
╬„ķTūėS7-200 SMART AXIS_GOTO ėą4ĘN─Ż╩Į
ModeģóöĄ▀xō±ęŲäėĄ─ŅÉą═Ż║
0Ż║Į^ī”╬╗ų├Ż╗
1Ż║ŽÓī”╬╗ų├Ż╗
2Ż║å╬╦┘▀B└mš²Ž“ą²▐DŻ╗
3Ż║å╬╦┘▀B└mĘ┤Ž“ą²▐DŻ╗
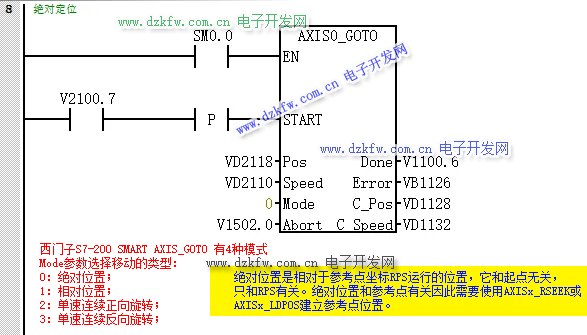
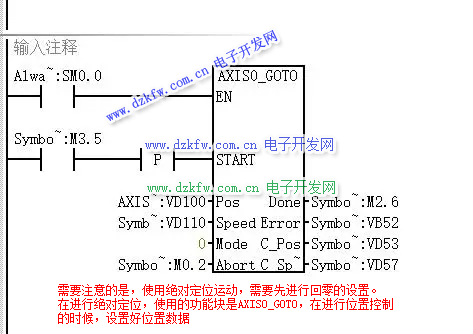
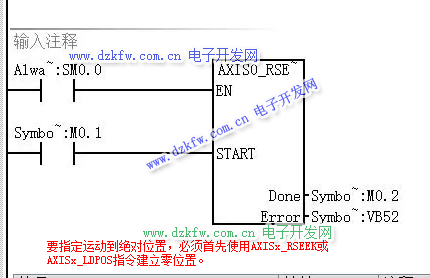
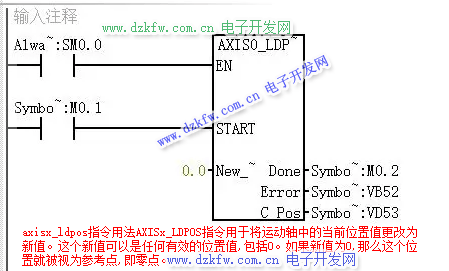
2.Į^ī”╬╗ų├╩ŪŽÓī”ė┌ģó┐╝³cū°ś╦RPS▀\ąąĄ─╬╗ų├Ż¼╦³║═Ų³c¤oĻPŻ¼ų╗║═RPSėąĻPĪŻĮ^ī”╬╗ų├║═ģó┐╝³cėąĻPę“┤╦ąĶę¬╩╣ė├AXISx_RSEEK╗“AXISx_LDPOSĮ©┴óģó┐╝³c╬╗ų├ĪŻ
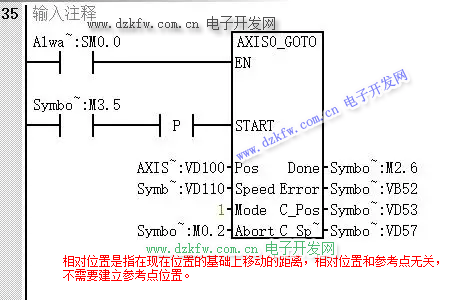
å╬╦┘▀B└mš²Ž“ą²▐D║═å╬╦┘▀B└mĘ┤Ž“ą²▐D║═ŽÓī”╬╗ų├ŅÉ╦ŲŻ¼║▄║├īŹ¼FŻ¼▀@└’╬ęŠ═▓╗ę╗ę╗┘ś╩÷┴╦ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū