
ę╗ĪóSTL/RET ųĖ┴Ņ
STL ųĖ┴Ņ┐╔ęį╩╣ŠÄ│╠š▀╔·│╔┴„│╠║═╣żū„┼cĒśą“╣”─▄łDĘŪ│ŻĮėĮ³Ą─│╠ą“ĪŻ
STL ųĖ┴ŅĄ─ęŌ┴x×ķ╝ż╗Ņ─│éĆ▓ĮŻ©╝┤ĀŅæBŻ®Ż¼į┌╠▌ą╬łD╔Ž¾w¼F×ķÅ─ų„─ĖŠĆ╔Žę²│÷Ą─ĀŅæBĮė³cĪŻSTL ųĖ┴ŅėąĮ©┴óūė─ĖŠĆĄ─╣”─▄Ż¼Å─Č°╩╣įōĀŅæBĄ─╦∙ėą▓┘ū„Š∙į┌ūė─ĖŠĆ╔Ž▀MąąĪŻ
▓Į▀MĘĄ╗žųĖ┴Ņ RET ╩ŪųĖĀŅæB┴„│╠ĮY╩°Ż¼ė├ė┌ĘĄ╗žų„─ĖŠĆĪŻ
ę╗░Ń FX ŽĄ┴ą plc ▓╔ė├ĀŅæBŲ„ S ŠÄųŲĒś┐ž│╠ą“Ż¼▓ó┼c STL ųĖ┴Ņę╗Ų╩╣ė├ĪŻ
1. Ēśą“╣”─▄łD║═▓Į▀M╠▌ą╬łDų«ķgĄ─▐DōQ
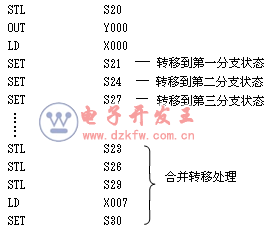
╩╣ė├▓Į▀M╠▌ą╬ųĖ┴Ņ STL ║═▓Į▀MĘĄ╗žųĖ┴Ņ RET ┐╔ęįīóĒśą“╣”─▄łD▐DōQ×ķ▓Į▀M╠▌ą╬łDŻ¼Ųõī”æ¬ĻPŽĄ╚ńŽ┬łD╦∙╩ŠĪŻ
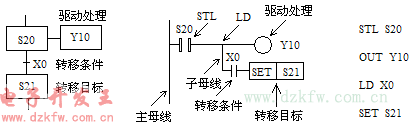
Ż© a Ż® Ēśą“╣”─▄łD Ż© b Ż® ╠▌ą╬łD Ż© c Ż® ųĖ┴Ņ▒Ē
łDĪĪĒśą“╣”─▄łD┼c╠▌ą╬łDĄ─ī”æ¬ĻPŽĄ
ST L ė|³c“īäėĄ─ļŖ┬ĘēKėą 3 éĆ╣”─▄Ż║ó┘ī”žō▌dĄ─“īäė╠Ä└ĒŻ¼╝┤ į┌▀@ę╗▓Įę¬ū÷╩▓├┤Ż╗ ó┌ųĖČ©▐DęŲŚl╝■Ż¼ ╝┤ØMūŃįōŚl╝■ät═╦│÷▀@ę╗▓ĮŻ╗ ó█ųĖČ©▐DęŲ─┐ś╦Ż¼ ╝┤Ž┬ę╗▓ĮĀŅæB╩Ū╩▓├┤ ĪŻ
2. ĪĪ▓Į▀M╠▌ą╬łDŠÄ│╠ęÄät
Ż© 1 Ż®│§╩╝▓Į┐╔ė╔Ųõ╦³▓Į“īäėŻ¼Ą½▀\ąąķ_╩╝Ģr▒žĒÜė├Ųõ╦³ĘĮĘ©ŅAŽ╚ū„║├“īäėŻ¼Ę±ätĀŅæB┴„│╠▓╗┐╔─▄Ž“Ž┬▀MąąĪŻ
Ż© 2 Ż®▓Į▀M╠▌ą╬łDŠÄ│╠Ēśą“×ķŻ║Ž╚▀Mąą“īäėŻ¼║¾▀Mąą▐DęŲĪŻČ■š▀Ą─Ēśą“▓╗─▄ŅŹĄ╣ĪŻ
Ż© 3 Ż®ŠÄ│╠Ģr▒žĒÜ╩╣ė├ STL ųĖ┴Ņī”æ¬ė┌├┐ę╗éĆĒśą“╣”─▄łD╔ŽĄ─▓ĮĪŻ
Ż© 4 Ż®Ė„ STL ė|³cĄ─“īäėļŖ┬Ęę╗░ŃĘ┼į┌ę╗ŲŻ¼ūŅ║¾ę╗éĆ STL ļŖ┬ĘĮY╩°ĢrŻ¼ę╗Č©ę¬╩╣ė├▓Į▀MĘĄ╗žųĖ┴Ņ RET ╩╣ŲõĘĄ╗žų„─ĖŠĆĪŻ
Ż© 5 Ż® STL ė|³c┐╔ęįų▒Įė“īäėę▓┐╔ęį═©▀^äeĄ─ė|³c“īäėŻ¼╚ń Y Īó M Īó S Īó T Īó C Ą╚į¬╝■Ą─ŠĆ╚”║═æ¬ė├ųĖ┴ŅĪŻ
Ż© 6 Ż®“īäėžō▌d╩╣ė├ OUT ųĖ┴ŅŻ¼«ö═¼ę╗žō▌dąĶę¬▀B└mČÓ▓Į“īäėĢr┐╔╩╣ė├ČÓųž▌ö│÷Ż¼ę▓┐╔╩╣ė├ SET ųĖ┴Ņīóžō▌dų├╬╗Ż¼Ą╚ĄĮžō▌d▓╗ąĶꬓīäėĢrį┘ė├ RST ųĖ┴ŅīóŲõÅ═╬╗ĪŻ
Ż© 7 Ż®ė╔ė┌ CPU ų╗ł╠ąą╗Ņäė▓Įī”æ¬Ą─ļŖ┬ĘēKŻ¼ę“┤╦╩╣ė├ STL ųĖ┴ŅĢrį╩įSĪ░ļpŠĆ╚”Ī▒▌ö│÷Ż¼╝┤▓╗═¼Ą─ STL ė|³c┐╔ęįĘųäe“īäė═¼ę╗ŠÄ│╠į¬╝■Ą─ę╗éĆŠĆ╚”ĪŻ
Ż© 8 Ż®┼c STL ė|³cŽÓ▀BĄ─ė|³c╩╣ė├ LD ╗“ LDI ųĖ┴ŅĪŻ
Ż© 9 Ż®į┌▓ĮĄ─╗ŅäėĀŅæBĄ─▐DęŲ▀^│╠ųąŻ¼ŽÓÓÅā╔▓ĮĄ─ĀŅæBŲ„Ģ■═¼Ģr ON ę╗éĆÆ▀├Ķų▄Ų┌Ż¼┤╦Ģr┐╔─▄Ģ■ę²░l╦▓ĢrĄ─ļpŠĆ╚”å¢Ņ}ĪŻ×ķ┴╦▒▄├Ō▓╗─▄═¼ĢrĮė═©Ą─ā╔éĆ▌ö│÷Ż©╚ńŽ┬łD╦∙╩Š┐žųŲļŖäėÖCš²Ę┤▐DĄ─Įėė|Ų„ŠĆ╚”Ż®═¼Ģräėū„Ż¼│²┴╦į┌╠▌ą╬łDųąįOų├▄ø╝■╗źµiļŖ┬Ę═ŌŻ¼▀Ćæ¬į┌ PLC ═Ō▓┐įOų├ė╔│Żķ]ė|³cĮM│╔Ą─ė▓╝■╗źµiļŖ┬ĘĪŻ
łDĪĪš²Ę┤▐DĄ─▄ø╝■╗źµi┐žųŲ
Ż© 10 Ż® SET ųĖ┴Ņ║═ OUT ųĖ┴ŅŠ∙┐╔ęįė├ė┌▓ĮĄ─╗ŅäėĀŅæBĄ─▐DęŲŻ¼┐╔īóįŁüĒ╗Ņäė▓Įī”æ¬Ą─ĀŅæBŲ„Å═╬╗Ż¼īó║¾└m▓Įų├×ķ╗Ņäė▓ĮŻ¼┤╦═Ō▀Ćėąūį▒Ż│ų╣”─▄ĪŻ
(11) ▓óąąą“┴ą║═▀xō±ą“┴ąųąĘųų¦╠ÄĄ─ų¦┬ĘöĄ▓╗─▄│¼▀^ 8 ĪŻ
(12) į┌▐DęŲŚl╝■ī”æ¬Ą─ļŖ┬ĘųąŻ¼▓╗─▄╩╣ė├ ANB Īó ORB Īó MPS Īó MRD Īó MPP ųĖ┴ŅĪŻ
Č■Īóå╬ą“┴ąŠÄ│╠
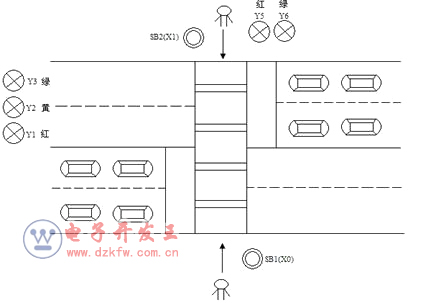
╦═┴ŽąĪ▄ćķ_╩╝Ģr═Żį┌ėęé╚Ž▐╬╗ķ_ĻP X1 ╠ÄŻ¼╚ńŽ┬łD╦∙╩ŠĪŻ░┤Ž┬Ųäė░┤Ōo X3 Ż¼ Y2 ×ķ ON Ż¼┤“ķ_┴ŽČĘĄ─ķlķTŻ¼ķ_╩╝čb┴ŽŻ¼═¼ĢrČ©ĢrŲ„ T0 Č©ĢrŻ¼ 8s ║¾ĻPķ]┴ŽČĘĄ─ķlķTŻ¼ Y2 ūā×ķ OFF Ż¼ Y1 ūā×ķ ON Ż¼ķ_╩╝ū¾ąąĪŻ┼÷ĄĮŽ▐╬╗ķ_ĻP X2 ║¾═ŻŽ┬üĒąČ┴ŽŻ¼ Y1 ūā×ķ OFF Ż¼ Y3 ūā×ķ ON Ż¼═¼ĢrČ©ĢrŲ„ T1 ķ_╩╝Č©ĢrĪŻ 10s ║¾ Y3 ūā×ķ OFF Ż¼ Y0 ūā×ķ ON Ż¼ķ_╩╝ėęąąŻ¼┼÷ĄĮŽ▐╬╗ķ_ĻP X1 ║¾ĘĄ╗ž│§╩╝ĀŅæBŻ¼┤╦Ģr Y0 ūā×ķ OFF Ż¼ąĪ▄ć═Żų╣▀\ąąĪŻ
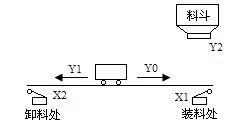
łDĪĪ▀\┴ŽąĪ▄ć╣żū„╩ŠęŌłD
ė╔▀\┴ŽąĪ▄ćĄ─╣ż╦ćę¬Ū¾┐╔ų¬Ż¼▀@╩Ūę╗éĆĒśą“┴„│╠┐žųŲ▀^│╠Ż¼įOėŗŲõĒśą“╣”─▄łDĄ─▓Į¾E╚ńŽ┬Ż║
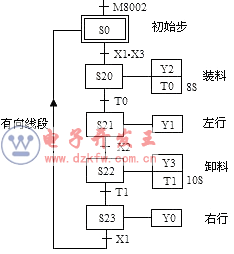
Ż© 1 Ż®īóš¹éĆ╣żū„▀^│╠░┤╣żą“▀MąąĘųĮŌŻ¼├┐éĆ╣żą“ī”æ¬ę╗éĆ▓ĮŻ©╝┤ĀŅæBŻ®Ż¼▓ĮĄ─Ęų┼õ╚ńŽ┬╦∙╩ŠĪŻ
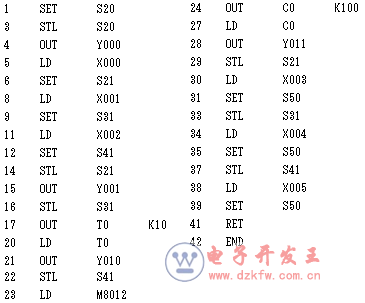
│§╩╝ĀŅæBŻ║ S0 ĪŻ
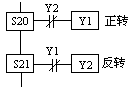
čb┴ŽŻ║ S20 ĪŻ
ū¾ąąŻ║ S21 ĪŻ
ąČ┴ŽŻ║ S22 ĪŻ
ėęąąŻ║ S23 ĪŻ
Å─ęį╔Ž╣żū„▀^│╠Ą─ĘųĮŌ┐╔ęį┐┤│÷Ż¼įō┐žųŲŽĄĮyę╗╣▓ėą 5 ▓ĮĪŻ
Ż© 2 Ż®ī”æ¬ė┌├┐ę╗éĆ▓ĮĄ─äėū„ĪŻ
S0 Ż║¤oäėū„ĪŻ
S20 Ż║“īäė Y2 ×ķ ON Ż¼ąĪ▄ćčb┴ŽŻ¼═¼ĢrŲäėČ©ĢrŲ„ T0 Č©Ģr 8s ĪŻ
S21 Ż║“īäė Y1 ×ķ ON Ż¼ąĪ▄ćķ_╩╝ū¾ąąĪŻ
S22 Ż║“īäė Y3 ×ķ ON Ż¼ąĪ▄ćąČ┴ŽŻ¼═¼ĢrŲäėČ©ĢrŲ„ T1 Č©Ģr 10s ĪŻ
S23 Ż║“īäė Y0 ×ķ ON Ż¼ąĪ▄ćėęąąĪŻ
Ż© 3 Ż®šę│÷├┐éĆ▓ĮĄ─▐DęŲŚl╝■ĪŻ
ė╔╣żū„▀^│╠┐╔ų¬Ż¼├┐ę╗▓ĮĄ─▐DęŲŚl╝■×ķŻ║
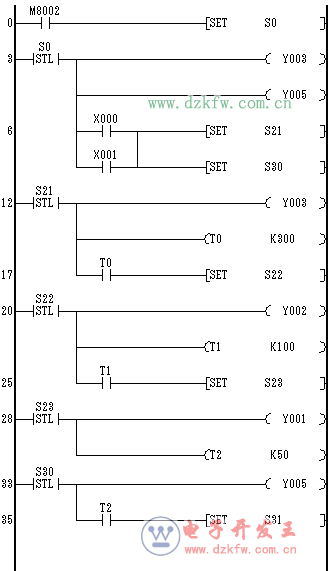
S0 Ż║ PLC ╔ŽļŖų«│§ė╔│§╩╝╗»├}ø_ M8002 Ż©ų╗ķ]║Žę╗éĆÆ▀├Ķų▄Ų┌Ż®ī”Ųõų├╬╗×ķ ON Ż¼×ķęį║¾╗Ņäė▓ĮĄ─▐DęŲū„£╩éõŻ¼į┌╣żū„▀^│╠ųąŻ¼ė╔ėęŽ▐╬╗ī”Ųõų├╬╗×ķ ON ĪŻ
S20 Ż║ąĪ▄ćį┌ėęŽ▐╬╗ X1 ╠Ä▓óŪę░┤Ųäė░┤Ōo X3 Ż¼╝┤ ![]() ĪŻ
ĪŻ
S21 Ż║ T0 Ą─│Żķ_ė|³cĪŻ
S22 Ż║ū¾Ž▐╬╗ X2 ĪŻ
S23 Ż║ T1 Ą─│Żķ_ė|³cĪŻ
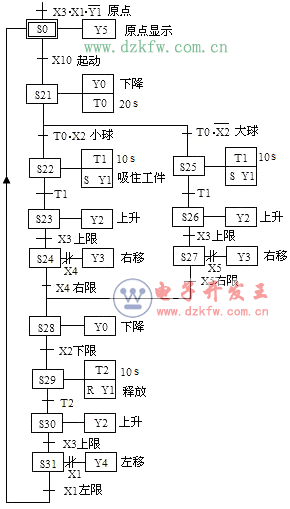
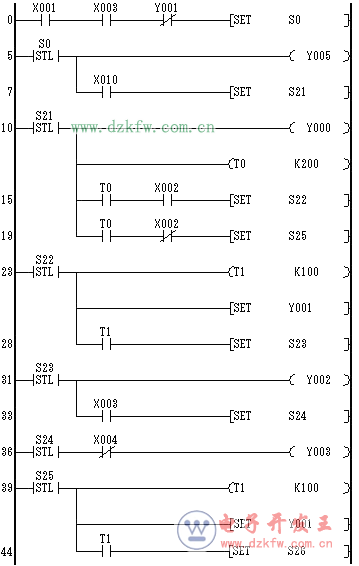
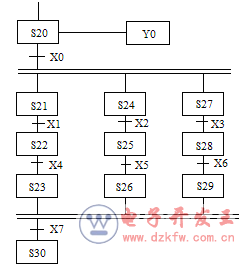
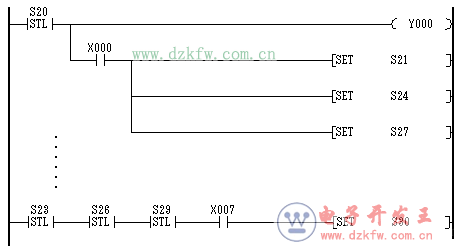
Įø▀^╔Ž╩÷ 3 éĆ▓Į¾EŻ¼Ą├ĄĮĄ─ąĪ▄ć┐žųŲŽĄĮyĄ─Ēśą“╣”─▄łD╚ńŽ┬łD╦∙╩ŠĪŻŽ┬łDŻ© b Ż®║═łDŻ© c Ż®Ęųäe×ķŽÓæ¬Ą─╠▌ą╬łD║═ųĖ┴Ņ▒ĒĪŻ
Ż© a Ż®Ēśą“╣”─▄łD
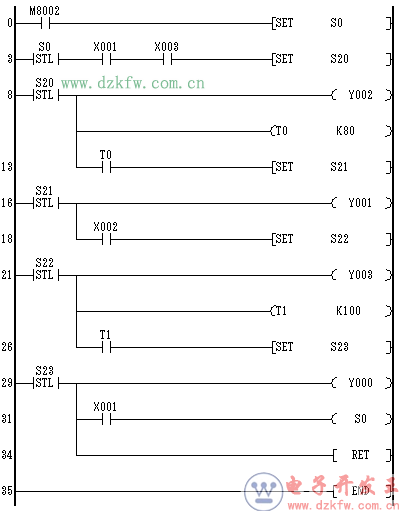
Ż© b Ż®╠▌ą╬łD
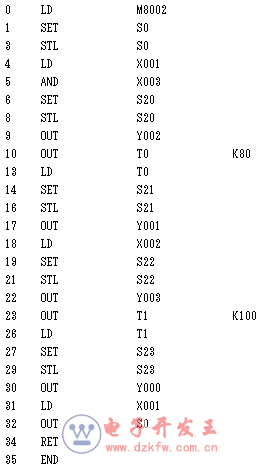
Ż© c Ż®ųĖ┴Ņ▒Ē
łDĪĪå╬ą“┴ąŠÄ│╠
╚²Īó▀xō±ą“┴ąŠÄ│╠
Å─ČÓéĆĘųų¦┴„│╠ųą▀xō±─│ę╗éĆå╬ų¦┴„│╠Ż¼ĘQų«×ķ▀xō±ąįĘųų¦ĪŻ
▀xō±ą“┴ąĄ─Ēśą“╣”─▄łD┼c▓Į▀M╠▌ą╬łDų«ķgĄ─▐DōQŽ┬łDŻ© a Ż®ĪóŻ© b Ż®║═Ż©ŻŃŻ®╦∙╩ŠĪŻ
Ż©ŻßŻ®Ēśą“╣”─▄łD
Ż©ŻŌŻ® ╠▌ą╬łD
Ż©cŻ® ųĖ┴Ņ▒Ē
łD ▀xō±ą“┴ąī”æ¬Ą─╠▌ą╬łD║═ųĖ┴Ņ▒Ē
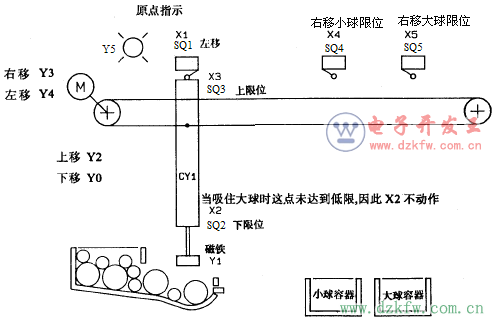
Ž┬łD×ķ╩╣ė├é„╦═Ħīó┤¾ĪóąĪŪ“ĘųŅÉ▀xō±é„╦═Ą─čbų├╩ŠęŌłDĪŻŲõäėū„Ēśą“×ķŽ┬ĮĄĪó╬³╣ż╝■Īó╔Ž╔²ĪóėęęŲĪóŽ┬ĮĄĪóßīĘ┼╣ż╝■Īó╔Ž╔²Īóū¾ęŲĪŻū¾╔Ž×ķįŁ³cŻ¼«öÖCąĄ▒█Ž┬ĮĄŪęļŖ┤┼ĶF╬³ūĪ┤¾Ū“ĢrŻ¼Ž▐╬╗ķ_ĻP SQ2 öÓķ_Ż¼Č°╬³ūĪąĪŪ“Ģr SQ2 Įė═©Ż¼ęį┤╦┼ąöÓ┤¾Ū“╗“ąĪŪ“ĪŻ
ū¾ęŲĪóėęęŲĘųäeė╔ Y4 Īó Y3 ┐žųŲŻ¼╔Ž╔²ĪóŽ┬ĮĄĘųäeė╔ Y2 Īó Y0 ┐žųŲŻ¼īó╣ż╝■╬³ūĪė╔ Y1 ┐žųŲĪŻ«öÖCąĄ▒█ęŲĄĮ╔ŽŽ▐╬╗Īóū¾Ž▐╬╗▓ó╦╔ķ_Ģr×ķįŁ³c╬╗ų├Ż¼╝┤ ![]() Ż¼ Y5 ×ķįŁ³cųĖ╩ŠĪŻ
Ż¼ Y5 ×ķįŁ³cųĖ╩ŠĪŻ
╔ŽŽ▐╬╗Ż║ SQ3 ©D X3
Ž┬Ž▐╬╗Ż║ SQ2 ŻŁ X2
ū¾Ž▐╬╗Ż║ SQ1 ©D X1
ėęęŲąĪŪ“Ž▐╬╗Ż║ SQ4 ©D X4
ėęęŲ┤¾Ū“Ž▐╬╗Ż║ SQ5 ©D X5
łDĪĪ┤¾ĪóąĪŪ“ĘųÆ■╩ŠęŌłD
Ė∙ō■╣ż╦ćę¬Ū¾Ż¼įō┐žųŲ┴„│╠┐╔ę└ō■ SQ2 Ą─ĀŅæBŻ©╝┤ī”æ¬┤¾ĪóąĪŪ“Ż®Ęų│╔ā╔éĆĘųų¦Ż¼╚ńŽ┬łD╦∙╩ŠĪŻ
łDĪĪ┤¾ĪóąĪŪ“ĘųÆ■Ēśą“╣”─▄łD
Ė∙ō■╔ŽłDŻ¼Ą├ĄĮ┤¾ĪóąĪŪ“ĘųÆ■┐žųŲŽĄĮyĄ─▓Į▀M╠▌ą╬łD║═ųĖ┴Ņ▒Ē╚ńŽ┬łDŻ© a Ż®║═Ż© b Ż®╦∙╩ŠĪŻ
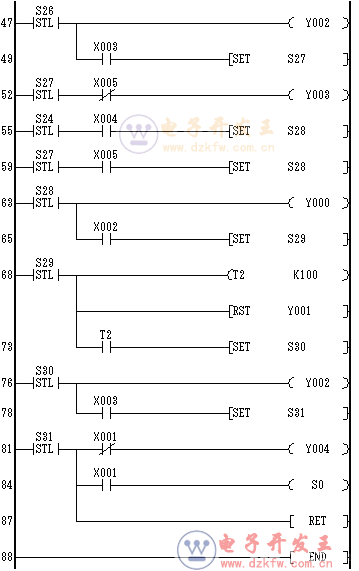
(a) ╠▌ą╬łD
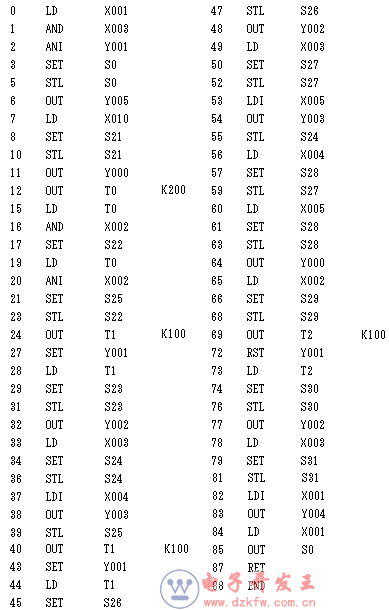
Ż© b Ż®ųĖ┴Ņ▒Ē
łDĪĪ┤¾ĪóąĪŪ“ĘųÆ■ŽĄĮy▓Į▀M╠▌ą╬łD║═ųĖ┴Ņ▒Ē
╦─Īó▓óąąą“┴ąŠÄ│╠
Ž┬łD╦∙╩Š×ķ▓óąąĘųų¦Ą─Ēśą“╣”─▄łDŻ¼▓óąąĘųų¦╩ŪųĖ═¼Ģr╠Ä└ĒĄ─│╠ą“┴„│╠ĪŻ
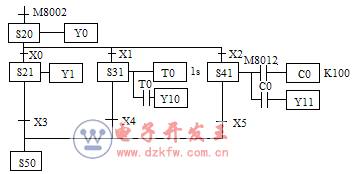
łD ▓óąąą“┴ąĄ─Ēśą“╣”─▄łD
Ųõ╠▌ą╬łD║═ųĖ┴Ņ▒ĒęŖŽ┬łDųąĄ─Ż© a Ż®łD║═Ż© b Ż®łDĪŻ
Ż© a Ż® ╠▌ą╬łD
Ż© b Ż® ųĖ┴Ņ▒Ē
łD ▓óąąą“┴ąī”æ¬Ą─╠▌ą╬łD║═ųĖ┴Ņ▒Ē
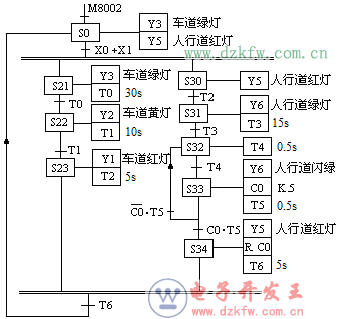
Ž┬łD╦∙╩Š×ķ░┤Ōo╩Į╚╦ąąĄ└╝tĪóŠG¤¶Į╗═©╣▄└ĒŲ„Ż¼╦³╩Ūę╗éĆ▓óąąĘųų¦┼cģR║Žą“┴ąĪŻ
łD ░┤Ōo╩Į╚╦ąąĄ└Į╗═©¤¶╩ŠęŌłD
š²│ŻŪķørŽ┬Ż¼Ų¹▄ć═©ąąŻ¼╝┤ Y3 ŠG¤¶┴┴Īó Y5 ╝t¤¶┴┴Ż╗«öąą╚╦ąĶę¬▀^±R┬ĘĢrŻ¼ät░┤Ž┬░┤Ōo X0 Ż©╗“ X1 Ż®Ż¼ 30s ║¾ų„Ė╔Ą└Į╗═©¤¶Ą─ūā╗»×ķŠGĪ·³SĪ·╝tŻ©Ųõųą³S¤¶┴┴ 10s Ż®Ż¼«öų„Ė╔Ą└╝t¤¶┴┴ĢrŻ¼╚╦ąąĄ└Å─╝t¤¶▐D│╔ŠG¤¶┴┴Ż¼ 15s ║¾╚╦ąąĄ└ŠG¤¶ķ_╩╝ķWę½Ż¼ķWę½ 5 ┤╬║¾▐D╚ļų„Ė╔Ą└ŠG¤¶┴┴Ż¼╚╦ąąĄ└╝t¤¶┴┴ĪŻ
Ž┬łD╩Ū╚╦ąąĄ└Į╗═©¤¶Ą─Ēśą“╣”─▄łDŻ¼įōłD╝╚ėą▓óąąĘųų¦Ż¼ėųėą▀xō±Ęųų¦ĪŻ
łD ╚╦ąąĄ└Į╗═©¤¶Ēśą“╣”─▄łD
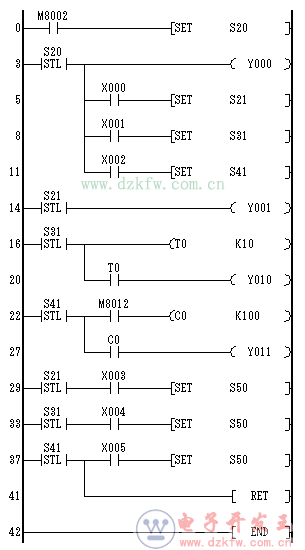
Ųõ▓Į▀M╠▌ą╬łD║═ųĖ┴Ņ▒ĒĘųäeęŖŽ┬łDŻ© a Ż®║═Ż© b Ż®ĪŻ
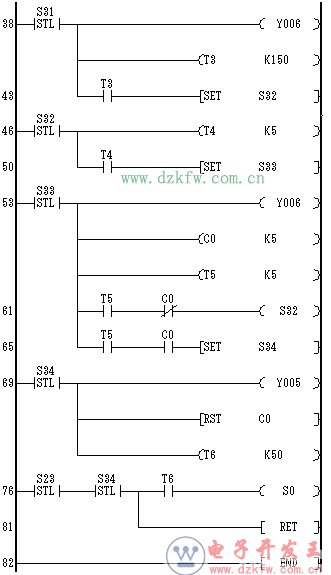
Ż© a Ż®╠▌ą╬łD
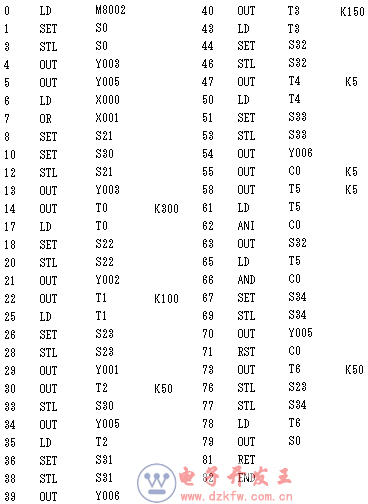
Ż© b Ż®ųĖ┴Ņ▒Ē
łD ╚╦ąąĄ└Į╗═©¤¶Ą─▓Į▀M╠▌ą╬łD║═ųĖ┴Ņ▒Ē
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū