PIDęčĮø(j©®ng)š{(di©żo)š¹║Ž▀mŻ¼╚ń║╬š²╩Į┤_Č©ģóöĄ(sh©┤)Ż┐┤Ż║┐╔ęįį┌öĄ(sh©┤)ō■(j©┤)ēKųąų▒Įėīæ╚ļ?y©▓n)óö?sh©┤)ĪŻ
3.ū÷═ĻP(gu©Īn)IDŽ“?q©▒)¦║¾Ż¼─▄ʱ▓ķ┐┤PID╔·│╔Ą─ūė│╠ą“Ż¼ųąöÓ│╠ą“Ż┐ ┤Ż║PIDŽ“?q©▒)¦╔·│╔Ą─ūė│╠ą“Ż¼ųąöÓ│╠ą“ė├æ¶╩Ū¤oĘ©┐┤ĄĮĄ─Ż¼ę▓▓╗─▄ī”Ųõ▀M(j©¼n)ąąą▐Ė─ĪŻø]ėą├▄┤a─▄ē“┤“ķ_▀@ą®ūė│╠ą“Ż¼ę╗░ŃĄ─æ¬(y©®ng)ė├ę▓ø]ėą▒žę¬┤“ķ_▓ķ┐┤ĪŻ
4.PIDģóöĄ(sh©┤)ėąĮø(j©®ng)“×(y©żn)ųĄå߯┐ ┤Ż║├┐ę╗éĆ(g©©)ĒŚ(xi©żng)─┐Ą─PID ģóöĄ(sh©┤)Č╝▓╗ę╗śėŻ¼ø]ėąĮø(j©®ng)“×(y©żn)ģóöĄ(sh©┤)Ż¼ų╗─▄¼F(xi©żn)ł÷š{(di©żo)įć½@Ą├ĪŻ
5.╬ęĄ─PIDŽ“?q©▒)¦╔·│╔Ą─│╠ą“×(y©żn)ķ║╬▓╗ł?zh©¬)ąąŻ┐┤Ż║▒žĒÜ▒ŻūCė├SM0.0¤oŚl╝■š{(di©żo)ė├PID0_CTRL│╠ą“į┌│╠ą“Ą─Ųõ╦³▓┐Ęų▓╗ę¬į┘╩╣ė├SMB34Č©Ģr(sh©¬)ųąöÓŻ¼ę▓▓╗ę¬ī”SMB34┘xųĄ
6.╚ń║╬īŹ(sh©¬)¼F(xi©żn)PIDĘ┤ū„ė├š{(di©żo)╣Ø(ji©”)Ż┐┤Ż║į┌ėąą®┐žųŲųąąĶę¬PIDĘ┤ū„ė├š{(di©żo)╣Ø(ji©”)ĪŻ└²╚ńŻ║į┌Ž─╠ņ┐žųŲ┐šš{(di©żo)ųŲ└õĢr(sh©¬)Ż¼╚¶Ę┤ü£žČ╚Ż©▀^│╠ųĄŻ®Ą═ė┌įO(sh©©)Č©£žČ╚Ż¼ąĶę¬ĻP(gu©Īn)ķyŻ¼£pąĪ▌ö│÷┐žųŲŻ©£p╔┘└õ╦«┴„┴┐Ą╚Ż®Ż¼▀@Š═╩ŪPIDĘ┤ū„ė├š{(di©żo)╣Ø(ji©”)Ż©į┌PIDš²ū„ė├ųą╚¶▀^│╠ųĄąĪė┌įO(sh©©)Č©ųĄŻ¼ätąĶę¬į÷┤¾▌ö│÷┐žųŲŻ®ĪŻ╚¶ŽļīŹ(sh©¬)¼F(xi©żn)PIDĘ┤ū„ė├š{(di©żo)╣Ø(ji©”)Ż¼ąĶę¬░čPID╗ž┬ĘĄ─į÷ęµįO(sh©©)×ķžō(f©┤)öĄ(sh©┤)ĪŻī”ė┌į÷ęµ×ķ0Ą─ĘeĘų╗“╬óĘų┐žųŲüĒšfŻ¼╚ń╣¹ųĖČ©ĘeĘųĢr(sh©¬)ķgĪó╬óĘųĢr(sh©¬)ķg×ķžō(f©┤)ųĄŻ¼ät╩ŪĘ┤ū„ė├╗ž┬ĘĪŻ
7.╚ń║╬Ė∙ō■(j©┤)╣ż╦ćę¬Ū¾ėą▀xō±Ąž═Č╚ļPID╣”─▄Ż┐┤Ż║┐╔╩╣ė├'╩ųäė(d©░ng)/ūįäė(d©░ng)'ŪąōQĄ─╣”─▄ĪŻPIDŽ“?q©▒)¦╔·│╔Ą─PID╣”─▄ēKų╗─▄╩╣ė├SM0.0Ą─Śl╝■š{(di©żo)ė├ĪŻ
RECOMMEND
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū