
╦┼Ę■┐žųŲ
Į╗┴„╦┼Ę■ļŖÖCĄ─╣żū„įŁ└Ē
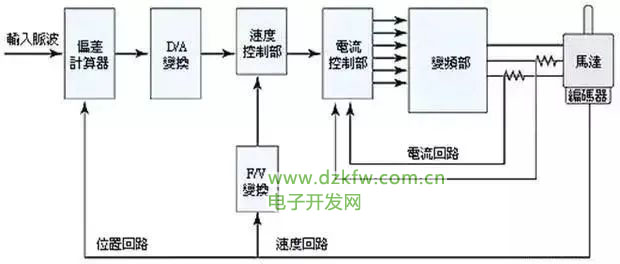
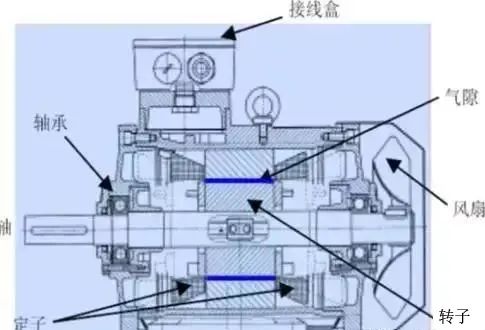
╦┼Ę■ļŖÖCā╚▓┐Ą─▐Dūė╩Ūė└┤┼ĶFŻ¼“īäėŲ„┐žųŲĄ─U/V/W╚²ŽÓļŖą╬│╔ļŖ┤┼ł÷Ż¼▐Dūėį┌┤╦┤┼ł÷Ą─ū„ė├Ž┬▐DäėŻ¼═¼ĢrļŖÖCūįĦĄ─ŠÄ┤aŲ„Ę┤üą┼╠¢Įo“īäėŲ„Ż¼“īäėŲ„Ė∙ō■Ę┤üųĄ┼c─┐ś╦ųĄ▀Mąą▒╚▌^Ż¼š{š¹▐Dūė▐DäėĄ─ĮŪČ╚ĪŻ╦┼Ę■ļŖÖCĄ─Š½Č╚øQČ©ė┌ŠÄ┤aŲ„Ą─Š½Č╚Ż©ŠĆöĄŻ®ĪŻ
╦┼Ę■ŽĄĮyĄ─ĮM│╔╝░ĘųŅÉ
ĮM│╔Ż║
╦┼Ę■ŽĄĮy╩Ūęį╬╗ų├║═ĮŪČ╚×ķ┐žųŲ┴┐Ą─┐žųŲŽĄĮyĄ─┐éĘQŻ¼┼c╬╗ų├║═ĮŪČ╚ŽÓĻP┬ōĄ─╦┘Č╚ĪóĮŪ╦┘Č╚Īó╝ė╦┘Č╚Īó┴”Ą╚×ķ┐žųŲ┴┐Ą─ŽĄĮyę▓░³║¼į┌╦┼Ę■ŽĄĮyā╚ĪŻ
ĘųŅÉŻ║
1. ░┤┐žųŲĮYśŗĘųŅÉĘų×ķŻ║ķ_Łh╩ĮĪóķ]Łh╩ĮĪŻ
2. ░┤“īäė▓┐╝■ĘųŅÉĘų×ķŻ║
a. ▓Į▀MļŖäėÖC╦┼Ę■ŽĄĮyĪŻ
b. ų▒┴„ļŖäėÖC╦┼Ę■ŽĄĮyĪŻ
c. Į╗┴„ļŖäėÖC╦┼Ę■ŽĄĮyĪŻ
╦┼Ę■±R▀_Ż©Į╗┴„Ż®Ą─╠ž³c
Ż▒. Č©╬╗Š½Č╚Ė▀Ż¼Ųš═©╦┼Ę■±R▀_┐╔▀_ĄĮ0.036Č╚
Ż▓. ╗žæ¬Ģrķg┐ņĪŻ
Ż│. ┐žųŲĘĮ▒Ńņ`╗ŅŻ¼┐žųŲŽĄĮyęūė┌īŹ¼FĪŻ
Ż┤. ą═╠¢▌^ČÓŻ¼┐╔Ė∙ō■▓╗═¼Ą─æ¬ė├ŁhŠ│▀xō±▓╗═¼Ą─ŅÉą═ĪŻ
ŻĄ. ╠ß╣®╚½ķ]Łh┐žųŲŻ¼┐╔▀mĢr▒O┐ž▀\ąąĀŅørŻ¼▀Mąą▀m«öĄ─š{š¹ūāōQĪŻ
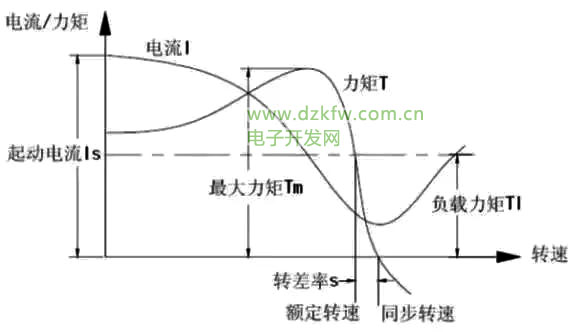
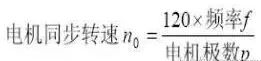
╦┼Ę■ŽĄĮyĮYśŗ
╦┼Ę■┐žųŲĄ─▀xą═▓Į¾E
1.┤_Č©ÖCąĄęÄĖ±Ż¼žō▌dĪóäéąįĄ╚ģóöĄĪŻ
2. ┤_šJäėū„ģóöĄŻ¼ęŲäė╦┘Č╚Īóąą│╠Īó╝ė£p╦┘ĢrķgĪóų▄Ų┌ĪóŠ½Č╚Ą╚ĪŻ
3. ▀xō±±R▀_æT┴┐Ż¼žō▌dæT┴┐Īó±R▀_▌Są─▐DōQæT┴┐Īó▐DūėæT┴┐ĪŻ
4. ▀xō±±R▀_╗ž▐D╦┘Č╚ĪŻ
5. ▀xō±±R▀_Ņ~Č©┼żŠžĪŻžō▌d┼żŠžĪó╝ė£p╦┘┼żŠžĪó╦▓ķgūŅ┤¾┼żŠžĪóīŹą¦┼żŠžĪŻ
6. ▀xō±±R▀_ÖCąĄ╬╗ų├ĮŌ╬÷Č╚ĪŻ
7. Ė∙ō■ęį╔Ž▀xō±±R▀_ą═╠¢ĪŻ
╦┼Ę■┐žųŲĄ─æ¬ė├
▓Į▀M┐žųŲ
▓Į▀MļŖÖCĄ─╣żū„įŁ└Ē
▓Į▀MļŖÖC╩Ūę╗ĘNīóļŖ├}ø_▐D╗»×ķĮŪ╬╗ęŲĄ─ł╠ąąÖCśŗĪŻ«ö▓Į▀M“īäėŲ„Įė╩šĄĮę╗éĆ├}ø_ą┼╠¢Ż¼╦³Š═“īäė▓Į▀MļŖÖC░┤įOČ©Ą─ĘĮŽ“▐Däėę╗éĆ╣╠Č©Ą─ĮŪČ╚(ĘQ×ķĪ░▓ĮŠÓĮŪĪ▒)Ż¼╦³Ą─ą²▐D╩Ūęį╣╠Č©Ą─ĮŪČ╚ę╗▓Įę╗▓Į▀\ąąĄ─ĪŻ┐╔ęį═©▀^┐žųŲ├}ø_éĆöĄüĒ┐žųŲĮŪ╬╗ęŲ┴┐Ż¼Å─Č°▀_ĄĮ£╩┤_Č©╬╗Ą──┐Ą─Ż╗═¼Ģr┐╔ęį═©▀^┐žųŲ├}ø_Ņl┬╩üĒ┐žųŲļŖÖC▐DäėĄ─╦┘Č╚║═╝ė╦┘Č╚Ż¼Å─Č°▀_ĄĮš{╦┘Ą──┐Ą─ĪŻ▓Į▀MļŖÖC┐╔ęįū„×ķę╗ĘN┐žųŲė├Ą─╠žĘNļŖÖCŻ¼└¹ė├Ųõø]ėąĘe└█š`▓Ņ(Š½Č╚×ķ100%)Ą─╠ž³cŻ¼ÅVĘ║æ¬ė├ė┌Ė„ĘNķ_Łh┐žųŲĪŻ

▓Į▀MļŖÖCĄ─ĘųŅÉ
¼Fį┌▒╚▌^│Żė├Ą─▓Į▀MļŖÖC░³└©Ę┤æ¬╩Į▓Į▀MļŖÖCŻ©VRŻ®Īóė└┤┼╩Į▓Į▀MļŖÖCŻ©PMŻ®Īó╗ņ║Ž╩Į▓Į▀MļŖÖCŻ©HBŻ®║═å╬ŽÓ╩Į▓Į▀MļŖÖCĄ╚ĪŻ
Ī±ė└┤┼╩Į▓Į▀MļŖÖCę╗░Ń×ķā╔ŽÓŻ¼▐DŠž║═¾wĘe▌^ąĪŻ¼▓Į▀MĮŪę╗░Ń×ķ7.5Č╚ ╗“15Č╚Ż╗
Ī±Ę┤æ¬╩Į▓Į▀MļŖÖCę╗░Ń×ķ╚²ŽÓŻ¼┐╔īŹ¼F┤¾▐DŠž▌ö│÷Ż¼▓Į▀MĮŪę╗░Ń×ķ1.5Č╚Ż¼Ą½įļ┬Ģ║═š±äėČ╝║▄┤¾ĪŻĘ┤æ¬╩Į▓Į▀MļŖÖCĄ─▐Dūė┤┼┬Ęė╔▄ø┤┼▓─┴ŽųŲ│╔Ż¼Č©ūė╔ŽėąČÓŽÓäŅ┤┼└@ĮMŻ¼└¹ė├┤┼ī¦Ą─ūā╗»«a╔·▐DŠžĪŻ
Ī±╗ņ║Ž╩Į▓Į▀MļŖÖC╩ŪųĖ╗ņ║Ž┴╦ė└┤┼╩Į║═Ę┤æ¬╩ĮĄ─ā׳cĪŻ╦³ėųĘų×ķā╔ŽÓ║═╬ÕŽÓŻ║ā╔ŽÓ▓Į▀MĮŪę╗░Ń×ķ1.8Č╚Č°╬ÕŽÓ▓Į▀MĮŪę╗░Ń×ķ 0.72Č╚ĪŻ▀@ĘN▓Į▀MļŖÖCĄ─æ¬ė├ūŅ×ķÅVĘ║ĪŻ
▓Į▀MļŖÖCŽĄĮy

1. ▓Į▀MļŖÖCĄ─ņoæBųĖś╦ągšZ
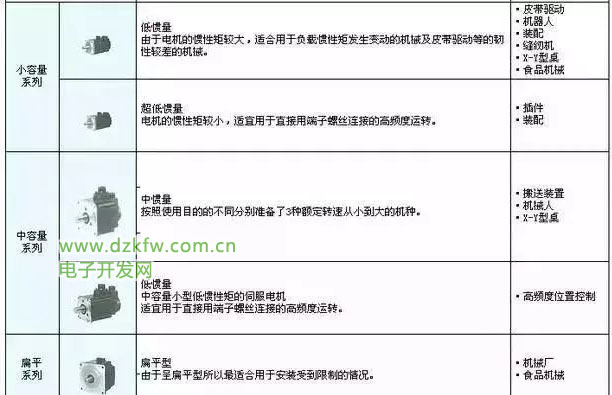
a. ŽÓöĄŻ║«a╔·▓╗═¼ī”śONĪóS┤┼ł÷Ą─╝ż┤┼ŠĆ╚”ī”öĄĪŻ│Żė├m▒Ē╩ŠĪŻ
b.┼─öĄŻ║═Ļ│╔ę╗éĆ┤┼ł÷ų▄Ų┌ąįūā╗»╦∙ąĶ├}ø_öĄ╗“ī¦ļŖĀŅæBė├n▒Ē╩ŠŻ¼╗“ųĖļŖÖC▐D▀^ę╗ éĆ²XŠÓĮŪ╦∙ąĶ├}ø_öĄ ĪŻ
c. ▓ĮŠÓĮŪŻ║ī”æ¬ę╗éĆ├}ø_ą┼╠¢Ż¼ļŖÖC▐Dūė▐D▀^Ą─ĮŪ╬╗ęŲė├”╚▒Ē╩ŠĪŻ
d. Č©╬╗▐DŠžŻ║ļŖÖCį┌▓╗═©ļŖĀŅæBŽ┬Ż¼ļŖÖC▐Dūėūį╔ĒĄ─µiČ©┴”ŠžŻ©ė╔┤┼ł÷²Xą╬Ą─ųC▓©ęį ╝░ÖCąĄš`▓Ņįņ│╔Ą─Ż®ĪŻ
e. ņo▐DŠžŻ║ļŖÖCį┌Ņ~Č©ņoæBļŖū„ė├Ž┬Ż¼ļŖÖC▓╗ū„ą²▐D▀\äėĢrŻ¼ļŖÖC▐D▌SĄ─µiČ©┴”ŠžĪŻ
2. ▓Į▀MļŖÖCäėæBųĖś╦╝░ągšZ
a. ▓ĮŠÓĮŪŠ½Č╚Ż║▓Į▀MļŖÖC├┐▐D▀^ę╗éĆ▓ĮŠÓĮŪĄ─īŹļHųĄ┼c└ĒšōųĄĄ─š`▓ŅĪŻ
b. ╩¦▓ĮŻ║ļŖÖC▀\▐DĢr▀\▐DĄ─▓ĮöĄŻ¼▓╗Ą╚ė┌└Ēšō╔ŽĄ─▓ĮöĄĪŻĘQų«×ķ╩¦▓ĮĪŻ
c. ╩¦š{ĮŪŻ║▐Dūė²X▌SŠĆŲ½ęŲČ©ūė²X▌SŠĆĄ─ĮŪČ╚ ĪŻ
d. ūŅ┤¾┐š▌dŲäėŅl┬╩Ż║ļŖÖCį┌─│ĘN“īäėą╬╩ĮĪóļŖē║╝░Ņ~Č©ļŖ┴„Ž┬Ż¼į┌▓╗╝ėžō▌dĄ─ŪķørŽ┬Ż¼─▄ē“ų▒ĮėŲäėĄ─ūŅ┤¾Ņl┬╩ĪŻ
e. ūŅ┤¾┐š▌dĄ─▀\ąąŅl┬╩Ż║ļŖÖCį┌─│ĘN“īäėą╬╩ĮŻ¼ļŖē║╝░Ņ~Č©ļŖ┴„Ž┬Ż¼ļŖÖC▓╗Ħžō▌dĄ─ūŅĖ▀▐D╦┘Ņl┬╩ĪŻ
f. ▀\ąąŠžŅl╠žąįŻ║ļŖÖCį┌─│ĘN£yįćŚl╝■Ž┬£yĄ├▀\ąąųą▌ö│÷┴”Šž┼cŅl┬╩ĻPŽĄĄ─Ū·ŠĆĘQ×ķ▀\ąąŠžŅl╠žąį ĪŻ
▓Į▀MļŖÖC▀xą═
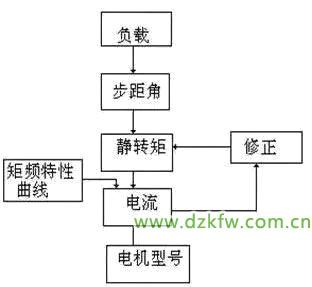
1. ▓ĮŠÓĮŪĄ─▀xō±Ż║ļŖÖCĄ─▓ĮŠÓĮŪ╚ĪøQė┌žō▌dŠ½Č╚Ą─ę¬Ū¾ ĪŻ
2. ņo┴”ŠžĄ─▀xō±Ż║ņo┴”Šž▀xō±Ą─ę└ō■╩ŪļŖÖC╣żū„Ą─žō▌d Ż¼ę╗░ŃŪķørŽ┬Ż¼ņo┴”Šžæ¬×ķ─”▓┴žō▌dĄ─2-3▒Čā╚║├ ĪŻ
3. ļŖ┴„Ą─▀xō±Ż║ė╔ė┌ļŖ┴„ģóöĄ▓╗═¼Ż¼Ųõ▀\ąą╠žąį▓Ņäe║▄┤¾Ż¼┐╔ę└ō■ŠžŅl╠žąįŪ·ŠĆłDŻ¼┼ąöÓļŖÖCĄ─ļŖ┴„ĪŻ
▓Į▀MļŖÖCĄ─ę╗ą®╠ž³c
1. ę╗░Ń▓Į▀MļŖÖCĄ─Š½Č╚×ķ▓Į▀MĮŪĄ─3-5%Ż¼Ūę▓╗└█ĘeĪŻ
2. ▓Į▀MļŖÖC═Ō▒Ēį╩įSĄ─ūŅĖ▀£žČ╚ę╗░Ńį┌öz╩Ž130Č╚ęį╔Ž ĪŻ
3. ▓Į▀MļŖÖCĄ─┴”ŠžĢ■ļS▐D╦┘Ą─╔²Ė▀Č°Ž┬ĮĄĪŻ
4. ▓Į▀MļŖÖCĄ═╦┘Ģr┐╔ęįš²│Ż▀\▐D,Ą½╚¶Ė▀ė┌ ę╗Č©╦┘Č╚Š═¤oĘ©åóäė,▓ó░ķėąć[Įą┬ĢĪŻ
5. ▓Į▀MļŖÖCæ¬ė├ė┌Ą═╦┘ł÷║Ž---├┐ĘųńŖ▐D╦┘▓╗│¼▀^1000▐DĪŻ
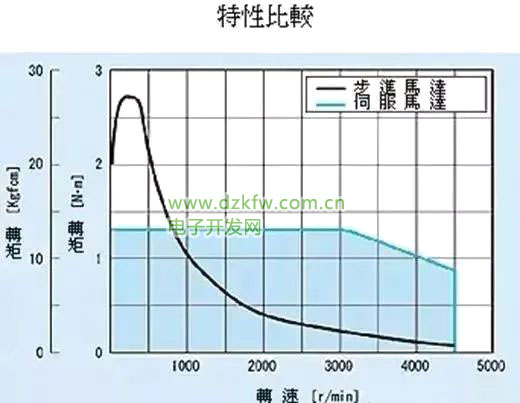
ā╔ĘNļŖÖCų«ąį─▄▒╚▌^
1. ┐žųŲŠ½Č╚▓╗═¼╬ÕŽÓ╗ņ║Ž╩Į▓Į▀MļŖÖC▓ĮŠÓĮŪę╗░Ń×ķ0.72 ĪŃĪó0.36ĪŃĮ╗┴„╦┼Ę■ļŖÖCĄ─┐žųŲŠ½Č╚ė╔ļŖÖC▌S║¾Č╦Ą─ą²▐DŠÄ┤aŲ„▒ŻūC Ż¼ī”ė┌Ħś╦£╩2500ŠĆŠÄ┤aŲ„Ą─ļŖÖCČ°čįŻ¼Ųõ├}ø_«ö┴┐×ķ360ĪŃ/10000=0.036ĪŃŻ¼╦┼Ę■ļŖÖCŠ½Č╚ę¬▒╚▓Į▀M±R▀_Ė▀ĪŻ
2. Ą═Ņl╠žąį▓╗═¼▓Į▀MļŖÖCį┌Ą═╦┘Ģręū│÷¼FĄ═Ņlš±äė¼FŽ¾ĪŻĮ╗┴„╦┼Ę■ļŖÖC▀\▐DĘŪ│ŻŲĮĘĆŻ¼╝┤╩╣į┌Ą═╦┘Ģrę▓▓╗Ģ■│÷¼Fš±äė¼FŽ¾ĪŻ

3. ▀^▌d─▄┴”▓╗═¼▓Į▀MļŖÖCę╗░Ń▓╗Š▀ėą▀^▌d─▄┴”ĪŻĮ╗┴„╦┼Ę■ļŖÖCŠ▀ėą▌^ÅŖĄ─▀^▌d─▄┴” ĪŻ
4. ▀\ąąąį─▄▓╗═¼▓Į▀MļŖÖCĄ─┐žųŲ×ķķ_Łh┐žųŲŻ¼åóäėŅl┬╩▀^Ė▀╗“žō▌d▀^┤¾ęū│÷¼FüG▓Į╗“Č┬▐DĄ─¼FŽ¾Ż¼═Żų╣Ģr▐D╦┘▀^Ė▀ęū│÷¼F▀^ø_Ą─¼FŽ¾Ż¼Į╗┴„╦┼Ę■“īäėŽĄĮy×ķķ]Łh┐žųŲŻ¼“īäėŲ„┐╔ų▒Įėī”ļŖÖCŠÄ┤aŲ„Ę┤üą┼╠¢▀Mąą▓╔śėŻ¼ā╚▓┐śŗ│╔╬╗ų├Łh║═╦┘Č╚ŁhŻ¼ę╗░Ń▓╗Ģ■│÷¼F▓Į▀MļŖÖCĄ─üG▓Į╗“▀^ø_Ą─¼FŽ¾Ż¼┐žųŲąį─▄Ė³×ķ┐╔┐┐ĪŻ
5. ╦┘Č╚Ēææ¬ąį─▄▓╗═¼▓Į▀MļŖÖCÅ─ņoų╣╝ė╦┘ĄĮ╣żū„▐D╦┘Ż©ę╗░Ń×ķ├┐ĘųńŖÄū░┘▐DŻ®ąĶę¬200Ī½400║┴├ļĪŻĮ╗┴„╦┼Ę■ŽĄĮyĄ─╝ė╦┘ąį─▄▌^║├Ż¼ęį╦╔Ž┬MSMA 400WĮ╗┴„╦┼Ę■ļŖÖC×ķ└²Ż¼Å─ņoų╣╝ė╦┘ĄĮŲõŅ~Č©▐D╦┘3000RPMāHąĶÄū║┴├ļŻ¼┐╔ė├ė┌ę¬Ū¾┐ņ╦┘åó═ŻĄ─┐žųŲł÷║Ž
6. ŠžŅl╠žąį▓╗═¼▓Į▀MļŖÖCĄ─▌ö│÷┴”ŠžļS▐D╦┘╔²Ė▀Č°Ž┬ĮĄŻ¼Ūęį┌▌^Ė▀▐D╦┘ĢrĢ■╝▒äĪŽ┬ĮĄŻ¼Į╗┴„╦┼Ę■ļŖÖC×ķ║Ń┴”Šž▌ö│÷ĪŻ
ŠC╔Ž╦∙╩÷Ż¼Į╗┴„╦┼Ę■ŽĄĮyį┌įSČÓąį─▄ĘĮ├µČ╝ā×ė┌▓Į▀MļŖÖCĪŻĄ½į┌ę╗ą®ę¬Ū¾▓╗Ė▀Ą─ł÷║Žę▓Įø│Żė├▓Į▀MļŖÖCüĒū÷ł╠ąąļŖäėÖCĪŻ╦∙ęįŻ¼į┌┐žųŲŽĄĮyĄ─įOėŗ▀^│╠ųąę¬ŠC║Ž┐╝æ]┐žųŲę¬Ū¾Īó│╔▒ŠĄ╚ČÓĘĮ├µĄ─ę“╦žŻ¼▀xė├▀m«öĄ─┐žųŲļŖÖCĪŻ
ūāŅl┐žųŲ
═©ė├ļŖÖCĮķĮB
╚²ŽÓ╩¾╗\╩ĮĮ╗┴„ļŖÖC╩ŪĖąæ¬ļŖÖCųąūŅ│ŻęŖĄ─ę╗ĘNŻ¼Ųõśŗįņ╝░╠žąį╚ńŽ┬Ż║
Ėąæ¬ļŖÖCĄ─śŗįņ╩ŠęŌłD

ļŖÖCĄ─śŗįņ╩ŠęŌłD
ļŖÖCĄ─╠žąį
ūāŅlŲ„įŁ└Ē┼cśŗ│╔
ūāŅlŲ„╩Ū─▄ē“║åå╬Īóūįė╔ĄžĖ─ūāĮ╗┴„ļŖÖC▐D╦┘Ą─ę╗ĘN┐žųŲčbų├ĪŻĖ─ūāĮ╗┴„ļŖÖC▐D╦┘Ą─ĘĮĘ©╚ńŽ┬ĪŻūāŅlŲ„╩Ū═©▀^Ė─ūāĮ╗┴„ļŖÖCļŖį┤Ņl┬╩īŹ¼Fš{╦┘Ą─Ż║
ūāŅlŲ„Ą─śŗ│╔╚ńŽ┬Ż║
1. ūā┴„Ų„(š¹┴„Ų„)┤¾┴┐╩╣ė├Ą─╩ŪČ■śO╣▄ś“š¹┴„Ų„Ż¼╚ńłD1 ╦∙╩ŠŻ¼╦³░č╣żŅlļŖį┤ūāōQ×ķų▒┴„ļŖį┤ĪŻę▓┐╔ė├ā╔ĮMŠ¦¾w╣▄ūā┴„Ų„śŗ│╔┐╔─µūā┴„Ų„Ż¼ė╔ė┌Ųõ╣”┬╩ĘĮŽ“┐╔─µŻ¼┐╔ęį▀Mąąį┘╔·▀\▐DĪŻ
2. ŲĮ▓©╗ž┬Ęį┌š¹┴„Ų„š¹┴„║¾Ą─ų▒┴„ļŖē║ųąŻ¼║¼ėąļŖį┤6 ▒ČŅl┬╩Ą─├}äėļŖē║Ż¼┤╦═Ō─µūāŲ„«a╔·Ą─├}äėļŖ┴„ę▓╩╣ų▒┴„ļŖē║ūāäėĪŻ×ķ┴╦ęųųŲļŖē║▓©äėŻ¼▓╔ė├ļŖĖą║═ļŖ╚▌╬³╩š├}äėļŖē║(ļŖ┴„)ĪŻčbų├╚▌┴┐ąĪĢrŻ¼╚ń╣¹ļŖį┤║═ų„ļŖ┬Ęśŗ│╔Ų„╝■ėąėÓ┴┐Ż¼┐╔ęį╩Ī╚źļŖĖąŻ¼▓╔ė├║åå╬Ą─ŲĮ▓©╗ž┬ĘĪŻ
3. ─µūāŲ„═¼š¹┴„Ų„ŽÓĘ┤Ż¼─µūāŲ„╩Ūīóų▒┴„╣”┬╩ūāōQ×ķ╦∙ę¬Ū¾Ņl┬╩Ą─Į╗┴„╣”┬╩Ż¼ęį╦∙┤_Č©Ą─Ģrķg╩╣6 éĆķ_ĻPŲ„╝■ī¦═©ĪóĻPöÓŠ═┐╔ęįĄ├ĄĮ3 ŽÓĮ╗┴„▌ö│÷ĪŻ
4. ųŲäė╗ž┬Ę«É▓ĮļŖäėÖCį┌į┘╔·ųŲäėģ^ė“╩╣ė├Ģr(▐D▓Ņ┬╩×ķžō)Ż¼į┘╔·─▄┴┐┤µė┌ŲĮ▓©╗ž┬ĘļŖ╚▌Ų„ųąŻ¼╩╣ų▒┴„ļŖē║╔²Ė▀ĪŻę╗░ŃšfüĒŻ¼ė╔ÖCąĄŽĄĮy(║¼ļŖäėÖC)æT┴┐Ęe└█Ą──▄┴┐▒╚ļŖ╚▌─▄ā”┤µĄ──▄┴┐┤¾Ż¼ąĶę¬┐ņ╦┘ųŲäėĢrŻ¼┐╔ė├┐╔─µūā┴„Ų„Ž“ļŖį┤Ę┤ü╗“įOų├ųŲäė╗ž┬Ę(ķ_ĻP║═ļŖūĶ)░čį┘╔·╣”┬╩Ž¹║─Ą¶Ż¼ęį├Ōų▒┴„ļŖ┬ĘļŖē║╔Ž╔²ĪŻ
ūāŅlŲ„Ą─æ¬ė├─┐Ą─╝░ė├═Š
ūāŅlŲ„║═Į╗┴„ļŖÖCśŗ│╔Ą─┐╔š{╦┘é„äėĘQ×ķūāŅlŲ„é„äėŻ¼Ųõ╣”─▄ė├═Š╚ńŽ┬ĪŻŲõųą┐╔─▄╗ź×ķĻP┬ōŻ¼īŹļH╔Ž¤o├„┤_ĘųŅÉŻ¼┤╦▒ĒāHū„ģó┐╝ĪŻ

 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū