
į┌╣żśI┐žųŲųąŻ¼│²┴╦öĄūųą┼╠¢ęį═ŌŻ¼▀ĆąĶę¬ī”ļŖ┴„ĪóļŖē║Ą╚ļŖ┴┐║═£žČ╚Īó┴„┴┐Īóē║┴”Ą╚▀^│╠ūā┴┐▀MąąÖz£y║═┐žųŲĪŻį┌ūįäė┐žųŲŽĄĮyųąŻ¼ę¬░č▀@ą®ą┼╠¢▐DōQ×ķś╦£╩ęÄĖ±Ą─ļŖą┼╠¢Ż¼į┘īóŲõ▐DōQ×ķėŗ╦ŃÖC┐╔ęįĮė╩▄Ą─öĄūųą┼╠¢Ż╗Č°┴Ēę╗ĘĮ├µėų░čėŗ╦ŃÖC«a╔·Ą─öĄūų┐žųŲą┼╠¢▐DōQ×ķ─ŻöMą┼╠¢▌ö│÷ĄĮ┐žųŲ¼Fł÷Ż¼╚ź┐žųŲ▒╗┐ž┴┐Ą─ūā╗»ĪŻ
═©│ŻŻ¼░čÅ─¼Fł÷ą┼╠¢ĄĮCPUų«ķgĄ─Ė„éĆŁh╣ØĘQ×ķ▀^│╠═©Ą└Ż¼╦³╩Ūėŗ╦ŃÖC┐žųŲŽĄĮyųąĄ─ųžę¬ĮM│╔▓┐ĘųŻ¼ė├ė┌īŹ¼Fą┼╠¢Ą─ūāōQĪóé„▀f┼c▐DōQĄ╚╣”─▄ĪŻPLC┤¾Č╝ōĒėąīŹ¼F▀^│╠═©Ą└ū„ė├Ą─╠ž╩Ō╣”─▄å╬į¬Ż¼╝┤─ŻöM┴┐ą┼╠¢Ą─▌ö╚ļŻ»▌ö│÷å╬į¬Ż¼ė├ė┌─ŻöM┴┐ą┼╠¢Öz£y┼c┐žųŲ╣”─▄Ą─īŹ¼FĪŻ
Ž┬├µęįā╔┼_╚²ŽÓ«É▓ĮļŖäėÖC═ŽäėĄ─Ī░▌ö╦═ŠĆļpÖC═¼▓Į┐žųŲĪ▒×ķ└²Ż¼šf├„PLC─ŻöM┴┐ą┼╠¢Ą─▌ö╚ļĪó▀\╦Ń╝░┐žųŲą┼╠¢▌ö│÷Ą─╗∙▒ŠĘĮĘ©ĪŻ
8.3.1 ┐žųŲę¬Ū¾Īó╣ż╦ć▀^│╠Īó┐žųŲįŁ└ĒĘų╬÷
į┌ūįäė╗»╔·«aŠĆįOėŗųąŻ¼Įø│ŻĢ■ė÷ĄĮå╬Śl▌ö╦═ŠĆķLČ╚▀^ķL╗“░³ĮŪ▀^┤¾Ą─å¢Ņ}Ż¼┤╦ĢrŠ═ę¬įOų├ā╔éĆ“īäėčbų├Ż¼Č°į┌┐žųŲ╔ŽŠ═ąĶ╩╣ā╔┼_“īäėčbų├═¼▓Į▀\ąąŻ¼╚ńłD8-9╦∙╩ŠĪŻ═¼▓ĮĄ─ĘĮĘ©║▄ČÓŻ¼▒╚╚ńÅłŠoÖz£yĘĮ╩ĮĪó▐DŠžÖz£yĘĮ╩ĮĪóą²▐DŠÄ┤aŲ„Öz£yĘĮ╩ĮĄ╚Ż¼╦³éāĖ„ėą▀mė├ĘČć·║═ā×╚▒³cĪŻ
▐DŠžÖz£yĘĮ╩Į═©▀^Öz£yā╔┼_“īäėļŖäėÖCĄ─▐DŠžŻ¼┐žųŲūāŅlŲ„Ą─▌ö│÷Ņl┬╩Ż¼īŹ¼F▌ö╦═ŠĆĄ─▐DŠžķ]ŁhļpÖC═¼▓Į┐žųŲĪŻ└²╚ńŻ¼ęį“īäė1×ķ╗∙£╩Ż¼╚¶“īäė2▐DŠž┤¾ė┌“īäė1▐DŠžät“īäė2£p╦┘Ż¼“īäė2▐DŠžąĪė┌“īäėl▐DŠžät“īäė2╝ė╦┘ĪŻįŁ└Ē║åå╬Ż¼┐žųŲę▓▌^╚▌ęūĪŻ
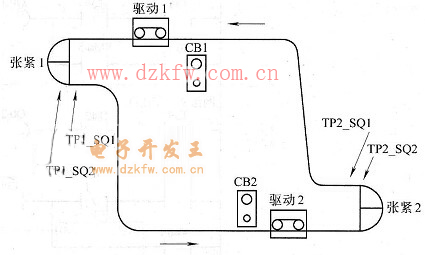
łD8-9 ▌ö╦═ŠĆļpÖC═¼▓Į▀\ąą╣ż╦ćłD
╦┘Č╚įOČ©▓╔ė├ā╔╬╗ō▄┤aķ_ĻP▌ö╚ļĮoPLCĄ─öĄūų┴┐▌ö╚ļ─ŻēKŻ¼╗“▓╔ė├ļŖ╬╗Ų„▌ö╚ļĮo─ŻöM┴┐▌ö╚ļ─ŻēKŻ¼įOČ©ĘČć·5~ 48HzĪŻę“▓╔ė├ūāŅlŲ„š{╦┘Ż¼Č°ūāŅlŲ„▒Š╔ĒĄ──ŻöM┴┐▌ö│÷┐╔ė├ė┌’@╩Š╗“▒O£yŅl┬╩ĪóļŖ┴„Īó▐DŠžĄ╚ģóöĄŻ¼ę“┤╦Ż¼ūāŅlŲ„Ą──ŻöM┴┐▌ö│÷┐╔ų▒Įė▌ö╚ļĄĮPLCĄ──ŻöM┴┐▌ö╚ļ─ŻēKüĒÖz£y▐DŠžųĄĪŻā╔▐DŠžųĄĮøPLC▀\╦Ń║¾Ż¼═©▀^PLC─ŻöM┴┐▌ö│÷─ŻēK╚źįOČ©ūāŅlŲ„Ą─īŹļH▀\ąąŅl┬╩Ż¼Å─Č°▀_ĄĮļpÖC═¼▓ĮĄ──┐Ą─ĪŻ
×ķ╩╣▌ö╦═ŠĆ▀\ąąĖ³░▓╚½Īó┐╔┐┐Ż¼į┌▌ö╦═ŠĆÅłŠo╠Ä╝ėčbÅłŠoŽ▐╬╗▒Żūoķ_ĻPŻ¼īŹ¼FÅłŠoĄ─ūįäė▒ŻūoŻ¼╚ńłD8-9ųąĄ─TP_SQŻ╗į┌▌ö╦═ŠĆ▀m«ö▓┐╬╗░▓čb╝▒═Ż░┤ŌoŻ¼═Ļ│╔¼Fł÷Ą─Šo╝▒═Ż▄ćŻ¼╚ńłD8-9ųąĄ─CB1║═CB2ĪŻ
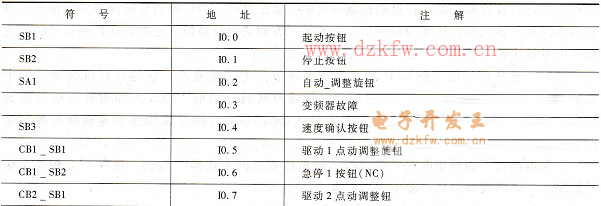
8.3.2 PLC▀xą═║═┘Yį┤┼õų├
ė╔╔Ž├µĄ─Ęų╬÷┐╔ų¬Ż¼│²ę╗░ŃöĄūų┴┐I/O═ŌŻ¼▐DŠžĄ─Öz£yąĶ─ŻöM┴┐▌ö╚ļ─ŻēKŻ¼Č°ūāŅlŲ„īŹļH▀\ąą╦┘Č╚Ą─š{╣ØąĶ─ŻöM┴┐▌ö│÷─ŻēKĪŻĖ∙ō■I/O³cŅÉą═║═öĄ┴┐Ż¼▓ķķåPLC╩ųāįŻ¼▀xō±Ž┬├µĄ─CPU╝░I/O─ŻēKŻ¼I/OĘų┼õ╚ń▒Ē8-3╦∙╩ŠĪŻ
▒Ē8-3 I/OĄžųĘĘų┼õ▒Ē
1) CPU(6ES7 214-1BD23-0XB0)Ż║ė├ė┌Ų═ŻĪó▒Żūo╝░▀\ąąą┼╠¢Ą╚ĪŻ
2)öĄūų▌ö╚ļ─ŻēK(6ES7 221-1BF22-0XA0)Ż║ō▄┤aķ_ĻPįOČ©╦∙ąĶŅl┬╩ĪŻ
3)─ŻöM▌ö╚ļ─ŻēKŻ©6ES7 231-0HC22-0XA0Ż®Ż║Öz£yūāŅlŲ„▌ö│÷▐DŠžĪŻ
4)─ŻöM▌ö│÷─ŻēK(6ES7 232-0HB22-0XA0)Ż║▌ö│÷ūāŅlŲ„Ņl┬╩ĮoČ©ųĄĪŻ
8.3.3 ┐žųŲ│╠ą“šf├„
│╠ą“▀\ąą▓Į¾E╚ńŽ┬Ż║
ó┘│§╩╝╗»Ż¼į┌│╠ą“Ą─Ą┌ę╗éĆÆ▀├Ķų▄Ų┌(SM0.1=1)įOų├│§╩╝╗»ģóöĄŻ╗
ó┌╠Ä└ĒĮoČ©Ņl┬╩Ż╗
ó█▓╔śė╠Ä└ĒŻ¼ī”▌ö╚ļą┼╠¢Ū¾ŲĮŠ∙ųĄŻ¼▓óŪęī”ā╔“īäė▒Š╔Ē╠žąįĄ─▓╗ę╗ų┬ąį▀MąąčaāöŻ╗
ó▄╦┘Č╚š{š¹Ż╗
ó▌▒Żūo╝░▀\ąą│╠ą“Ż©┬įŻ®ĪŻ
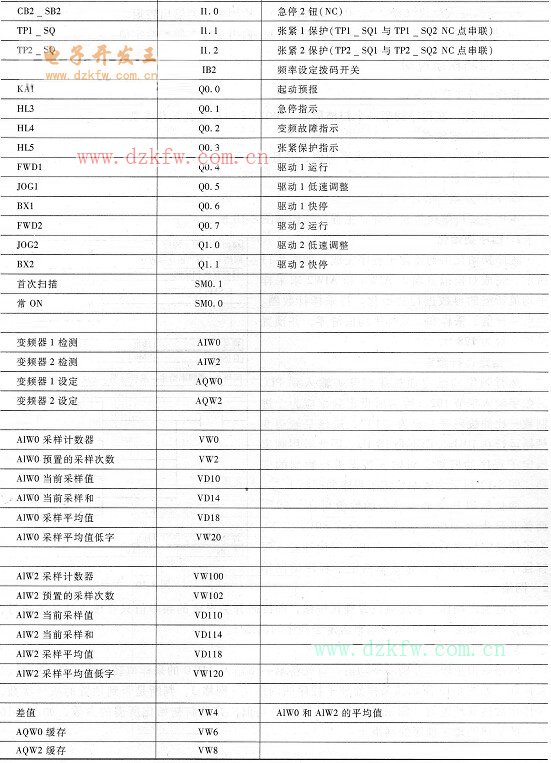
▒Š└²ų„ę¬ųvĮŌ─ŻöM┴┐╠Ä└ĒŻ¼ų„│╠ą“ĮYśŗ╚ńłD8 -10╦∙╩ŠĪŻ
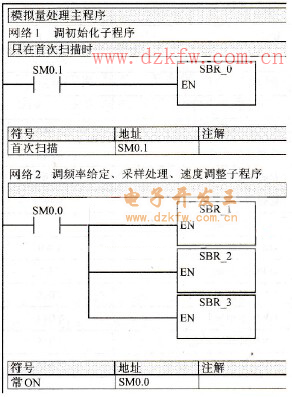
łD8-10 ų„│╠ą“
1Ż«│╠ą“│§╩╝╗»
│╠ą“│§╩╝╗»ė╔│§╩╝╗»ūė│╠ą“═Ļ│╔Ż¼╚ńłD8 -11╦∙╩ŠĪŻ═Ļ│╔ī”─ŻöM┴┐▌ö╚ļAIW0║═AIW2Ū¾▓╔śėŲĮŠ∙ųĄ╦∙ąĶĄ─ģóöĄ▀Mąą│§╩╝╗»ĪŻīó▓╔śėėŗöĄŲ„Īó«öŪ░▓╔śėųĄĪó▓╔śė║═Īó▓╔śėŲĮŠ∙ųĄŪÕ┴ŃŻ¼▓óŅAų├▓╔śė┤╬öĄ×ķ128┤╬ĪŻ
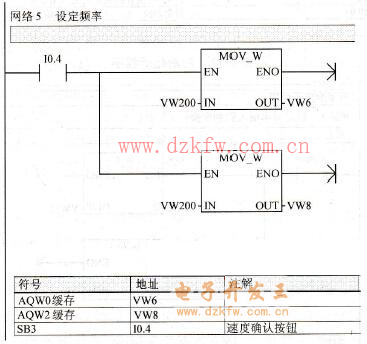
2Ż«ĮoČ©▀\ąąŅl┬╩
▀\ąąŅl┬╩Ą─ĮoČ©═©▀^ō▄┤aķ_ĻP▌ö╚ļĄĮPLCĄ─öĄūų▌ö╚ļūų╣ØIB2ĪŻę“×ķ╦∙įOČ©Ņl┬╩æ¬×ķ╩«▀MųŲöĄĪŻ▒╚╚ńō▄┤aķ_ĻPįO×ķĪ░10Ī▒Ż¼æ¬įō╩ŪŽŻ═¹ūāŅlŲ„▀\ąąį┌10HzŻ¼Č°▓╗╩Ū16 HzĪŻę“┤╦▓╔ė├Ņl┬╩ĮoČ©ūė│╠ą“Ą─ŠWĮj1ī”▌ö╚ļöĄō■▀MąąöĄųŲĄ─ūāōQĪŻłD8 -12╦∙╩Š×ķŅl┬╩ĮoČ©ūė│╠ą“Ą─ŠWĮj1ĪŻ
ā╔╬╗ō▄┤aķ_ĻPūŅ┤¾įOČ©Ą─öĄųĄ┐╔▀_Ī░99Ī▒Ż¼Č°Ųš═©«É▓ĮļŖäėÖCę╗░ŃįOėŗ▀\ąąį┌50HzęįŽ┬Ż¼×ķ┴╦╩╣įOČ©Ņl┬╩ųĄį┌50 Hzęįā╚Ż¼ąĶįOėŗ▌ö╚ļŽ▐Ę∙│╠ą“Ż¼łD8 -13╦∙╩Š×ķŅl┬╩ĮoČ©ūė│╠ą“Ą─ŠWĮj2Ī½ŠWĮj4ĪŻ
×ķ▒▄├Ōš`▓┘ū„Ż¼ŽĄĮyæ¬įOų├┤_šJ░┤ŌoŻ¼╝┤ō▄┤aķ_ĻPįOČ©Ą─Ņl┬╩ųĄų╗ėą░┤Ž┬┤_šJ░┤Ōo║¾Ż¼▓┼Ųū„ė├ĪŻ╚ńłD8 -14╦∙╩Š×ķŅl┬╩ĮoČ©ūė│╠ą“Ą─ŠWĮj5ĪŻ
3Ż«▓╔śėųĄ╠Ä└Ē
ā╔┬Ę─ŻöM┴┐▌ö╚ļĘųäeŪ¾ŲĮŠ∙ųĄŻ¼╩ūŽ╚īóĄ┌ę╗┬Ę▌ö╚ļAIW0Ą─▓╔śėųĄ▐DōQ×ķļpūųŻ¼╚╗║¾Ū¾▓╔śė║═Ż¼╚ńłD8 -15╦∙╩ŠĄ─▓╔śė╠Ä└Ēūė│╠ą“Ą─ŠWĮj1~ŠWĮj3ĪŻ┼ąöÓ╩ŪʱĄĮŅAų├Ą─▓╔śė┤╬öĄŻ¼▓╔śė┤╬öĄ▀_ĄĮŅAų├ųĄŻ¼ät▓╔ė├ęŲ╬╗Ą─ĘĮĘ©Ū¾ŲĮŠ∙ųĄŻ¼▓óųžą┬│§╩╝╗»╦∙ąĶĄ─ģóöĄŻ¼╚ńłD8 -16╦∙╩ŠĄ─▓╔śė╠Ä└Ēūė│╠ą“Ą─ŠWĮj4ĪŻ
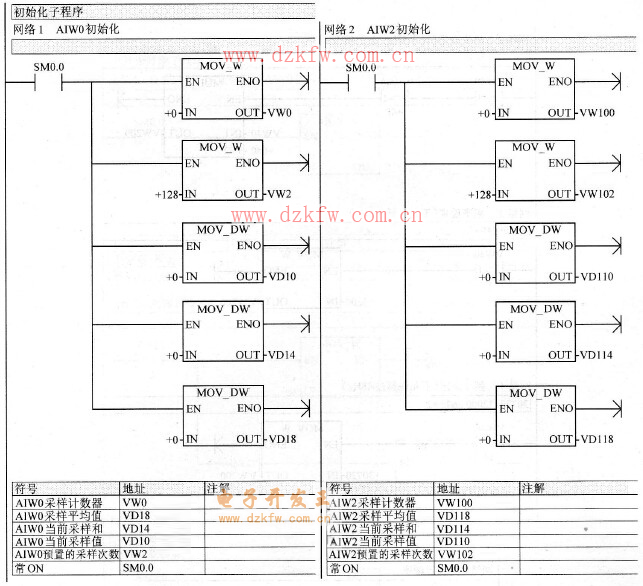
łD8-11 │§╩╝╗»ūė│╠ą“
łD8-12 öĄųŲūāōQ│╠ą“

łD8-13 ▌ö╚ļŽ▐Ę∙│╠ą“
łD8-14 ▌ö╚ļ┤_šJ│╠ą“
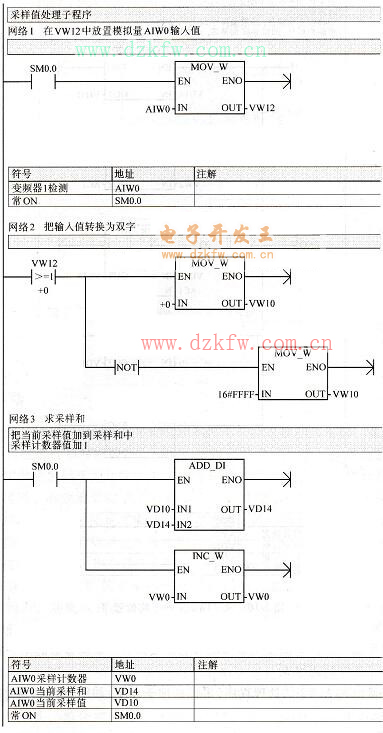
łD8-15 AIW0▐DōQļpūų╝░▓╔śėųĄŪ¾║═│╠ą“
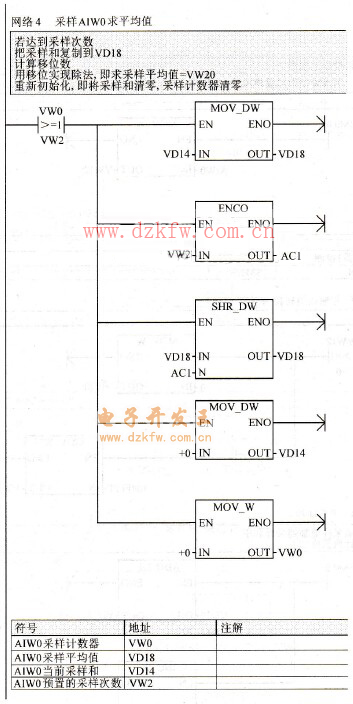
łD8-16 Ū¾AIW0▓╔śėŲĮŠ∙ųĄ│╠ą“
į┌S7-200 PLC╔Ž╝»│╔Ą──ŻöMš{╣ØļŖ╬╗Ų„į┌─ŻöM┴┐╠Ä└Ēųą┐╔ņ`╗Ņæ¬ė├Ż¼▒╚╚ń┐╔ū„×ķ▓╔śė┤╬öĄŅAų├ųĄĪóą┼╠¢š{╣ØĄ╚Ż¼▒Š└²╩╣ė├─ŻöMš{╣ØļŖ╬╗Ų„š{╣Øā╔“īäėģóöĄĄ─▓╗ę╗ų┬ąįĪŻ╚ńłD8 -17╦∙╩ŠĄ─▓╔śė╠Ä└Ēūė│╠ą“Ą─ŠWĮj5ĪŻ
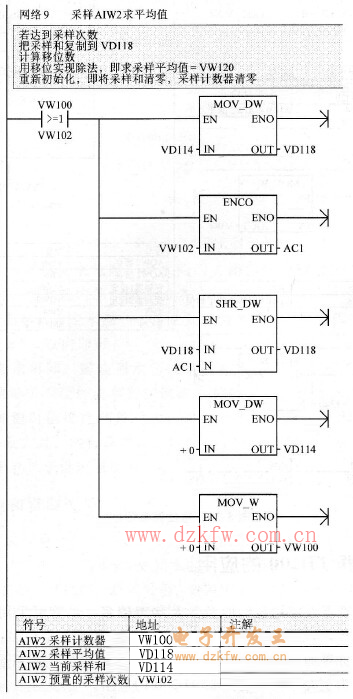
┴Ēę╗┬Ę─ŻöM┴┐▌ö╚ļAIW2Ą─╠Ä└Ē│╠ą“Ż©▓╔śė╠Ä└Ēūė│╠ą“Ż®╚ńłD8-18Ą─ŠWĮj6Ī½ŠWĮj8║═łD8 -19Ą─ŠWĮj9╦∙╩ŠĪŻ
4Ż«╦┘Č╚š{š¹
▒╚▌^ā╔“īäė▌ö│÷▐DŠžĄ─ŲĮŠ∙ųĄŻ¼Ž▐Ę∙║¾Ż¼Įø─ŻöM┴┐▌ö│÷─ŻēK▌ö│÷ĮoūāŅlŲ„Ż¼īŹ¼Fā╔“īäė╦┘Č╚Ą─š{š¹ĪŻ╦┘Č╚š{š¹ūė│╠ą“╚ńłD8-20ųąĄ─ŠWĮj1~ŠWĮj4╦∙╩ŠĪŻ
łD8-17 “īäėģóöĄš{š¹│╠ą“
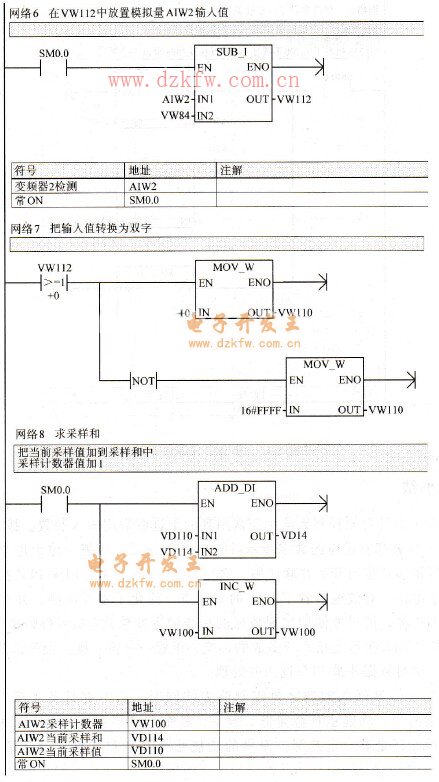
łD8-18 AIW2▐DōQļpūų╝░▓╔śėųĄŪ¾║═│╠ą“
łD8-19 AIW2▓╔śėŪ¾ŲĮŠ∙ųĄ│╠ą“
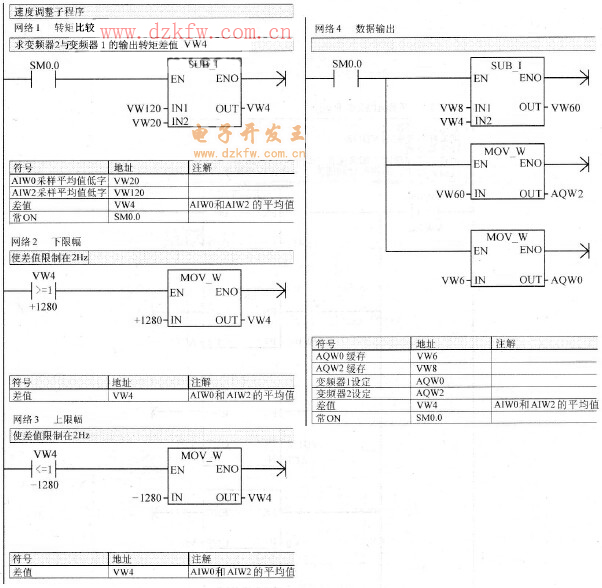
łD8-20 ╦┘Č╚š{š¹│╠ą“
8.3.4 įOėŗąĪĮY
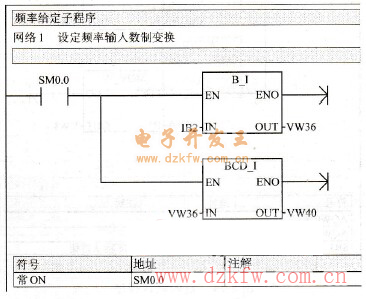
BCDō▄┤aķ_ĻP╩Ūėŗ╦ŃÖC┐žųŲŽĄĮyųąĮø│Żė├ĄĮĄ─╩«▀MųŲöĄō■▌ö╚ļčbų├ĪŻō▄▒P╣▓ėą0Ī½9╣▓10éĆ╬╗ų├Ż¼├┐ę╗╬╗ų├Č╝ėąŽÓæ¬Ą─öĄūųųĖ╩ŠŻ¼ę╗éĆō▄┤aķ_ĻP┐╔┤·▒Ēę╗╬╗╩«▀MųŲöĄō■Ż¼╚¶ąĶ▌ö╚ļČÓ╬╗öĄō■Ż¼┐╔ė├ČÓŲ¼ō▄┤aķ_ĻP▓ó┬ō╩╣ė├ĪŻ▀xė├BCDō▄┤aķ_ĻPæ¬ė├ė┌PLC┐žųŲŽĄĮyŻ¼¤oąĶį┘įOėŗöĄ┤a’@╩ŠļŖ┬ĘŻ¼ėąą¦Ąž╣Ø╩Ī┴╦PLCĄ─I/O³cŻ¼║å╗»┴╦ė▓╝■ļŖ┬ĘŻ¼▓ó└¹ė├╣”─▄ųĖ┴ŅīŹ¼FöĄō■Ą─┤µā”║═é„▌öŻ¼─▄śOĘĮ▒ŃĄžīŹ¼FöĄō■Ą─į┌ŠĆ▌ö╚ļ╗“ą▐Ė─Ż©╚ń▀\ąąŅl┬╩Ą─ą▐Ė─Ż®ĪŻ×ķ▒▄├Ōį┌ŽĄĮy▀\ąąųąō▄äėķ_ĻP┐╔─▄ĮoŽĄĮyįņ│╔Ą─ė░ĒæŻ¼įOų├ę╗éĆ▌ö╚ļµIŻ¼«ö┤_šJĖ„Ų¼ō▄▒PČ╝ō▄ĄĮ╬╗║¾į┘░┤įōµIŻ¼▀@ĢröĄō■▓┼▒╗PLCūx╚╦▓ó╠Ä└ĒĪŻ
¼F┤·PLCį┌▒Ż│ųŲõÅŖ┤¾Ą─öĄūų┴┐┐žųŲ─▄┴”Ą─═¼ĢrŻ¼╗∙▒ŠČ╝Š▀éõ┴╦─ŻöM┴┐ą┼╠¢Öz£yĪó▀\╦Ń╝░▌ö│÷┐žųŲ─▄┴”Ż¼╣”─▄ę▓╚šęµ═Ļ╔ŲĪŻĄ½╩ŪŻ¼Ė„éĆ╔·«aÅS╝ę╔·«aĄ─PLC─ŻöM┴┐▌ö╚ļŻ»▌ö│÷─ŻēKĄ─╝╝ągąį─▄▀Ć╩Ūėąę╗Č©▓ŅäeŻ¼╠ß╣®Ą─╣”─▄ųĖ┴Ņį┌öĄ─┐ĪóĖ±╩Į╝░▀\╦Ń─▄┴”╔Žę▓▓╗▒MŽÓ═¼ĪŻ
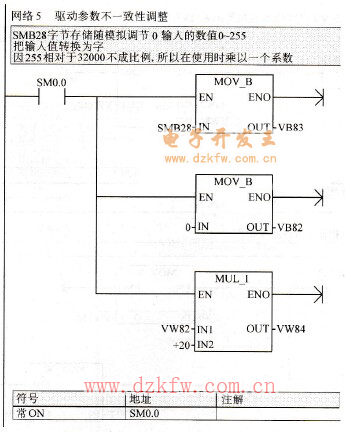
Å─╔Ž├µĄ─│╠ą“┐╔ęį┐┤│÷Ż¼S7 -200ŽĄ┴ąPLC─ŻöM┴┐ĄžųĘČ©┴x║åå╬ŪÕ╬·Ż¼╚ńöĄūų┴┐▌ö╚╦×ķIWŻ¼öĄūų┴┐▌ö│÷×ķQWŻ¼Č°─ŻöM┴┐▌ö╚ļ×ķAIWŻ¼─ŻöM┴┐▌ö│÷×ķAQWŻ¼į÷╝ė┴╦ę╗éĆ┤·▒Ē─ŻöM┴┐( Analog)Ą─ūųŅ^Ż¼Įo╩╣ė├ĦüĒ┴╦śO┤¾Ą─ĘĮ▒ŃĪŻČ°į┌S7 -200ŽĄ┴ąPLC╔Ž╝»│╔Ą──ŻöMš{╣ØļŖ╬╗Ų„Ż©ī”æ¬╠ž╩Ō┤µā”Ų„ś╦ųŠSMB28║═SMB29Ż®į┌─ŻöM┴┐╠Ä└Ēųąū„×ķ▓╗Įø│ŻĖ─ūāĄ─ģóöĄĄ─š{╣ØŻ¼╩╣ė├ŲüĒę▓ĘŪ│Żņ`╗ŅŻ¼▒╚╚ń┐╔ū„×ķ▓╔śė┤╬öĄŅAų├ųĄĪóą┼╠¢š{╣ØĄ╚ĪŻ
į┌╣żśI¼Fł÷ųąŻ¼üĒūį┐žųŲ¼Fł÷Ą──ŻöM┴┐ą┼╠¢Ż¼│Ż│ŻĢ■ę“×ķ¼Fł÷Ą─╦▓ĢrĖ╔ö_Č°«a╔·▌^┤¾Ą─▓©äėŻ¼╩╣Ą├PLC╦∙▓╔╝»ĄĮĄ─ą┼╠¢│÷¼F▓╗šµīŹąįĪŻ╚ń╣¹āHāHė├╦▓Ģr▓╔śėųĄüĒ▀Mąą┐žųŲėŗ╦ŃŻ¼Š═Ģ■«a╔·▌^┤¾Ą─š`▓ŅŻ¼ę“┤╦ąĶę¬ī”▌ö╚ļą┼╠¢▀MąąöĄūų×V▓©Ż¼üĒ½@Ą├_ę╗éĆ▌^×ķ£╩┤_Ą─▌ö╚ļųĄĪŻī”▌ö╚ļą┼╠¢▀MąąöĄūų×V▓©Ż¼ų„ę¬╩Ūį┌│╠ą“įOėŗųą└¹ė├▄ø╝■Ą─ĘĮĘ©ĪóüĒŽ¹│²Ė╔ö_╦∙ĦüĒĄ─ļSÖCš`▓ŅĪŻ│Żė├Ą─öĄūų×V▓©ĘĮĘ©ėąæTąį×V▓©Ę©ĪóŲĮŠ∙ųĄ×V▓©Ę©ĪóųąķgųĄ×V▓©Ę©Ą╚ĪŻ▒Š└²▓╔ė├ŲĮŠ∙ųĄ×V▓©Ę©šf├„┴╦ŲõPLC│╠ą“Ą─įOėŗĘĮĘ©ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū