
ų«Ū░╬ęéāųvĮŌ▀^S7-200SMART▀\äė┐žųŲŽ“?q©▒)¦Ą─ĮMæB(t©żi)æ¬(y©®ng)ė├Ż¼ĮMæB(t©żi)║├Ž“?q©▒)¦║¾ūįäė╔·│╔▀\äėūė│╠ą“Ż¼ų╗ąĶš{(di©żo)ė├ī”æ¬(y©®ng)╣”─▄Ą─ūė│╠ą“▀MąąŠÄ│╠╝┤┐╔Ż¼─Ū├┤Į±╠ņ╬ęéāĘųäeīW(xu©”)┴Ģ(x©¬)ę╗Ž┬│Żė├Ą─ūė│╠ą“Ą─æ¬(y©®ng)ė├ĪŻ
1Īó200 SMART▀\äė┐žųŲųĖ┴ŅA(y©┤)XIS0_CTRL Ż¼│§╩╝╗»▀\äė▌SųĖ┴ŅŻ¼ī”├┐éĆ▌S▒žĒÜę¬åóė├ę╗Śl│§╩╝╗»ųĖ┴ŅĪŻČ°Ūęę¬▒ŻūCEN║═MOD_ENę╗ų▒╩ŪĮė═©ĀŅæB(t©żi)Ż©SM0.0Ż®
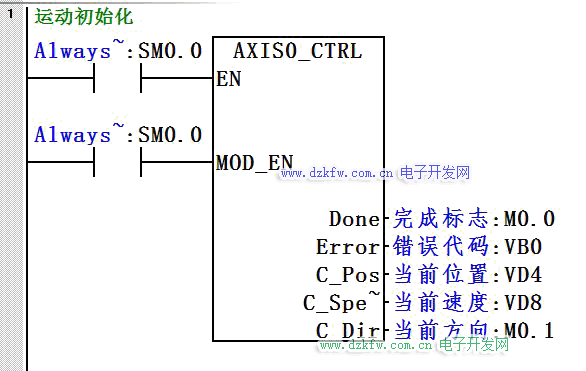
DoneŻ║│§╩╝╗»═Ļ│╔ś╦ųŠŻ¼š²į┌│§╩╝╗»×ķOFFŻ¼═Ļ│╔ätūā│╔×ķONĪŻ
ErrorŻ║’@╩ŠÕeš`┤·┤aŠÄ╠¢Ż¼įöŪķ┤“ķ_Ä═ų·▓ķ┐┤▀\äė▌SÕeš`┤·┤aĪŻ
C_PosŻ║«öŪ░╬╗ų├Ż¼ŽÓī”├}ø_ĘĮ╩ĮĢrå╬╬╗×ķ├}ø_öĄ(sh©┤)Ż¼╣ż│╠å╬╬╗ät×ķmmĄ╚Ż¼Ųõ╦³Ą─ūė└²│╠ųąŅÉ╦ŲŻ¼▓╗ū÷┴Ē═ŌĄ─šf├„ĪŻ
C_SpeedŻ║«öŪ░╦┘Č╚Ż¼ŽÓī”├}ø_Ģrå╬╬╗×ķHZ,╣ż│╠å╬╬╗ät×ķmm/sŻ¼Ųõ╦³ūė└²│╠ųąŅÉ╦ŲŻ¼▓╗ū÷┴Ē═ŌĄ─šf├„ĪŻ
C_Dir:▒Ē╩ŠļŖÖCĄ─«öŪ░ĘĮŽ“ą┼╠¢ĀŅæB(t©żi) Ż¼0 = š²Ž“, ät1 = Ę┤Ž“ĪŻ
2.╩ųäėūė└²│╠Ż¼┐╔ęį╩ųäėęįųĖČ©╦┘Č╚š²Ę┤▐D(zhu©Żn)▀\ąąŻ¼ę▓┐╔ęį░┤ššŽ“?q©▒)¦ĮMæB(t©żi)Ą─JOG╦┘Č╚³cäėš²Ę┤▐D(zhu©Żn)▀\ąąĪŻ
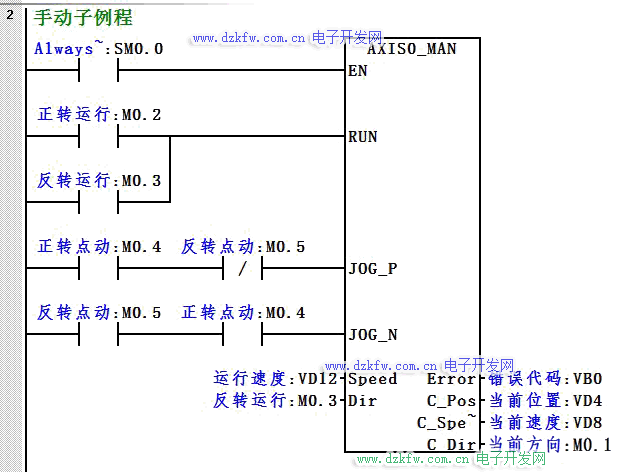
RUN:Įė═©ĢręįSpeedųąųĖČ©Ą─╦┘Č╚▀B└m(x©┤)▀\ąąŻ¼į┌▀\ąą▀^│╠ųąĖ─ūā╦┘Č╚Š═Ģ■┴ó┐╠╔·ą¦Ż¼Įė═©Dir┐╔ęįŪąōQ▀\ąąĘĮŽ“Ż©į┌▀\ąąĢrŪąōQ¤oą¦Ż®ĪŻ
JOG_P:š²▐D(zhu©Żn)³cäėŻ¼╦┘Č╚į┌ęįŽ“?q©▒)¦ųąĮMæB(t©żi)Ą─ļŖÖC³cĄ─äė╦┘Č╚Ż©JOG_SPEEDŻ®ĪŻ
JOU_N:Ę┤▐D(zhu©Żn)³cäėĪŻ
3Īóå╬Č╬Č©┴┐░l(f©Ī)├}ø_ūė└²│╠Ż¼┐╔ęįęįųĖČ©Ą─╦┘Č╚║═öĄ(sh©┤)┴┐üĒ░l(f©Ī)╦═├}ø_Ż¼░l(f©Ī)╦══Ļ│╔║¾╝┤ūįäė═Żų╣ĪŻ
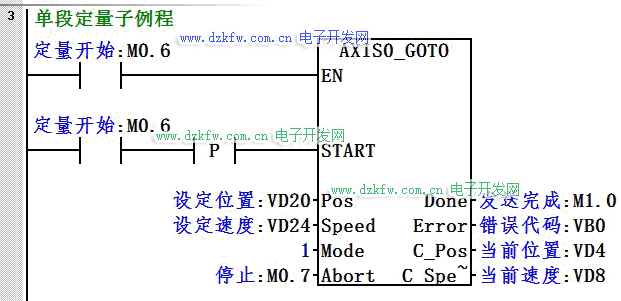
START:ė|░l(f©Ī)ķ_╩╝░l(f©Ī)├}ø_ą┼╠¢Ż¼▒žĒÜį┌▀\äė▌S┐šķeĢr░l(f©Ī)╦═ę╗┤╬ą┼╠¢Ż¼▒žĒÜę¬ė├▀ģčžė|░l(f©Ī)ĪŻ
POSŻ║įO(sh©©)Č©Ą─öĄ(sh©┤)┴┐Ż¼ŽÓī”─Ż╩ĮĢr×ķŠÓļxŻ¼Į^ī”─Ż╩ĮĢr×ķ╬╗ų├ĪŻ
SpeedŻ║įO(sh©©)Č©▀\ąąĄ─╦┘Č╚ĪŻ
ModeŻ║─Ż╩Į▀xō±Ż¼=0Į^ī”Ż¼=1ŽÓī”ĪŻ
Į^ī”Ż║▒žĒÜĮ©┴óę╗éĆģó┐╝³cŻ©┴Ń³cŻ®Ż¼╦∙ėą╬╗ų├Č╝æ¬(y©®ng)įōęįįō³c×ķģó┐╝Ż¼ę¬▀\ąąĄĮ║╬╠ÄŻ¼ų╗ąĶę¬įO(sh©©)Č©įō╠ÄĄ─Į^ī”╬╗ų├ŽĄĮy(t©»ng)ūįäėĖ∙ō■(j©┤)«öŪ░╬╗ų├ūRäeĘĮŽ“║═ąą▀MĄ─ŠÓļxŻ¼įō─Ż╩Į▀m║Žū÷Č©╬╗┐žųŲĪŻ
╚ńŽ┬łDųą«öŪ░╬╗ų├╠Äį┌A╠ÄŻ¼╚ń╣¹įO(sh©©)Č©╬╗ų├×ķ200Ż¼ätūįäėŪ░▀MĄĮ200Ż¼╚ń╣¹įO(sh©©)Č©╬╗ų├×ķ100Ż¼ätūįäė║¾═╦ĄĮ100╠ÄĪŻ

ŽÓī”Ż║ęÓĘQį÷┴┐─Ż╩ĮŻ¼¤oąĶĮ©┴óģó┐╝³cŻ¼├┐┤╬ęį«öŪ░╬╗ų├×ķŲ³cŻ¼▀\ąąę╗éĆŽÓī”ŠÓļxŻ¼▓╗ĘĮ▒Ń▀MąąČ©╬╗┐žųŲĪŻ╚ńŽ┬łD╦∙╩ŠĪŻ

AbortŻ║ė|░l(f©Ī)═Żų╣├³┴ŅŻ¼×ķONĢr├³┴Ņ▀\äė▌S£p╦┘ų▒ų┴═Żų╣ĪŻ
DoneŻ║░l(f©Ī)╦═├}ø_ĮY(ji©”)╩°ś╦ųŠŻ¼š²į┌░l(f©Ī)├}ø_Ģr×ķOFFŻ¼═Żų╣░l(f©Ī)├}ø_Ģr×ķONĪŻųą═Šė╔ė┌Ųõ╦³įŁę“═Żų╣ę▓Ģ■ė|░l(f©Ī)Doneäėū„Ż¼╦∙ęį▓╗ę╗Č©╩Ū▀_ĄĮįO(sh©©)Č©╬╗ų├ĪŻ
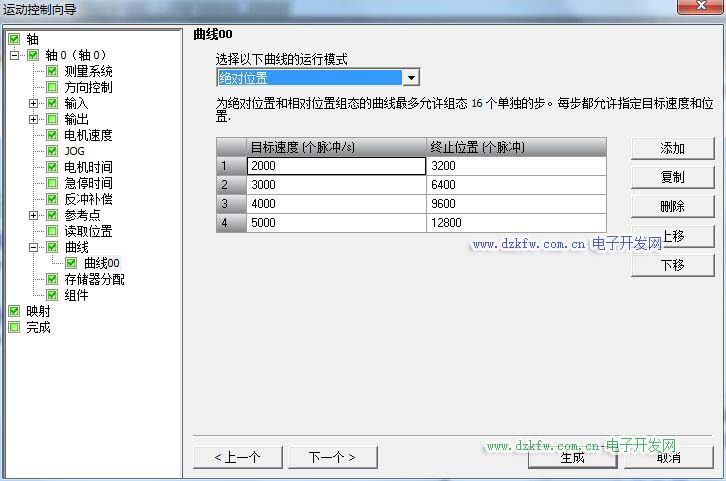
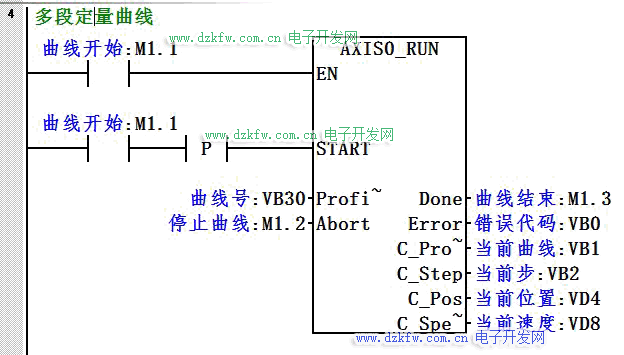
4Ż«ČÓČ╬Č©┴┐Ū·ŠĆ▀\äėĪŻ╠ßŪ░į┌Ž“?q©▒)¦ųąĮMæB(t©żi)║├Ū·ŠĆŻ¼┐╔ęįĮMæB(t©żi)×ķĮ^ī”╗“ŽÓī”Ż¼į┘═©▀^įōųĖ┴Ņš{(di©żo)ė├ĮMæB(t©żi)Ą─Ū·ŠĆ╠¢Ż©Å─0╠¢ķ_╩╝Ż®ĪŻūŅČÓ┐╔ĮMæB(t©żi)32ŚlŪ·ŠĆŻ¼├┐ŚlŪ·ŠĆųą┐╔ęįĮMæB(t©żi)16éĆå╬▓ĮŻ¼├┐éĆå╬▓ĮĄ─ĘĮŽ“▒žĒÜę╗ų┬Ż¼Ę±ätł¾ÕeĪŻ
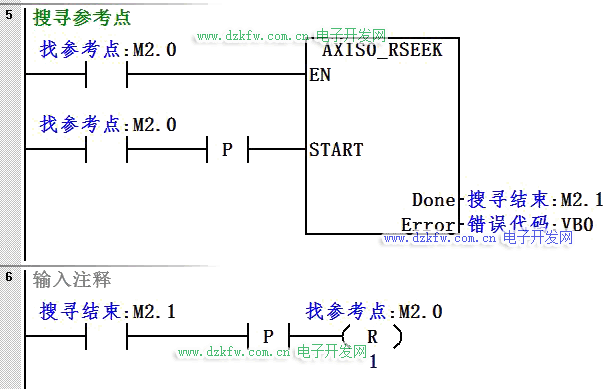
5Īó╦čīżRPSģó┐╝³cĪŻį┌▀MąąĮ^ī”Č©╬╗Ū░Ż¼ąĶę¬Į©┴óģó┐╝³cŻ¼ģó┐╝³cėąā╔ĘNŻ¼ę╗╩Ū┤µį┌RPSą┼╠¢Ą─īŹļHģó┐╝³cŻ¼ę╗╩Ūā╚(n©©i)▓┐Č©┴xĄ─ę╗éĆ╠ōöMģó┐╝³cŻ¼åóė├RSEEKĢ■Ė∙ō■(j©┤)Ž“?q©▒)¦ųąĮMæB(t©żi)Ą─╦čīż╦┘Č╚ĪóĘĮŽ“║═╦čīżĒśą“üĒ╦čīżRPSģó┐╝³cĪŻ
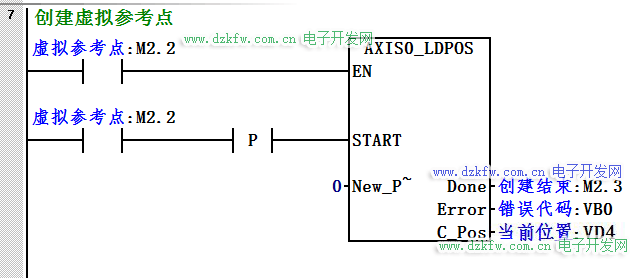
6Īóā╚(n©©i)▓┐äō(chu©żng)Į©╠ōöMģó┐╝³cĪŻ▀mė├ė┌ę╗ą®▓╗ĘĮ▒ŃįO(sh©©)Č©ę╗éĆ╣╠Č©ģó┐╝³cĄ─ł÷║ŽŻ¼åóė├LDPOSĢ■īó«öŪ░╬╗ų├Ė³Ė─│╔ųĖČ©Ą─New_POSŻ¼┐╔ęįĮ©┴ó╠ōöMģó┐╝³c╗“ė├ė┌Ė³Ė─«öŪ░╬╗ų├ĪŻ
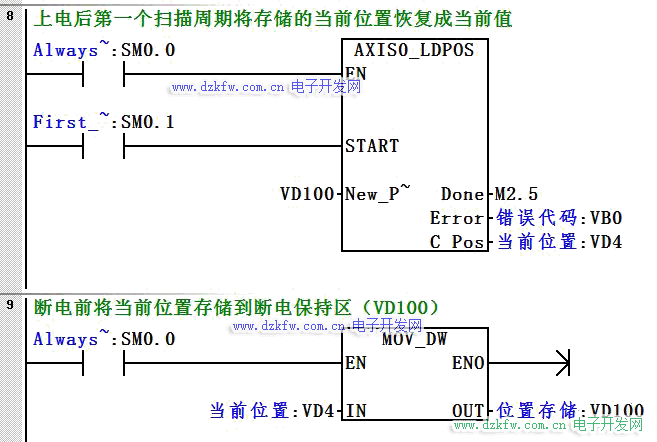
7ĪóįO(sh©©)ų├«öŪ░╬╗ų├öÓļŖ▒Ż│ųĪŻā╔éĆ│╠ą“Č╬▓╗─▄ŅŹĄ╣Ēśą“Ż¼Ę±ätīó¤oĘ©īŹ¼F(xi©żn)ĪŻ
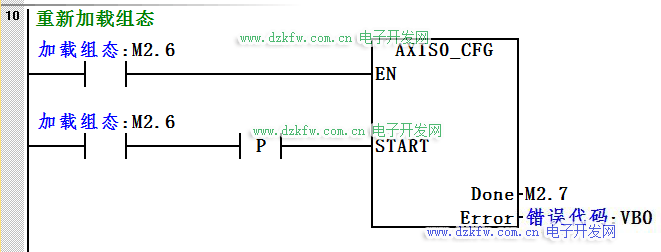
8Īóųžą┬╝ė▌dĮMæB(t©żi)Ż¼ą▐Ė─╚╬║╬ĮMæB(t©żi)ŽÓĻP(gu©Īn)Ą─ģóöĄ(sh©┤)┐╔ė├CFG▀Mąą╦óą┬Ż¼Ę±ät┐╔─▄¤oĘ©╔·ą¦ĪŻ
ęį╔ŽĮķĮB┴╦ę╗Ž┬│Żė├Ą─▀\äėūė└²│╠Ą─╩╣ė├Ż¼─ŃéāČ╝īW(xu©”)Ģ■┴╦å߯┐
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū