
ȵÖC╩Ū╩▓├┤Ż┐

╦┼Ę■ļŖÖC═©│Ż▒╗ĘQ×ķȵÖCŻ¼╦³╩Ūę╗ĘNĦėą▌ö│÷▌SĄ─ąĪčbų├ĪŻ«ö╬ęéāŽ“╦┼Ę■Ų„░l╦═ę╗éĆ┐žųŲą┼╠¢ĢrŻ¼▌ö│÷▌SŠ═┐╔ęį▐DĄĮ╠žČ©Ą─╬╗ų├ĪŻų╗ę¬┐žųŲą┼╠¢│ų└m▓╗ūāŻ¼╦┼Ę■ÖCśŗŠ═Ģ■▒Ż│ų▌SĄ─ĮŪČ╚╬╗ų├▓╗Ė─ūāĪŻ╚ń╣¹┐žųŲą┼╠¢░l╔·ūā╗»Ż¼▌ö│÷▌SĄ─╬╗ų├ę▓Ģ■ŽÓæ¬░l╔·ūā╗»ĪŻ╚š│Ż╔·╗ŅųąŻ¼ČµÖC│Ż▒╗ė├ė┌▀b┐ž’wÖCĪó▀b┐žŲ¹▄ćĪóÖCŲ„╚╦Ą╚ŅIė“ĪŻ
ȵÖCį┌ÖCŲ„╚╦ŅIė“ĘŪ│Żėąė├ĪŻę“×ķȵÖCėąā╚ų├Ą─┐žųŲļŖ┬ĘŻ¼╦³éāĄ─│▀┤ńļm╚╗║▄ąĪŻ¼Ą½▌ö│÷┴”ē“┤¾ĪŻŽ±Futaba S-148▀@śėĄ─ś╦£╩ȵÖC─▄╠ß╣® 0.3┼Ż/├ūĄ─┼żŠžŻ¼ŽÓī”ė┌╦³Ą─═Ōą╬┤¾ąĪüĒšf▀@ęčĮøūŃē“ÅŖ┤¾┴╦ĪŻ═¼ĢrŻ¼ČµÖCŽ¹║─Ą──▄┴┐┼cÖCąĄžō║╔│╔š²▒╚ĪŻę“┤╦Ż¼ę╗éĆ▌p▌dĄ─ȵÖCŽĄĮy▓╗Ģ■Ž¹║─╠½ČÓĄ──▄┴┐ĪŻ
ȵÖCĄ─ā╚▓┐ĮYśŗ
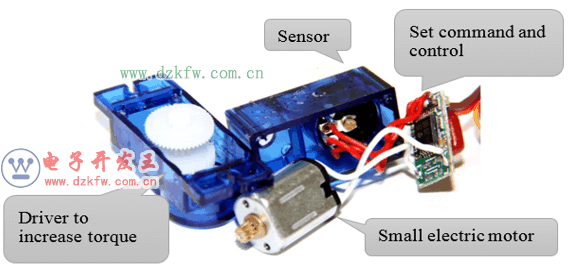
ȵÖCĄ─ā╚▓┐ĮYśŗ╚ń╔ŽłD╦∙╩ŠĪŻ─Ń┐╔ęį┐┤ĄĮ┐žųŲļŖ┬ĘŻ¼±R▀_Ż¼ę╗ĮM²X▌å║══ŌÜżĪŻ
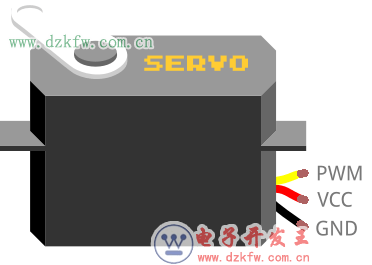
«ö╚╗▀Ć░³└©ļŖį┤ŠĆŻ©+5VŻ¼╝t╔½Ż®Ż¼ĄžŠĆŻ©GND║┌╔½Ż®║═PWM┐žųŲŠĆŻ©³S╔½╗“░ū╔½Ż®ĪŻ
ȵÖCĄ─╣żū„įŁ└Ē
ȵÖCā╚▓┐Ą─┐žųŲļŖ┬ĘŻ¼ļŖ╬╗ėŗŻ©┐╔ūāļŖūĶŲ„Ż®║═ļŖÖCŠ∙▒╗▀BĮėĄĮļŖ┬Ę░Õ╔ŽŻ¼╚ńā╚▓┐ĮYśŗłDĄ─ėę▀ģ▓┐ĘųĪŻ┐žųŲļŖ┬Ę═©▀^ļŖ╬╗ėŗ┐╔▒O┐žČµÖCĄ─«öŪ░ĮŪČ╚ĪŻ
╚ń╣¹▌SĄ─╬╗ų├┼c┐žųŲą┼╠¢ŽÓĘ¹Ż¼─Ū├┤ļŖÖCŠ═Ģ■ĻPķ]ĪŻ╚ń╣¹┐žųŲļŖ┬Ę░l¼F▀@éĆĮŪČ╚▓╗š²┤_Ż¼╦³Š═Ģ■┐žųŲ±R▀_▐DäėŻ¼ų▒ĄĮ╦³▀_ĄĮųĖČ©Ą─ĮŪČ╚ĪŻČµÖCĮŪČ╚Ė∙ō■ųŲįņ╔╠Ą─▓╗═¼Č°ėą╦∙▓╗═¼ĪŻ▒╚╚ńŻ¼ę╗éĆ180Č╚Ą─ȵÖCŻ¼╦³┐╔ęįį┌0Č╚ų┴180Č╚ų«ķg▀\äėĪŻė╔ė┌Ž▐╬╗čbų├▒╗░▓čbį┌ų„▌ö│÷čbų├╔ŽŻ¼│¼│÷▀@éĆĘČć·ÖCąĄĮYśŗŠ═▓╗─▄į┘▐Däė┴╦ĪŻ
ȵÖCĄ─▌ö│÷╣”┬╩┼c╦³╦∙ąĶę¬▐DäėĄ─ŠÓļx│╔š²▒╚ĪŻ╚ń╣¹▌ö│÷▌SąĶę¬▐Däė║▄ķLĄ─ŠÓļxŻ¼±R▀_Š═Ģ■╚½╦┘▀\▐DŻ¼╚ń╣¹╦³ų╗ąĶę¬Č╠ŠÓļx▐DäėŻ¼±R▀_Š═Ģ■ęį▌^┬²Ą─╦┘Č╚▀\ąąŻ¼▀@Įąū÷╦┘Č╚▒╚└²┐žųŲĪŻ
╚ń║╬ūīȵÖC▐DĄĮųĖČ©ĮŪČ╚Ż┐
┐žųŲŠĆė├ė┌é„▌öĮŪČ╚┐žųŲą┼╠¢ĪŻ▀@éĆĮŪČ╚╩Ūė╔┐žųŲą┼╠¢├}ø_Ą─│ų└mĢrķgøQČ©Ą─Ż¼▀@Įąū÷├}ø_ŠÄ┤aš{ųŲŻ©PCMŻ®ĪŻČµÖCĄ─┐žųŲę╗░ŃąĶę¬ę╗éĆ20msū¾ėęĄ─Ģr╗∙├}ø_Ż¼įō├}ø_Ą─Ė▀ļŖŲĮ▓┐Ęųę╗░Ń×ķ0.5ms-2.5msĘČć·Ż¼┐éķgĖ¶×ķ2msĪŻ├}ø_Ą─īÆČ╚īóøQČ©±R▀_▐DäėĄ─ŠÓļxĪŻ└²╚ńŻ║1.5║┴├ļĄ─├}ø_Ż¼ļŖÖCīó▐DŽ“90Č╚Ą─╬╗ų├Ż©═©│ŻĘQ×ķųą┴ó╬╗ų├Ż¼ī”ė┌180ĪŃȵÖCüĒšfŻ¼Š═╩Ū90ĪŃ╬╗ų├Ż®ĪŻ╚ń╣¹├}ø_īÆČ╚ąĪė┌1.5║┴├ļŻ¼─Ū├┤ļŖÖC▌SŽ“│»Ž“0Č╚ĘĮŽ“ĪŻ╚ń╣¹├}ø_īÆČ╚┤¾ė┌1.5║┴├ļŻ¼▌SŽ“Š═│»Ž“180Č╚ĘĮŽ“ĪŻęį180Č╚ȵÖC×ķ└²Ż¼ī”æ¬Ą─┐žųŲĻPŽĄ╩Ū▀@śėĄ─Ż║
0.5msĪ¬Ī¬Ī¬Ī¬-0Č╚Ż╗
1.0msĪ¬Ī¬Ī¬Ī¬45Č╚Ż╗
1.5msĪ¬Ī¬Ī¬Ī¬90Č╚Ż╗
2.0msĪ¬Ī¬Ī¬©C135Č╚Ż╗
2.5msĪ¬Ī¬Ī¬©C180Č╚Ż╗
ė├Arduino UNO ┐žųŲȵÖC
£yįćĄ─ė▓╝■Śl╝■Ż║
• 1 Ī┴ Arduino UNO.
• 1 Ī┴ ȵÖC.
• 1 Ī┴ ULN2003 “īäėICŻ©ė├ė┌Ę└ų╣ų▒Įė═©▀^Arduino“īäėȵÖCįņ│╔å¢Ņ}.Ż®
• 1 Ī┴ 10 K”Ė ļŖūĶ.
░┤ššŽ┬łD╦∙╩Š▀Mąą▀BĮėŻ¼╚ńłD╦∙╩ŠŻ║

┤“ķ_Arduino IDEŻ¼ą┬Į©ę╗éĆ╬─╝■ĪŻ

/* ╩╣ė├┐╔ūāļŖ╬╗ėŗ┐žųŲȵÖC▐Däė */
#include
Servo myservo; // äōĮ©ę╗éĆ servo object
int potpin = 0; // analog pin ė├üĒ▀BĮėļŖ╬╗ėŗ
int val; // val┤µā”analog pinĄ─ųĄ
void setup() {
myservo.attach(9); // ▀BĮėȵÖC┐žųŲą┼╠¢Ż©³S╗“░ūŻ®ų┴ pin 9
}
void loop() {
val = analogRead(potpin);
// ūx│÷┐╔ūāļŖ╬╗ėŗĄ─ųĄ (ĘČć· 0 - 1023)
val = map(val, 0, 1023, 0, 180);
// ░┤ȵÖCĮŪČ╚▀MąąįOų├ (ĘČć· 0 - 180)
myservo.write(val); //Ė∙ō■valųĄįOų├ȵÖC╬╗ų├
delay(15);
}
▀BŠĆūóęŌŻ║ȵÖCėą╚²éĆę²─_Ż©ļŖį┤ĪóGND║═ą┼╠¢Ż®ĪŻļŖį┤ŠĆ═©│Ż╩Ū╝t╔½Ą─Ż¼æ¬įō▀BĮėĄĮArduino┐žųŲ░Õ╔ŽĄ─5Vßś─_Ż╗GNDĄžŠĆ═©│Ż╩Ū║┌╔½╗“ūž╔½Ą─Ż¼æ¬įō▀BĮėĄĮULN2003 IC╔Ž10-16ßśĄ─╚╬ęŌę╗éĆŻ╗ą┼╠¢ŠĆ═©│Ż╩Ū³S╔½╗“░ū╔½Ą─Ż¼æ¬įō▀BĮėĄĮArduino 9╠¢ę²─_ĪŻ
┐╔ūāļŖ╬╗ėŗ
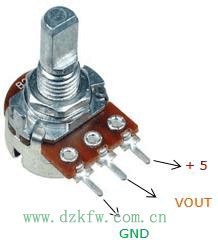
┐╔ūāļŖ╬╗ėŗ╩Ūę╗éĆĘųē║Ų„Ż¼╦³┐╔ęįĖ∙ō■┐╔ūāļŖūĶĄ─ųĄüĒš{š¹ļŖ┬ĘĄ─▌ö│÷ļŖē║Ż¼ļŖūĶ╩Ū═©▀^ą²ŌoüĒ┐žųŲĄ─ĪŻ╦³ėą╚²éĆę²─_Ż║GNDŻ¼ą┼╠¢Ż¼ +5 VŻ¼╚ńŽ┬łD╦∙╩Š
ęį╔Ž╣żū„Š═Šw▓ó╔Žé„┤·┤a║¾Ż¼š²│ŻŪķørŽ┬«ö╬ęéāą²▐D┐╔ūāļŖ╬╗ėŗŻ¼ČµÖCīóī”æ¬Ė─ūāŲõĮŪČ╚╬╗ų├ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū