
ę╗Īórsė|░l(f©Ī)Ų„┼csrė|░l(f©Ī)Ų„Ą─ģ^(q©▒)äe
RSė|░l(f©Ī)Ų„×ķĪ░ų├╬╗ā×(y©Łu)Ž╚Ī▒ą═ė|░l(f©Ī)Ų„Ż©«ö(d©Īng)R║═S“ī(q©▒)äėą┼╠¢═¼Ģr(sh©¬)×ķĪ░1Ī▒Ģr(sh©¬)Ż¼ė|░l(f©Ī)Ų„ūŅĮK×ķų├╬╗ĀŅæB(t©żi)Ż®Ż╗

SRė|░l(f©Ī)Ų„×ķĪ░Å═(f©┤)╬╗ā×(y©Łu)Ž╚Ī▒ą═ė|░l(f©Ī)Ų„Ż©«ö(d©Īng)R║═S“ī(q©▒)äėą┼╠¢═¼Ģr(sh©¬)×ķĪ░1Ī▒Ģr(sh©¬)Ż¼ė|░l(f©Ī)Ų„ūŅĮK×ķÅ═(f©┤)╬╗ĀŅæB(t©żi)Ż®ĪŻ

RSė|░l(f©Ī)Ų„║═SRė|░l(f©Ī)Ų„Ą─Ī░╬╗ĄžųĘĪ▒Īóų├╬╗Ż©SŻ®ĪóÅ═(f©┤)Ż©SŻ®╝░▌ö│÷Ż©QŻ®╦∙╩╣ė├Ą─▓┘ū„öĄ(sh©┤)┐╔ęį╩ŪŻ║IĪóQĪóMĪóLĪóDĪŻ
SRŻ║╚ń╣¹įO(sh©©)ų├(S1)║═Å═(f©┤)įŁ(R)ą┼╠¢Š∙×ķšµīŹ(sh©¬)Ż¼ät▌ö│÷(OUT)×ķšµīŹ(sh©¬)Ż║
▌ö│÷(OUT)×ķšµīŹ(sh©¬)Ż¼╝┤×ķų├╬╗ā×(y©Łu)Ž╚Ż¼╝┤ā╔š▀Š∙×ķ1Ģr(sh©¬)Ż¼ätų├╬╗×ķ1(ų├╬╗ā×(y©Łu)Ž╚)ĪŻ
RSŻ║╚ń╣¹įO(sh©©)ų├(S)║═Å═(f©┤)įŁ(R1)ą┼╠¢Š∙×ķšµīŹ(sh©¬)Ż¼ät▌ö│÷(OUT)×ķ╠ō╝┘Ż║
▌ö│÷(OUT)×ķ╠ō╝┘Ż¼╝┤×ķÅ═(f©┤)╬╗ā×(y©Łu)Ž╚Ż¼╝┤ā╔š▀Š∙×ķ1Ģr(sh©¬)Ż¼ätų├Å═(f©┤)╬╗╬╗×ķ1(Å═(f©┤)╬╗ā×(y©Łu)Ž╚)ĪŻ
š²┤_Ą─ųĖ┴ŅłDŲ¼
Ģr(sh©¬)ą“łD
Č■ĪóSTEP7ā╔ĘNė|░l(f©Ī)Ų„Ż║RSė|░l(f©Ī)Ų„║═SRė|░l(f©Ī)Ų„Ą─ģ^(q©▒)äe
SR╩Ūęįų├╬╗ā×(y©Łu)Ž╚üĒ▀M(j©¼n)ąą│╠ą“Ēææ¬(y©®ng)Ą─Ż╗RS╩ŪÅ═(f©┤)╬╗ā×(y©Łu)Ž╚üĒ▀M(j©¼n)ąąĒææ¬(y©®ng)Ą─ĪŻ
į┌ŠÄ│╠ą“╠▌ą╬łDĢr(sh©¬)Ż¼ų╗ę¬┐╝æ]äėū„ā×(y©Łu)Ž╚╝ē╝░═Ō▓┐Ą─ŠC║ŽŚl╝■üĒ▀M(j©¼n)ąą▀xō±ė├──éĆ(g©©)╝┤┐╔ĪŻ
į┌ŠÄ▌ŗSTL│╠ą“Ģr(sh©¬)Ż¼▀@ā╔ĘNŠ═¤oąĶ┐╝æ]┴╦Ż¼ę╗░Ń╩ŪŽ╚Å═(f©┤)╬╗Ż¼į┌ų├╬╗Š═║├ĪŻ
╚²ĪóRSė|░l(f©Ī)Ų„┼c┐╔┐žRSė|░l(f©Ī)Ų„Ą─ģ^(q©▒)äe
ų├╬╗'S'║═Å═(f©┤)╬╗'R'ą┼╠¢═¼Ģr(sh©¬)×ķ1Ģr(sh©¬)Ą─ā×(y©Łu)Ž╚╝ēėąģ^(q©▒)äeĪŻ
RSė|░l(f©Ī)Ų„«ö(d©Īng)ų├╬╗║═Å═(f©┤)╬╗ą┼╠¢Š∙×ķ1Ģr(sh©¬)Ż¼▌ö│÷×ķ0Ż¼Å═(f©┤)╬╗ā×(y©Łu)Ž╚Ż╗
SRė|░l(f©Ī)Ų„«ö(d©Īng)ų├╬╗║═Å═(f©┤)╬╗ą┼╠¢Š∙×ķ1Ģr(sh©¬)Ż¼▌ö│÷×ķ1Ż¼ų├╬╗ā×(y©Łu)Ž╚ĪŻ
ėą╗∙▒ŠRSė|░l(f©Ī)Ų„║══¼▓ĮRSė|░l(f©Ī)Ų„ĪŻ─Ńæ¬(y©®ng)įōšfĄ─╩Ū═¼▓ĮĄ─░čŻ¼ėąę╗éĆ(g©©)Ģr(sh©¬)ńŖ├}ø_CP▌ö╚ļČ╦┐žųŲŻ¼RŻ¼S×ķą┼╠¢▌ö╚ļČ╦ĪŻ
╦─Īó╗∙▒ŠRSė|░l(f©Ī)Ų„║══¼▓ĮRSė|░l(f©Ī)Ų„Ą─▓Ņäe
╗∙▒ŠRSė|░l(f©Ī)Ų„Š═╚ń═¼ę╗░ŃĄ─ė|░l(f©Ī)Ų„ę╗śėū±čŁRSė|░l(f©Ī)Ų„╣½╩ĮĪŻ
Č°═¼▓ĮRSė|░l(f©Ī)Ų„│²┴╦ę¬ū±čŁę╗░Ńrsė|░l(f©Ī)Ų„╣½╩Įęį═Ō▀Ćę¬Įė╩▄ę╗éĆ(g©©)═Ō╝ėĄ─Ģr(sh©¬)ńŖą┼╠¢Ż¼─▄ē“ūīę╗éĆ(g©©)╗“š▀ČÓéĆ(g©©)rsė|░l(f©Ī)Ų„═¼▓Į▀\(y©┤n)ąąĪŻ
╣½╩Įę▓Ģ■į┌įŁüĒĄ─╗∙ĄA(ch©│)╔Ž┼cę╗éĆ(g©©)Ģr(sh©¬)ńŖą┼╠¢Ą─Ė▀ļŖŲĮ(╗“š▀Ą═ļŖŲĮ)ĪŻ
╬ÕĪó═¼▓ĮRSė|░l(f©Ī)Ų„ļŖ┬ĘĮY(ji©”)śŗ(g©░u)┼c╣żū„įŁ└Ē
1ĪóļŖ┬ĘĮY(ji©”)śŗ(g©░u)
╚ńłD1╦∙╩Šį┌╗∙▒ŠRSė|░l(f©Ī)Ų„Ą─╗∙ĄA(ch©│)╔Žį÷╝ėG3ĪóG4ā╔éĆ(g©©)┼cĘŪķTśŗ(g©░u)│╔ė|░l(f©Ī)ę²ī¦(d©Żo)ļŖ┬ĘŻ¼Ųõ▌ö│÷Ęųäeū„×ķ╗∙▒ŠRSė|░l(f©Ī)Ų„Ą─RČ╦║═SČ╦ĪŻ
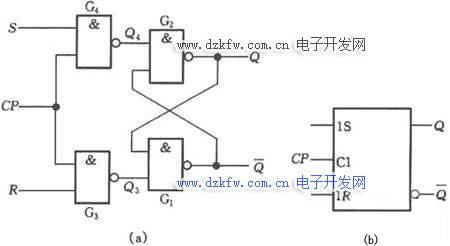
łD1 ═¼▓ĮRSė|░l(f©Ī)Ų„(a)ļŖ┬ĘĮY(ji©”)śŗ(g©░u)(b)▀ē▌ŗĘ¹╠¢
2Īó╣żū„įŁ└Ē
ė╔łD1┐╔ų¬Ż¼G3║═G4═¼Ģr(sh©¬)╩▄CPą┼╠¢┐žųŲŻ¼«ö(d©Īng)CP×ķ0Ģr(sh©¬)Ż¼G3║═G4▒╗ĘŌµiŻ¼ RĪóS▓╗Ģ■ė░Ēæė|░l(f©Ī)Ų„Ą─ĀŅæB(t©żi)Ż╗«ö(d©Īng)CP×ķ1Ģr(sh©¬)Ż¼G3║═G4┤“ķ_Ż¼īóRĪóSČ╦Ą─ą┼╠¢é„╦═ĄĮ╗∙▒ŠRSė|░l(f©Ī)Ų„Ą─▌ö╚ļČ╦Ż¼ė|░l(f©Ī)Ų„ė|░l(f©Ī)ĘŁ▐D(zhu©Żn)ĪŻĮY(ji©”)║Ž╗∙▒ŠRSė|░l(f©Ī)Ų„Ą─╣żū„įŁ└ĒŻ¼╬ęéā┐╔ęįĄ├ĄĮęįŽ┬ĮY(ji©”)šōĪŻ
1.«ö(d©Īng)CP=0Ģr(sh©¬)
Q3=Q4=1Ż¼ė|░l(f©Ī)Ų„▒Ż│ųįŁüĒĀŅæB(t©żi)▓╗ūāĪŻ
2.«ö(d©Īng)CP=1Ģr(sh©¬)
╚¶R=0 Ż¼S=1Ż╗ Q3=1Ż¼Q4=0Ż¼ė|░l(f©Ī)Ų„ų├1Ż╗
╚¶R=1 Ż¼S=0Ż╗ Q3=0Ż¼Q4=1Ż¼ė|░l(f©Ī)Ų„ų├0Ż╗
╚¶R=S=0Ż╗ Q3=Q4=1Ż¼ė|░l(f©Ī)Ų„ĀŅæB(t©żi)▒Ż│ų▓╗ūāŻ╗
╚¶R=S=1Ż╗ Q3=Q4=0Ż¼ė|░l(f©Ī)Ų„ĀŅæB(t©żi)▓╗Č©Ż╗
┐╔ęŖRČ╦║═SČ╦Č╝╩ŪĖ▀ļŖŲĮėąą¦Ż¼╦∙ęįRČ╦║═SČ╦▓╗─▄═¼Ģr(sh©¬)×ķ1Ż¼Ųõ▀ē▌ŗĘ¹╠¢ųąĄ─RČ╦║═SČ╦ę▓ø]ėąąĪłA╚”ĪŻ
┴∙ĪóRSė|░l(f©Ī)Ų„
╗∙▒ŠRS ė|░l(f©Ī)Ų„: ļŖ┬ĘĮY(ji©”)śŗ(g©░u) ░čā╔éĆ(g©©)┼cĘŪķTG1ĪóG2Ą─▌ö╚ļĪó▌ö│÷Č╦Į╗▓µ▀BĮėŻ¼╝┤┐╔śŗ(g©░u)│╔╗∙▒ŠRSė|░l(f©Ī)Ų„ĪŻ╦³ėąā╔éĆ(g©©)▌ö╚ļČ╦RĪóS║═ā╔éĆ(g©©)▌ö│÷Č╦QĪóQĪŻ
╣żū„įŁ└Ē
╗∙▒ŠRSė|░l(f©Ī)Ų„Ą─▀ē▌ŗĘĮ│╠×ķŻ║ Ė∙ō■(j©┤)╔Ž╩÷ā╔éĆ(g©©)╩ĮūėĄ├ĄĮ╦³Ą─╦─ĘN▌ö╚ļ┼c▌ö│÷Ą─ĻP(gu©Īn)ŽĄ:
1.«ö(d©Īng)R=1ĪóS=0Ģr(sh©¬)Ż¼ätQ=0,Q=1,ė|░l(f©Ī)Ų„ų├1ĪŻ
2.«ö(d©Īng)R=0ĪóS=1Ģr(sh©¬)Ż¼ätQ=1,Q=0,ė|░l(f©Ī)Ų„ų├0ĪŻ ╚ń╔Ž╦∙╩÷Ż¼«ö(d©Īng)ė|░l(f©Ī)Ų„Ą─ā╔éĆ(g©©)▌ö╚ļČ╦╝ė╚ļ▓╗═¼▀ē▌ŗļŖŲĮĢr(sh©¬)Ż¼╦³Ą─ā╔éĆ(g©©)▌ö│÷Č╦Q║═Qėąā╔ĘN╗źča(b©│)Ą─ĘĆ(w©¦n)Č©ĀŅæB(t©żi)ĪŻę╗░ŃęÄ(gu©®)Č©ė|░l(f©Ī)Ų„QČ╦Ą─ĀŅæB(t©żi)ū„×ķė|░l(f©Ī)Ų„Ą─ĀŅæB(t©żi)ĪŻ═©│ŻĘQė|░l(f©Ī)Ų„╠Äė┌─│ĘNĀŅæB(t©żi)Ż¼īŹ(sh©¬)ļH╩ŪųĖ╦³Ą─QČ╦Ą─ĀŅæB(t©żi)ĪŻQ=1ĪóQ=0Ģr(sh©¬)Ż¼ĘQė|░l(f©Ī)Ų„╠Äė┌1æB(t©żi)Ż¼Ę┤ų«ė|░l(f©Ī)Ų„╠Äė┌0æB(t©żi)ĪŻS=0,R=1╩╣ė|░l(f©Ī)Ų„ų├1Ż¼╗“ĘQų├╬╗ĪŻę“ų├╬╗Ą─øQČ©Śl╝■╩ŪS=0,╣╩ĘQS Č╦×ķų├1Č╦ĪŻR=0,S=1Ģr(sh©¬)Ż¼╩╣ė|░l(f©Ī)Ų„ų├0Ż¼╗“ĘQÅ═(f©┤)╬╗ĪŻ
═¼└ĒŻ¼ĘQRČ╦×ķų├0Č╦╗“Å═(f©┤)╬╗Č╦ĪŻ╚¶ė|░l(f©Ī)Ų„įŁüĒ×ķ1æB(t©żi)Ż¼ė¹╩╣ų«ūā?y©Łu)?æB(t©żi)Ż¼▒žĒÜ┴ŅRČ╦Ą─ļŖŲĮė╔1ūā0Ż¼SČ╦Ą─ļŖŲĮė╔0ūā1ĪŻ▀@└’╦∙╝ėĄ─▌ö╚ļą┼╠¢(Ą═ļŖŲĮ)ĘQ×ķė|░l(f©Ī)ą┼╠¢Ż¼ė╔╦³éāī¦(d©Żo)ų┬Ą─▐D(zhu©Żn)ōQ▀^│╠ĘQ×ķĘŁ▐D(zhu©Żn)ĪŻė╔ė┌▀@└’Ą─ė|░l(f©Ī)ą┼╠¢╩ŪļŖŲĮ,ę“┤╦▀@ĘNė|░l(f©Ī)Ų„ĘQ×ķļŖŲĮ┐žųŲė|░l(f©Ī)Ų„ĪŻ
Å─╣”─▄ĘĮ├µ┐┤Ż¼╦³ų╗─▄į┌S║═RĄ─ū„ė├Ž┬ų├0║═ų├1Ż¼╦∙ęįėųĘQ×ķų├0ų├1ė|░l(f©Ī)Ų„Ż¼╗“ĘQ×ķų├╬╗Å═(f©┤)╬╗ė|░l(f©Ī)Ų„ĪŻŲõ▀ē▌ŗĘ¹╠¢╚ńłD7.2.1(b)╦∙╩ŠĪŻ
ė╔ė┌ų├0╗“ų├1Č╝╩Ūė|░l(f©Ī)ą┼╠¢Ą═ļŖŲĮėąą¦Ż¼ę“┤╦Ż¼SČ╦║═RČ╦Č╝«ŗėąąĪłA╚”ĪŻ
3.«ö(d©Īng)R=S=1Ģr(sh©¬)Ż¼ė|░l(f©Ī)Ų„ĀŅæB(t©żi)▒Ż│ų▓╗ūāĪŻ ė|░l(f©Ī)Ų„▒Ż│ųĀŅæB(t©żi)Ģr(sh©¬)Ż¼▌ö╚ļČ╦Č╝╝ėĘŪėąą¦ļŖŲĮ(Ė▀ļŖŲĮ)Ż¼ąĶę¬ė|░l(f©Ī)ĘŁ▐D(zhu©Żn)Ģr(sh©¬)Ż¼ę¬Ū¾į┌─│ę╗▌ö╚ļČ╦╝ėę╗žō(f©┤)├}ø_Ż¼└²╚ńį┌SČ╦╝ėžō(f©┤)├}ø_╩╣ė|░l(f©Ī)Ų„ų├1Ż¼įō├}ø_ą┼╠¢╗žĄĮĖ▀ļŖŲĮ║¾Ż¼ė|░l(f©Ī)Ų„╚įŠS│ų1ĀŅæB(t©żi)▓╗ūāŻ¼ŽÓ«ö(d©Īng)ė┌░čSČ╦─│ę╗Ģr(sh©¬)┐╠Ą─ļŖŲĮą┼╠¢┤µā”ŲüĒŻ¼▀@¾w¼F(xi©żn)┴╦ė|░l(f©Ī)Ų„Š▀ėąėøæø╣”─▄ĪŻ
4.«ö(d©Īng)R=S=0Ģr(sh©¬)Ż¼ė|░l(f©Ī)Ų„ĀŅæB(t©żi)▓╗┤_Č© į┌┤╦Śl╝■Ž┬Ż¼ā╔éĆ(g©©)┼cĘŪķTĄ─▌ö│÷Č╦Q║═Q╚½×ķ1Ż¼į┌ā╔éĆ(g©©)▌ö╚ļą┼╠¢Č╝═¼Ģr(sh©¬)│Ę╚ź(╗žĄĮ1)║¾Ż¼ė╔ė┌ā╔éĆ(g©©)┼cĘŪķTĄ─čė▀tĢr(sh©¬)ķg¤oĘ©┤_Č©Ż¼ė|░l(f©Ī)Ų„Ą─ĀŅæB(t©żi)▓╗─▄┤_Č©╩Ū1▀Ć╩Ū0,ę“┤╦ĘQ▀@ĘNŪķør×ķ▓╗Č©ĀŅæB(t©żi)Ż¼▀@ĘNŪķøræ¬(y©®ng)«ö(d©Īng)▒▄├ŌĪŻÅ─┴Ē═Ōę╗éĆ(g©©)ĮŪČ╚üĒšfŻ¼š²ę“?y©żn)ķRČ╦║═SČ╦═Ļ│╔ų├0Īóų├1Č╝╩ŪĄ═ļŖŲĮėąą¦Ż¼╦∙ęįČ■š▀▓╗─▄═¼Ģr(sh©¬)×ķ0ĪŻ
┤╦═Ō,▀Ć┐╔ęįė├╗“ĘŪķTĄ─▌ö╚ļĪó▌ö│÷Č╦Į╗▓µ▀BĮėśŗ(g©░u)│╔ų├0Īóų├1ė|░l(f©Ī)Ų„ĪŻ
▀@ĘNė|░l(f©Ī)Ų„Ą─ė|░l(f©Ī)ą┼╠¢╩ŪĖ▀ļŖŲĮėąą¦Ż¼ę“┤╦į┌▀ē▌ŗĘ¹╠¢Ą─SČ╦║═RČ╦ø]ėąąĪłA╚”ĪŻ
╣”─▄├Ķ╩÷: ĀŅæB(t©żi)▐D(zhu©Żn)ęŲšµųĄ▒Ē ė├▒ĒĖ±Ą─ą╬╩Į├Ķ╩÷ė|░l(f©Ī)Ų„į┌▌ö╚ļą┼╠¢ū„ė├Ž┬Ż¼ė|░l(f©Ī)Ų„Ą─Ž┬ę╗éĆ(g©©)ĘĆ(w©¦n)Č©ĀŅæB(t©żi)(┤╬æB(t©żi))Qn+1┼cė|░l(f©Ī)Ų„Ą─įŁĘĆ(w©¦n)Č©ĀŅæB(t©żi)(¼F(xi©żn)æB(t©żi))Qn║═▌ö╚ļą┼╠¢ĀŅæB(t©żi)ų«ķgĄ─ĻP(gu©Īn)ŽĄĪŻ
2.╠žš„ĘĮ│╠
╝┤ęį▀ē▌ŗ║»öĄ(sh©┤)Ą─ą╬╩ĮüĒ├Ķ╩÷┤╬æB(t©żi)┼c¼F(xi©żn)æB(t©żi)╝░▌ö╚ļą┼╠¢ų«ķgĄ─ĻP(gu©Īn)ŽĄĪŻė╔╔Ž╩÷ĀŅæB(t©żi)▐D(zhu©Żn)ęŲšµųĄ▒ĒŻ¼═©▀^┐©ųZłD╗»║å┐╔Ą├ĄĮĪŻ
3.ĀŅæB(t©żi)▐D(zhu©Żn)ęŲłD
╝┤ęįłDą╬Ą─ĘĮ╩Į├Ķ╩÷ė|░l(f©Ī)Ų„Ą─ĀŅæB(t©żi)ūā╗»ī”▌ö╚ļą┼╠¢Ą─ę¬Ū¾ĪŻ
łD7.2.4╩Ū╗∙▒ŠRSė|░l(f©Ī)Ų„Ą─ĀŅæB(t©żi)▐D(zhu©Żn)ęŲłDĪŻłDųąā╔éĆ(g©©)łA╚”┤·▒Ēė|░l(f©Ī)Ų„Ą─ā╔éĆ(g©©)ĀŅæB(t©żi)Ż╗╝²Ņ^▒Ē╩Šį┌ė|░l(f©Ī)Ų„Ą─▌ö╚ļą┼╠¢ū„ė├Ž┬ĀŅæB(t©żi)▐D(zhu©Żn)ęŲĄ─ĘĮŽ“Ż╗╝²Ņ^┼į▀ģė╔ą▒ŠĆĪ░/Ī▒Ęųķ_Ą─┤·┤aĘųäe▒Ē╩ŠĀŅæB(t©żi)▐D(zhu©Żn)ęŲĄ─Śl╝■║═į┌┤╦Śl╝■Ž┬«a(ch©Żn)╔·Ą─▌ö│÷ĀŅæB(t©żi)ĪŻ
įO(sh©©)ė|░l(f©Ī)Ų„Ą─│§╩╝ĀŅæB(t©żi)×ķQ=0ĪóQ=1Ż¼«ö(d©Īng)SDĄ─Ž┬ĮĄčžĄĮ▀_(d©ó)║¾Ż¼Įø(j©®ng)▀^G1Ą─é„▌öčė▀tĢr(sh©¬)ķgtpdŻ¼QČ╦ūā?y©Łu)ķĖ▀ļŖŲĮĪŻ▀@éĆ(g©©)Ė▀ļŖŲĮ╝ėĄĮķTG2Ą─▌ö╚ļČ╦Ż¼į┘Įø(j©®ng)▀^ķTG2Ą─é„▌öčė▀tĢr(sh©¬)ķgtpd,╩╣Qūā?y©Łu)ķĄ═ļŖŲĮĪ?/P>
«ö(d©Īng)QĄ─Ą═ļŖŲĮĘ┤üĄĮG1Ą─▌ö╚ļČ╦ęį║¾,╝┤╩╣SD=0Ą─ą┼╠¢Ž¹╩¦(╝┤SD╗žĄĮĖ▀ļŖŲĮ)Ż¼ė|░l(f©Ī)Ų„▒╗ų├│╔Q=1ĀŅæB(t©żi)ę▓īó▒Ż│ųŽ┬╚źĪŻ┐╔ęŖŻ¼×ķ▒ŻūCė|░l(f©Ī)Ų„┐╔┐┐ĄžĘŁ▐D(zhu©Żn)Ż¼▒žĒÜĄ╚ĄĮQ=0Ą─ĀŅæB(t©żi)Ę┤üĄĮG1Ą─▌ö╚ļČ╦ęį║¾Ż¼SD=0Ą─ą┼╠¢▓┼┐╔ęį╚ĪŽ¹ĪŻ
ę“┤╦Ż¼SD▌ö╚ļĄ─Ą═ļŖŲĮą┼╠¢īÆČ╚twæ¬(y©®ng)ØMūŃtwĪ▌2tpdĪŻ═¼└ĒŻ¼╚ń╣¹Å─RDČ╦▌ö╚ļų├0ą┼╠¢Ż¼ŲõīÆČ╚ę▓▒žĒÜ┤¾ė┌ĪóĄ╚ė┌2tpdĪŻ
2.é„▌öčė▀tĢr(sh©¬)ķg: Å─▌ö╚ļą┼╠¢ĄĮ▀_(d©ó)ŲŻ¼ĄĮė|░l(f©Ī)Ų„▌ö│÷Č╦ą┬ĀŅæB(t©żi)ĘĆ(w©¦n)Č©ĄžĮ©┴óŲüĒ×ķų╣Ż¼╦∙Įø(j©®ng)▀^Ą─▀@Č╬Ģr(sh©¬)ķgĘQ×ķė|░l(f©Ī)Ų„Ą─é„▌öčė▀tĢr(sh©¬)ķgĪŻ
Å─╔Ž├µĄ─Ęų╬÷ęčĮø(j©®ng)┐╔ęį┐┤│÷Ż¼▌ö│÷Č╦Å─Ą═ļŖŲĮūā?y©Łu)ķĖ▀ļŖŲĮĄ─é„▌öčė▀tĢr(sh©¬)ķgtPLH║═Å─Ė▀ļŖŲĮūā?y©Łu)ķĄ═ļŖŲĮĄ─é„▌öčė▀tĢr(sh©¬)ķgtPHL╩Ū▓╗ŽÓĄ╚Ą─Ż¼╦³éāĘųäe×ķŻ║ tPLH=tpdŻ¼tPHL=2tpd ╚¶╗∙▒ŠRSė|░l(f©Ī)Ų„ė╔╗“ĘŪķTĮM│╔Ż¼ätŲõé„▌öčė▀tĢr(sh©¬)ķgīó×ķ tPHL=tpdŻ¼tPLH=2tpd ĪŻ
ī”╗∙▒ŠRS ė|░l(f©Ī)Ų„Üw╝{×ķęįŽ┬Äū³c(di©Żn)Ż║
1.╗∙▒ŠRSė|░l(f©Ī)Ų„Š▀ėąų├╬╗ĪóÅ═(f©┤)╬╗║═▒Ż│ų(ėøæø)Ą─╣”─▄Ż╗
2.╗∙▒ŠRSė|░l(f©Ī)Ų„Ą─ė|░l(f©Ī)ą┼╠¢╩ŪĄ═ļŖŲĮėąą¦Ż¼ī┘ė┌ļŖŲĮė|░l(f©Ī)ĘĮ╩ĮŻ╗
3.╗∙▒ŠRSė|░l(f©Ī)Ų„┤µį┌╝s╩°Śl╝■(R+S=1)Ż¼ė╔ė┌ā╔éĆ(g©©)┼cĘŪķTĄ─čė▀tĢr(sh©¬)ķg¤oĘ©┤_Č©Ż╗«ö(d©Īng)R=S=0Ģr(sh©¬)Ż¼īóī¦(d©Żo)ų┬Ž┬ę╗ĀŅæB(t©żi)Ą─▓╗┤_Č©ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū