
Ū░čįŻ║
ęįŪ░Č╝╩Ū▓╔ė├Ą─Ģrķg/ėŗöĄ▌åįā═©ėŹŻ¼ėąā╔éĆ╚▒³cŻ¼ę╗╩Ū▌åįāĢrķg▌^ķLŻ¼Č■╩Ū╚▌ęūįņ│╔Õ┤ÖCŻ¼öĄō■é„▌ö▓╗▀^üĒĪŻ
į┌╬¶╚š═¼╩┬Ą─ųĖī¦Ž┬Ż¼▒Š┤╬▓╔ė├ś╦ųŠ╬╗üĒ“īäė▌åįāŻ¼╦┘Č╚║═ĘĆČ©ąįĄ├ĄĮ┴╦▌^┤¾Ą─╠ß╔²ĪŻ
Š▀¾wīŹ¼Fšf├„Ż║
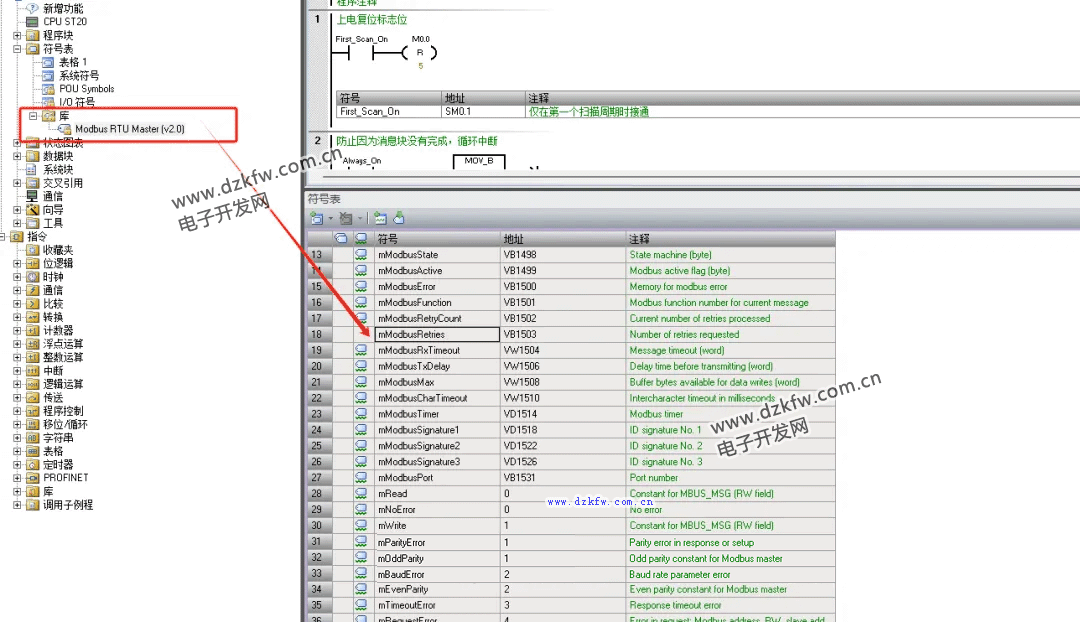
ŠWĮj1Ż║Å═╬╗╦∙ėąś╦ųŠ╬╗Ż¼Ę└ų╣ŽĄĮy¤oĘ©▀\ąąĪŻ
▀@└’ėą5éĆś╦ųŠ╬╗Ż¼Ž┬├µ│╠ą“ųą┐╔ęį┐┤│÷ĪŻ
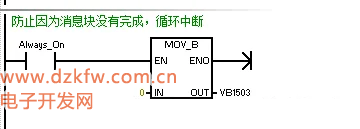
ŠWĮj2Ż║īóųžįć┤╬öĄįOų├×ķ0
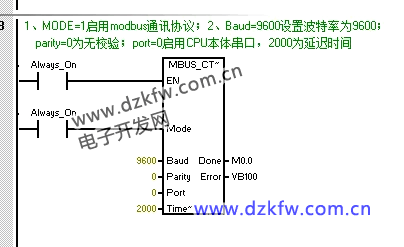
ŠWĮj3Ż║åóäėų„šŠ┐žųŲ│╠ą“Ż¼įOų├ĘĮ╩Įģó┐╝╚ńŽ┬Ż║
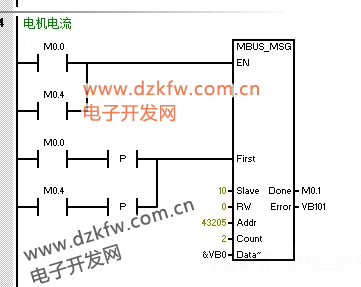
ŠWĮj╦─Ż║Ą┌ę╗éĆöĄō■▓╔╝»Ż¼ś╦ųŠ╬╗×ķM0.1ĪŻ
ŠWĮj╬ÕŻ║
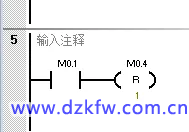
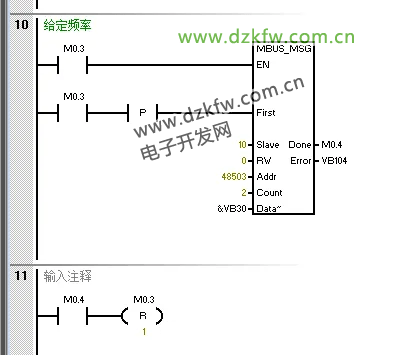
Å═╬╗ūŅ║¾ę╗éĆ▓╔╝»ą┼ŽóĄ─ś╦ųŠ╬╗
ŠWĮj┴∙ĪóŲ▀Ż║▓╔╝»Ą┌Č■éĆöĄō■║═Å═╬╗Ą┌ę╗éĆś╦ųŠ╬╗
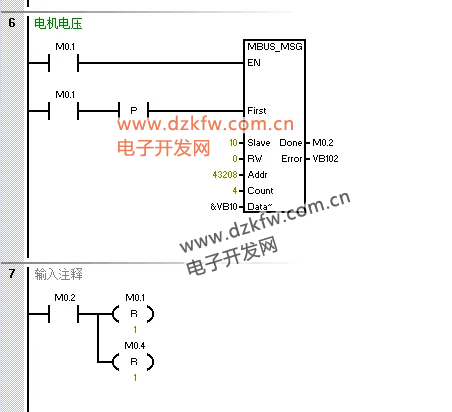
ŠWĮj░╦ĪóŠ┼Ż║▓╔╝»Ą┌3éĆöĄō■║═Å═╬╗Ą┌2éĆś╦ųŠ╬╗
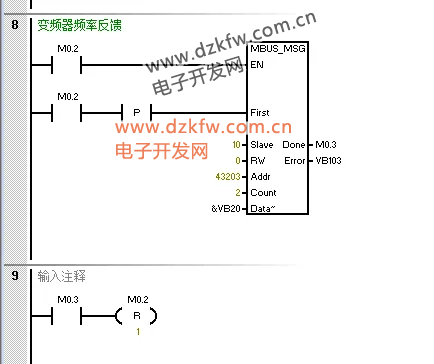
ŠWĮj╩«Īó╩«ę╗Ż║▓╔╝»Ą┌4éĆöĄō■║═Å═╬╗Ą┌3éĆś╦ųŠ╬╗
ŠWĮj╩«Č■Īó╩«╚²:▓╔╝»▀^üĒĄ─öĄō■ėŗ╦Ń║═▐DōQĪŻ
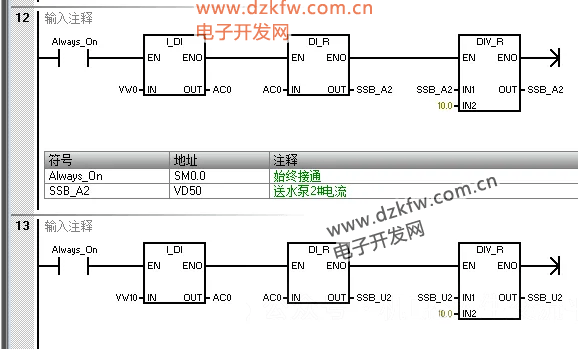
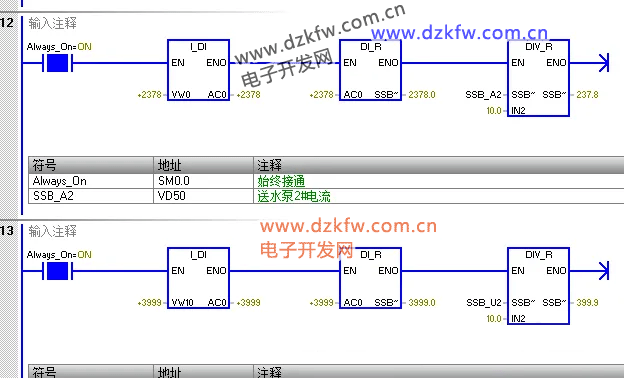
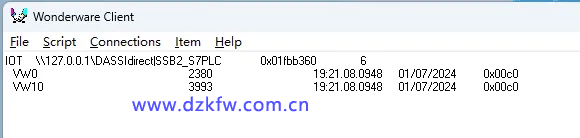
ę╗░Ńūx▀^üĒĄ─öĄō■Č╝╩Ūš¹ą═Ż¼Ė∙ō■āx▒ĒĄ─═©ėŹ╩ųāį╗“š▀ī”šš¼Fł÷Ą─īŹļHöĄō■Ż¼╬ęéāū÷ę╗ą®║åå╬Ą─ėŗ╦ŃŠ═┐╔ęįĄ├ĄĮšµīŹöĄō■Ż¼▒╚╚ń▐DōQ×ķĖĪ³cöĄ║¾│²ęį10.0╗“š▀100.0ĪŻ
S7-200 Smart┼cūāŅlŲ„Ą─MODBUSūāŅlŲ„═©ą┼īŹ▓┘
S7-200smart ┼c│¼┬Ģ▓©┴„┴┐ėŗų«ķgĄ─MODBUS═©ėŹ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū