
▒ŖČÓæ¬ė├░Ė└²ųąŻ¼╠ߤƚ¹└Ē│÷ūŅ│ŻęŖĄ─Ų½╬╗įŁę“╝░ī”▓▀Ż¼ė├ęįÄ═ų·įOéõÅS╝ęš{įć╚╦åT┐ņ╦┘Č©╬╗å¢Ņ}Īó▓╔╚ĪĖ„ĘN▀mę╦┤ļ╩®╠ßĖ▀įOéõ┐╣Ė╔ö_ąįĪó×ķįOéõš²┤_ĮėĄž▒ŻūCš²│Ż▀\ąąĪŻ
ęÄ┬╔ąįŲ½╬╗
å¢Ņ}ę╗Ż║ū÷═∙Å═▀\äėŻ¼═∙Ū░įĮŲ½įĮČÓŻ©╔┘Ż®
▷┐╔─▄Ą─įŁę“1Ż║├}ø_«ö┴┐▓╗ī”
å¢Ņ}Ęų╬÷Ż║¤ošō╩Ū═¼▓Į▌åĮYśŗ▀Ć╩Ū²X▌å²XŚlĮYśŗŻ¼Č╝┤µį┌╝ė╣żŠ½Č╚š`▓ŅĪŻ▀\äė┐žųŲ┐©Ż©PLCŻ®▓óø]ėąįOų├£╩┤_Ą─├}ø_«ö┴┐ĪŻ└²╚ń╔Žę╗┼·═¼▓Į▌åļŖÖCą²▐Dę╗╚”įOéõŪ░▀M10mmŻ¼▀@┼·═¼▓Į▌å┤¾ę╗³cļŖÖC▐Dę╗╚”Ū░▀M┴╦10.1mmŻ¼Š═Ģ■ī¦ų┬įō┼·ÖCŲ„├┐┤╬▀\ąą▒╚ęįŪ░Ą─įOéõČÓū▀1%Ą─ŠÓļxĪŻ
ĮŌøQĘĮĘ©Ż║│÷ÖCŪ░ė├ÖCŲ„«ŗę╗éĆ▒M┐╔─▄┤¾Ę∙├µĄ─š²ĘĮą╬Ż¼╚╗║¾ė├│▀╚ź┴┐īŹļH│▀┤ńŻ¼ī”▒╚īŹļH│▀┤ń║═┐žųŲ┐©įOų├│▀┤ńų«ķgĄ─▒╚└²Ż¼╚╗║¾īóŲõ╝ė╚ļ┐žųŲ┐©▀\╦ŃŻ¼Ę┤Å═▀Mąą╚²┤╬ų«║¾Š═Ģ■Ą├ĄĮę╗éĆ▒╚▌^£╩┤_Ą─ųĄĪŻ
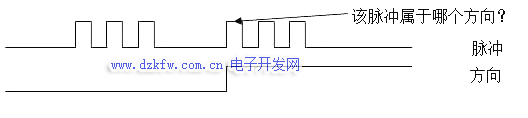
▷┐╔─▄įŁę“2Ż║├}ø_ųĖ┴ŅĄ─ė|░lčž┼cĘĮŽ“ųĖ┴ŅĄ─ļŖŲĮūāōQĢrą“ø_═╗
å¢Ņ}Ęų╬÷Ż║“īäėŲ„ę¬Ū¾╔Ž╬╗ÖC░l│÷Ą─├}ø_ųĖ┴ŅĄ─čž┼cĘĮŽ“ųĖ┴ŅļŖŲĮūāōQėąę╗Č©Ģrą“ę¬Ū¾ĪŻČ°▓┐ĘųPLC╗“▀\äė┐žųŲ┐©ŠÄ│╠Ģrø]ØMūŃ▀@ĘNę¬Ū¾Ż©╗“š▀Ųõūį╔ĒĄ─ęÄät▓╗Ę¹║Ž“īäėŲ„Ą─ę¬Ū¾Ż®Ż¼ī¦ų┬├}ø_║═ĘĮŽ“Ģrą“▓ó▓╗─▄ØMūŃę¬Ū¾Č°Ų½╬╗ĪŻ
ĮŌøQĘĮĘ©Ż║┐žųŲ┐©Ż©PLCŻ®▄ø╝■╣ż│╠ĤīóĘĮŽ“ą┼╠¢╠ßŪ░ĪŻ╗“š▀“īäėŲ„æ¬ė├╝╝ąg╚╦åTĖ³Ė─├}ø_čžėŗöĄĘĮ╩ĮĪŻ
å¢Ņ}Č■Ż║▀\äė▀^│╠ųąļŖÖCį┌╣╠Č©³cČČäėŻ¼▀^įō³c║¾─▄š²│Ż▀\ąąŻ¼Ą½╔┘ū▀ę╗Č╬ŠÓļx
▷┐╔─▄Ą─įŁę“Ż║ÖCąĄčb┼õå¢Ņ}
įŁę“Ęų╬÷Ż║ÖCąĄĮYśŗį┌─│éĆ³cūĶ┴”▌^┤¾ĪŻė╔ė┌ÖCąĄ░▓čbĄ─ŲĮąąČ╚Īó┤╣ų▒Č╚╗“įOėŗ▓╗║Ž└ĒĄ─įŁę“ī¦ų┬įOéõį┌─│éĆ³cūĶ┴”▌^┤¾Ż¼▓Į▀MļŖÖCĄ─┴”Šžūā╗»ęÄ┬╔╩Ū╦┘Č╚įĮ┐ņ┴”ŠžįĮąĪŻ¼║▄╚▌ęūį┌Ė▀╦┘Č╬┐©╦└Ż¼╦┘Č╚ĮĄŽ┬üĒģs─▄ū▀▀^╚źĪŻ
ĮŌøQĘĮĘ©Ż║Öz▓ķÖCąĄĮYśŗ│÷¼F┐©╦└Ą─įŁę“Ż¼╩Ūįō╠Ä─”▓┴ūĶ┴”┤¾▀Ć╩Ū╗¼▄ēčbĄ├▓╗ŲĮąąĄ╚ĪŻ
▓Į▀MļŖÖC┴”Šž▓╗ē“ĪŻė╔ė┌ĮKČ╦┐═æ¶│÷¼F╠ß╦┘╗“š▀╝ė┤¾žō▌dĄ─ę¬Ū¾Ż¼ī¦ų┬įŁ▒Š─▄ØMūŃę¬Ū¾Ą─ļŖÖCį┌Ė▀╦┘┴”Šž▓╗ē“Ż¼Å─Č°░l╔·Ė▀╦┘Č╬Č┬▐DĄ─¼FŽ¾ĪŻĮŌøQĘĮĘ©┐╔ęį═©▀^“īäėŲ„įOų├Ė³┤¾▌ö│÷ļŖ┴„╗“š▀į┌“īäėŲ„į╩įSļŖē║ĘČć·ā╚╠ßĖ▀╣®ļŖļŖē║Ż¼╗“Ė³ōQĖ³┤¾▐DŠžĄ─ļŖÖCĪŻ
å¢Ņ}3Ż║ļŖÖC═∙Å═▀\äėüĒ╗žŠ∙ø]ū▀ĄĮ╬╗ŪęŲ½ęŲ┴┐╣╠Č©
▷┐╔─▄Ą─įŁę“Ż║ŲżÄ¦ķgŽČ
įŁę“Ęų╬÷Ż║ŲżÄ¦┼c═¼▓Į▌åų«ķg┤µį┌Ę┤Ž“ķgŽČī¦ų┬Ż¼═∙╗žū▀Ģ■┤µį┌ę╗Č©┴┐Ą─┐š│╠ĪŻ
ĮŌøQĘĮĘ©Ż║╚ń▀\äė┐žųŲ┐©Š▀ėąŲżÄ¦Ę┤Ž“ķgŽČčaāö╣”─▄Ż¼┐╔└¹ė├ų«Ż╗╗“š▀┐ćŠoŲżÄ¦ĪŻ
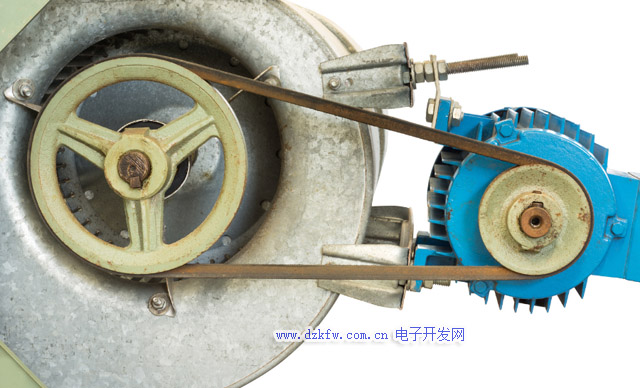
å¢Ņ}4Ż║Ūą└L▄ē█E▓╗ųž║Ž
▷┐╔─▄Ą─įŁę“1Ż║æT┴┐▀^┤¾
įŁę“Ęų╬÷Ż║ŲĮ░ÕŪą└LÖCćŖ─½▀^│╠ė╔╣Ō¢┼┐žųŲŻ¼Æ▀├Ķ╩Į▀\äėŻ¼ŪąĖŅĢrū▀▓Õča▀\äėŻ¼ā╔š▀▄ē█E▓╗ųž║Ž╩Ūę“×ķŻ¼ŅÉ╦ŲįOéõX▌SąĪ▄ćæT┴┐▌^ąĪŪęė╔╣Ō¢┼Č©╬╗Ż¼ćŖ└L╬╗ų├£╩┤_Ż¼Č°Y▌S²łķTĮYśŗæT┴┐▌^┤¾Ż¼ļŖÖCĒææ¬ąį▓ŅŻ¼▓Õča▀\äėĢrY▌SĖ·ļSąį▓╗║├ī¦ų┬▄ē█E▓┐ĘųŲ½╬╗ĪŻ
ĮŌøQĘĮ╩ĮŻ║į÷╝ėY▌S£p╦┘▒╚Ż¼╩╣ė├Ž▌▓©╣”─▄╠ßĖ▀╦┼Ę■“īäėŲ„äéąįęįĮŌøQįōå¢Ņ}ĪŻ
▷┐╔─▄Ą─įŁę“2Ż║ĄČ║═ćŖŅ^ųž║ŽČ╚ø]š{║├
įŁę“Ęų╬÷Ż║ę“×ķŪą└LÖCĄČ║═ćŖŅ^Č╝čbį┌X▌SąĪ▄ć╔ŽĄ½╩Ūā╔š▀ėąū°ś╦▓ŅŻ¼Ūą└LÖC╔Ž╬╗ÖC▄ø╝■─▄š{š¹▀@éĆū°ś╦▓Ņū÷ĄĮĄČ║═ćŖŅ^▄ē█Eųž║ŽŻ¼╚ń╣¹ø]š{║├Ż¼Ūą└L▄ē█EĢ■š¹¾wĘųļxĪŻ
ĮŌøQĘĮĘ©Ż║ą▐Ė─ĄČ║═ćŖŅ^╬╗ų├čaāöģóöĄĪŻ
å¢Ņ}5Ż║«ŗłA│╔ÖEłA
▷┐╔─▄Ą─įŁę“Ż║XY▌SŲĮ┼_ā╔▌S▓╗┤╣ų▒
įŁę“Ęų╬÷Ż║XY▌SĮYśŗŻ¼łDą╬Ų½╬╗└²╚ń«ŗłA│╔ÖEłAŻ¼š²ĘĮą╬Ų½╬╗│╔ŲĮąą╦─▀ģą╬ĪŻ²łķTĮYśŗX▌S┼cY▌S▓╗┤╣ų▒ĢrĢ■ī¦ų┬įōå¢Ņ}ĪŻ
ĮŌøQĘĮĘ©Ż║š{╣زłķT╝▄X▌S┼cY▌S┤╣ų▒Č╚┐╔ęįĮŌøQįōå¢Ņ}ĪŻ

ĘŪęÄ┬╔ąįŲ½╬╗
å¢Ņ}Ż║▀\ąą▀^│╠ųą▓╗Č©Ų┌│÷¼FŲ½╬╗Ż¼Ų½╬╗Š▀ėą┼╝╚╗ąįŻ¼Ų½╬╗ČÓ╔┘▓╗┤_Č©
▷┐╔─▄Ą─įŁę“1:Ė╔ö_įŁę“ī¦ų┬ļŖÖCŲ½╬╗
įŁę“Ęų╬÷Ż║ĘŪų▄Ų┌ąįŲ½╬╗┤¾▓┐Ęųę“×ķĖ╔ö_ī¦ų┬Ż¼╔┘▓┐Ęųę“×ķ▀\äė┐žųŲ┐©░l│÷Ą─šŁ├}ø_╗“š▀ÖCąĄĮYśŗ╦╔äėę²ŲĪŻ
ĮŌøQĘĮĘ©Ż║╚ń╣¹Ė╔ö_│÷¼FĄ─▒╚▌^ŅlĘ▒Ż¼ät┐╔ęį└¹ė├╩Š▓©Ų„▒O┐ž├}ø_Ņl┬╩┤_Č©Ė╔ö_░l╔·Ą─Ģrķg▀MČ°┤_Č©Ė╔ö_į┤Ż¼ęŲ│²╗“š▀╩╣├}ø_ą┼╠¢▀hļxĖ╔ö_į┤─▄ĮŌøQ▓┐ĘųĖ╔ö_ĪŻ╚ń╣¹Ė╔ö_│÷¼FĄ─▒╚▌^┼╝╚╗Ż¼╗“š▀ļyęį┤_Č©Ė╔ö_į┤╬╗ų├╗“ļŖÜŌ╣±ęč╣╠Č©ļyęįęŲäėŻ¼ät┐╔ęį┐╝æ]▓╔ė├ęįŽ┬┤ļ╩®üĒĮŌøQå¢Ņ}Ż║
éõūóŻ║│ŻęŖĄ─Ė╔ö_į┤░³└©ūāē║Ų„ĪóŠĆ╚”╩Į└^ļŖŲ„ĪóūāŅlŲ„ĪóļŖ┤┼ķyĪóĖ▀ē║ļŖŠĆĄ╚ĪŻęÄäØļŖÜŌ╣±Ą─Ģr║“æ¬▒▄├Ōą┼╠¢ŠĆ┐┐Į³▀@ą®Ė╔ö_į┤Ż¼ą┼╠¢ŠĆ┼cĖ▀ē║╣®ļŖŠĆę╦Ęų▓╗═¼ŠĆ▓█▓╝ŠĆĪŻ▷┐╔─▄Ą─įŁę“2Ż║├}ø_┤«│÷¼FšŁ├}ø_
įŁę“Ęų╬÷Ż║┐═æ¶▀\äė┐žųŲ┐©░l╦═├}ø_┤«š╝┐š▒╚▌^ąĪ╗“▀^┤¾Ż¼│÷¼FšŁ├}ø_Ż¼“īäėŲ„ūRäe▓╗┴╦Ż¼ī¦ų┬Ų½╬╗ĪŻ
ĮŌøQĘĮĘ©Ż║▓ķšę┐žųŲŲ„│÷¼F▀@ĘNå¢Ņ}Ą─įŁę“Ż¼╩Ū├}ø_Įė┐┌å¢Ņ}Ż¼▀Ć╩Ū▄ø╝■╦ŃĘ©å¢Ņ}ĪŻ
▷┐╔─▄Ą─įŁę“3Ż║ÖCąĄĮYśŗ╦╔äė
įŁę“Ęų╬÷Ż║▀B▌SŲ„Īó═¼▓Į▌åĪó£p╦┘ÖCĄ╚ė├ĒöĮz╣╠Č©╗“┬▌ĮzŖAŠoĄ─▀BĮė╝■į┌┐ņ╦┘ø_ō¶ł÷║Ž▀\ąąę╗Č╬Ģrķg┐╔─▄│÷¼F╦╔äėŻ¼ī¦ų┬Ų½╬╗ĪŻė├µI║═µI▓█┼õ║Ž╣╠Č©Ą─═¼▓Į▌åätūóęŌµI║═µI▓█ų«ķg╩Ūʱ┤µį┌ķgŽČŻ¼²X▌å²XŚlĮYśŗätūóęŌā╔š▀ų«ķgĄ─┼õ║ŽķgŽČĪŻ
ĮŌøQĘĮĘ©Ż║ĻPµI▓┐ĘųĪó╩▄┴”┤¾Ą─ĮYśŗ┬▌Įzę╗Č©ė├ÅŚē|ĪóČ°Ūę┬▌Įz╗“ĒöĮzę╦═┐Ė▓┬▌Įz─zĪŻļŖÖC▌S┼c┬ō▌SŲ„▒M┴┐ė├µI▓█▀BĮėĪŻ
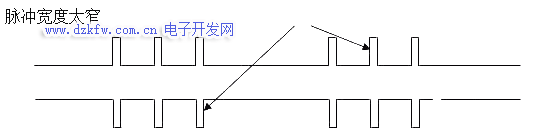
▷┐╔─▄Ą─įŁę“4Ż║×V▓©ļŖ╚▌▀^┤¾
įŁę“Ęų╬÷Ż║×V▓©ļŖ╚▌▀^┤¾Ż¼Ųš═©RC×V▓©Ų„Įžų╣Ņl┬╩╩Ū1/2”ąRCŻ¼ļŖ╚▌įĮ┤¾Įžų╣Ņl┬╩įĮąĪŻ¼ę╗░Ń“īäėŲ„├}ø_Č╦ļŖūĶ×ķ270ÜW─ĘŻ¼103╠š┤╔ļŖ╚▌śŗ│╔Ą─RC×V▓©ļŖ┬ĘĮžų╣Ņl┬╩×ķ54khzŻ¼Ņl┬╩Ė▀ė┌┤╦Ģ■ę“×ķĘ∙ųĄ╦ź£p▀^┤¾Č°ī¦ų┬▓┐Ęųėąą¦ą┼╠¢¤oĘ©▒╗“īäėŲ„š²┤_Öz£yĄĮŻ¼ūŅĮKī¦ų┬Ų½╬╗ĪŻ
ĮŌøQĘĮĘ©Ż║╝ė×V▓©ļŖ╚▌ĢrąĶę¬║╦╦Ń├}ø_Ņl┬╩Īóę╗Č©ę¬▒ŻūCūŅ┤¾═©▀^├}ø_Ņl┬╩ØMūŃę¬Ū¾ĪŻ

▷┐╔─▄Ą─įŁę“5Ż║PLC╗“š▀▀\äė┐žųŲ┐©ūŅ┤¾├}ø_Ņl┬╩▓╗ē“Ė▀
įŁę“Ęų╬÷Ż║ę╗░ŃPLCį╩įS▌ö│÷ūŅ┤¾├}ø_Ņl┬╩×ķ100kHzŻ¼▀\äė┐žųŲ┐©Ė∙ō■Ųõ░l├}ø_ąŠŲ¼▓╗ę╗śė▓Ņ«É▌^┤¾Ż¼╠žäe╩ŪŲš═©å╬Ų¼ÖCķ_░lĄ─▀\äė┐žųŲ┐©┐╔─▄Ģ■ę“×ķ├}ø_Ņl┬╩▓╗ē“Ė▀ī¦ų┬Ų½╬╗ĪŻ
ĮŌøQĘĮĘ©Ż║╝┘╚ń╔Ž╬╗ÖCūŅ┤¾├}ø_Ņl┬╩ėąŽ▐Ż¼×ķ┴╦▒ŻūC╦┘Č╚Ż¼┐╔ęį▀m«öĮĄĄ═“īäėŲ„╝ÜĘųŻ¼ęį▒ŻūCļŖÖC▐DĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū