
▒Š╣Øų„ę¬░³└©╚ńŽ┬ę╗ą®ā╚╚▌Ż║
1Īó╩▓├┤╩Ū▀\äė┐žųŲŻ©Motion ControlŻ®Ż┐
1Īó╩▓├┤╩Ū▀\äė┐žųŲŻ©Motion ControlŻ®Ż┐
▀\äė┐žųŲŻ©Motion ControlŻ®╩ŪļŖÜŌūįäė╗»┐žųŲĄ─ę╗éĆĘųų¦Ż©│ŻęŖĄ─ļŖÜŌūįäė╗»┐žųŲ░³└©▀^│╠┐žųŲĪó▀\äė┐žųŲĄ╚Ż®Ż¼╦³╩Ū═©▀^┐žųŲ▒╗┐žī”Ž¾Ż©═©│Ż╩Ū▓Į▀MļŖÖC╗“š▀╦┼Ę■ļŖÖCŻ®Ą─╦┘Č╚Īó╬╗ęŲĪó┴”ŠžĄ╚╬’└Ē┴┐Ż¼üĒ═Ļ│╔ųĖČ©Ą─┐žųŲ╚╬äšĪŻ▒╚╚ń╣żśIūįäė╗»ųą╣żū„┼_═∙Å═▀\äėĄ─┐žųŲĪó3D┤“ėĪÖCĄ─┐žųŲĪóöĄ┐žÖC┤▓Ą─┐žųŲĪó╣żśIÖCŲ„╚╦Ą─┐žųŲĄ╚Č╝ī┘ė┌▀\äė┐žųŲĄ─ĘČ«ĀĪŻ
Ė∙ō■┐žųŲĄ─ļyęū│╠Č╚Ą─▓╗═¼Ż¼▀\äė┐žųŲėų┐╔Ęų×ķ═©ė├▀\äė┐žųŲ║═Å═ļs▀\äė┐žųŲĪŻ
"═©ė├▀\äė┐žųŲŻ©General Motion ControlŻ®"╩ŪųĖ▒╗┐žī”Ž¾Ą─▀\äėą╬╩ĮŽÓī”▒╚▌^║åå╬Ż©▒╚╚ń╣żū„┼_Ą─═∙Å═▀\äėŻ®Īó═©│Żų╗ąĶę¬┐žųŲę╗éĆ▌SĪóŲõ▀\äė▄ē█EČÓ×ķų▒ŠĆĄ─▀\äė┐žųŲŻ╗
"Å═ļs▀\äė┐žųŲŻ©Complex Motion ControlŻ®"╩ŪųĖ─Ūą®ąĶę¬┐žųŲČÓéĆ▌Sģfš{▀\äėĄ─Īó▀\äė▄ē█E▒╚▌^Å═ļsĄ─Īóī”▒╗┐žī”Ž¾Ą─╦┘Č╚Īó╬╗ų├Īó┴”ŠžĄ╚╬’└Ē┴┐Š½Č╚ę¬Ū¾▒╚▌^Ė▀Ą─▀\äė┐žųŲŻ©▒╚╚ńöĄ┐žÖC┤▓Īó╣żśIÖCŲ„╚╦Ą─┐žųŲŻ®Ż╗
¤ošō╩Ū═©ė├▀\äė┐žųŲ▀Ć╩ŪÅ═ļs▀\äė┐žųŲŻ¼Č╝╩Ūė╔▀\äė┐žųŲŽĄĮyŻ©Motion Control SystemŻ®═Ļ│╔Ą─ĪŻ
ę╗éĆ═Ļš¹▀\äė┐žųŲŽĄĮy░³└©▀\äė┐žųŲŲ„Īó▓Į▀M“īäėŲ„╗“š▀╦┼Ę■“īäėŲ„Īó▓Į▀MļŖÖC╗“š▀╦┼Ę■ļŖÖCĮM│╔ĪŻė╔ė┌╦┼Ę■ļŖÖC▒Š╔Ē╝»│╔ŠÄ┤aŲ„Ż¼ę“┤╦═©│Żśŗ│╔ķ]Łh┐žųŲŽĄĮyŻ╗Č°▓Į▀MļŖÖC▒Š╔Ēø]ėąŠÄ┤aŲ„Ż¼ę“┤╦ČÓśŗ│╔ķ_Łh┐žųŲŽĄĮyĪŻ«ö╚╗Ż¼▀@ę▓▓╗╩ŪĮ^ī”Ą─ĪŻ┐╔ęį═©▀^į┌▀\äė▌S╔Ž░▓čbŠÄ┤aŲ„Č°╩╣▓Į▀MļŖÖC“īäėĄ─▌Sę▓śŗ│╔ķ]ŁhŽĄĮyĪŻ
Ąõą═Ą─▀\äė┐žųŲŽĄĮy╚ńŽ┬łD╦∙╩ŠŻ║
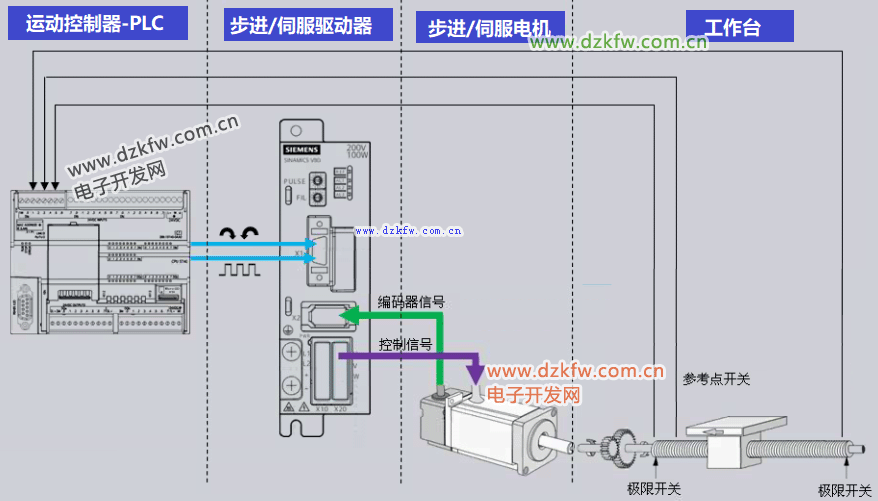
▀\äė┐žųŲŲ„═©▀^░l╦═├}ø_╗“š▀═©ą┼Ą─ĘĮ╩Įīó┐žųŲą┼╠¢░l╦═Įo▓Į▀M“īäėŲ„╗“š▀╦┼Ę■“īäėŲ„Ż¼▓Į▀M“īäėŲ„╗“š▀╦┼Ę■“īäėŲ„į┘Ė∙ō■┐žųŲųĖ┴Ņ“īäė▓Į▀MļŖÖC╗“š▀╦┼Ę■ļŖÖC▀Mąą▀\äėĪŻ
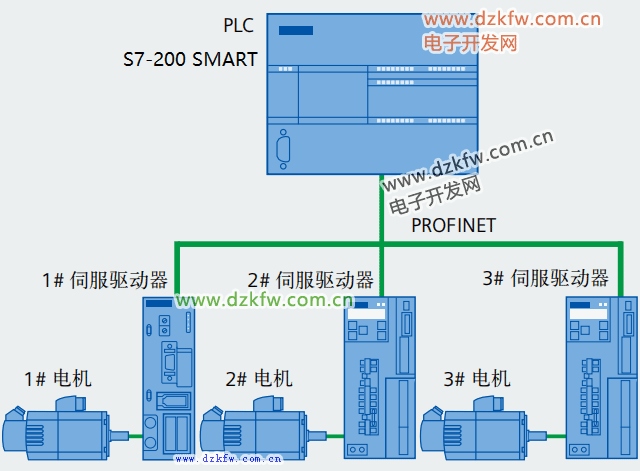
1Ż®Īó═©ą┼Ą─ĘĮ╩ĮŻ║
S7-200 SMARTś╦£╩ą═CPU┐╔ęį═©▀^PROFINET═©ą┼Ą─ĘĮ╩Įīó┐žųŲą┼╠¢░l╦═ĮoSINAMICS V90╦┼Ę■“īäėŲ„Ż©PN░µ▒ŠŻ®Ż¼║¾š▀┐╔ęį┐žųŲ╦┼Ę■ļŖÖC▀Mąą▀\äėŻ╗│²┴╦PROFINETŻ¼Ųõ╦³PLC▀Ćėąų¦│ųModbusĪóCANopenĄ╚═©ą┼ģfūhĄ─░µ▒ŠŻ╗Ž┬├µ▀@ÅłłD╩ŪS7-200 SMART═©▀^PROFINETŠWĮj┐žųŲ╚²┼_╦┼Ę■“īäėŲ„Ą─╩ŠęŌłDŻ║
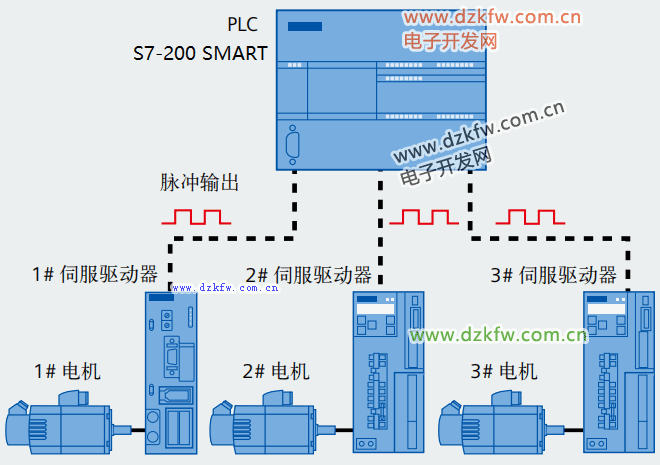
2Ż®Īó├}ø_Ą─ĘĮ╩ĮŻ║
▀\äė┐žųŲŲ„═©▀^░l╦═š╝┐š▒╚×ķ50%Ą─├}ø_ą┼╠¢Įo▓Į▀M/╦┼Ę■“īäėŲ„Ż¼║¾š▀“īäė▓Į▀MļŖÖC╗“š▀╦┼Ę■ļŖÖC▀Mąą▀\äėĪŻĖ∙ō■įOų├Ą─▓╗═¼Ż¼├}ø_ą┼╠¢┐╔ęįėą1┬Ę╗“š▀2┬ĘŻ¼ė├üĒųĖ╩Š▐D╦┘╗“š▀ĘĮŽ“ĪŻ▀@ĘNą┼╠¢▌ö│÷ĘĮ╩Įę▓ĘQ×ķPTOŻ©Pulse Train OutputŻ®Ż¼╝┤"├}ø_┤«▌ö│÷"ĪŻ
SINAMICS V90ėąPTI░µ▒ŠŻ¼▀@└’Ą─PTI╩ŪųĖŻ©Pulse Train InputŻ®Ż¼╝┤"├}ø_┤«▌ö╚ļ"Ż¼ę▓Š═╩Ūšfįō░µ▒ŠĄ─╦┼Ę■“īäėŲ„Įė╩šPTOą┼╠¢ĪŻ
Ž┬├µ▀@ÅłłD╩ŪS7-200 SMART╩╣ė├├}ø_Ą─ĘĮ╩Į┐žųŲ╚²┼_╦┼Ę■“īäėŲ„Ą─╩ŠęŌłDŻ║
ūóęŌŻ║S7-200 SMARTŠ¦¾w╣▄ą═Ą─CPU┐╔ęį▌ö│÷├}ø_┤«Ż©PTOŻ®Ż¼└^ļŖŲ„▌ö│÷ą═▓╗─▄▌ö│÷PTOŻ¼▀xą═Ą─Ģr║“ę¬╝ėęįģ^ĘųŻ╗S7-200 SMARTĖ▀╦┘├}ø_Ą─Ņl┬╩ĘČć·×ķŻ║2Hz~100KHzŻ©╝┤├┐├ļ2éĆ├}ø_ĄĮ├┐├ļ100,000éĆ├}ø_Ż®Ż╗
3ĪóS7-200 SMARTĄ─▀\äė▌S×ķ┴╦ĘĮ▒ŃĄ─▀Mąą▀\äė┐žųŲŻ¼S7-200 SMARTę²╚ļ┴╦▀\äė▌SĄ─Ė┼─ŅĪŻ
▀\äė▌S╩Ūę╗éĆ▀ē▌ŗ╔ŽĄ─Ė┼─ŅŻ¼║åå╬└ĒĮŌŻ¼╦³╩Ūę╗éĆų▒ŠĆą═Ą─Īó░³└©▌ö│÷Ż©ļŖÖCŻ®ą┼╠¢║═▌ö╚ļŻ©Ž▐╬╗Ż®ą┼╠¢Ą─▌SĪŻ
S7-200 SMARTś╦£╩ą═CPUų¦│ų▀\äė┐žųŲ╣”─▄ĪŻŲõųąŻ¼CPU ST20ūŅČÓų¦│ų2éĆ▀\äė▌SŻ╗CPU ST40║═ST60ūŅČÓų¦│ų3éĆ▀\äė▌SŻ╗
├┐éĆ▀\äė▌SČ╝ėą╚²éĆ▌ö│÷ą┼╠¢Ż║P0ĪóP1║═DISą┼╠¢Ż╗
P0║═P1ė├ė┌┐žųŲļŖÖCĄ─╦┘Č╚║═ĘĮŽ“Ż¼ėą╦─ĘN┼õų├ĘĮ╩ĮŻ║å╬ŽÓŻ©2┬Ę├}ø_▌ö│÷Ż®ĪóļpŽÓŻ©2┬Ę├}ø_▌ö│÷Ż®ĪóA/BŽÓ╬╗š²Į╗Ż©2┬Ę├}ø_▌ö│÷Ż®Īóå╬ŽÓŻ©1┬Ę├}ø_▌ö│÷Ż®Ż╗
DISą┼╠¢×ķį┤ą═▌ö│÷Ż¼ė├üĒĮ¹ų╣╗“╩╣─▄▓Į▀M“īäėŲ„╗“╦┼Ę■“īäėŲ„Ż╗
╚²éĆ▀\äė▌SĄ─P0ĪóP1║═DISī”æ¬Ą─▌ö│÷═©Ą└╚ńŽ┬▒ĒŻ║
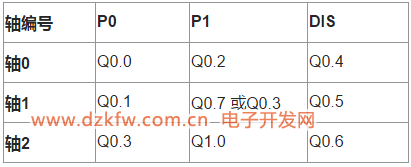
ūóęŌŻ║╚ń╣¹▌S1ĮMæB×ķå╬ŽÓā╔┬Ę▌ö│÷Ż©├}ø_+ĘĮŽ“Ż®Ż¼ätP1Ęų┼õĄĮQ0.7Ż╗╚ń╣¹▌S1ĮMæB×ķļpŽ“▌ö│÷╗“š▀A/BŽÓ▌ö│÷Ż¼ätP1▒╗Ęų┼õĄĮQ0.3Ż¼Ą½┤╦Ģr▌S2īó▓╗─▄╩╣ė├Ż╗
│²┴╦▌ö│÷ą┼╠¢Ż¼├┐éĆ▀\äė▌S▀Ćėąī”æ¬Ą─▌ö╚ļą┼╠¢Ż¼▒╚╚ń╣żū„┼_Ą─ū¾ėęŽ▐╬╗ą┼╠¢Īóģó┐╝³cą┼╠¢Īó┴Ń├}ø_ą┼╠¢Ą╚Ą╚ĪŻŽ┬├µ▀@Åł▒ĒĖ±╩ŪCPU▌ö╚ļ═©Ą└ī”æ¬Ą─▀\äė▌Są┼╠¢Ż║
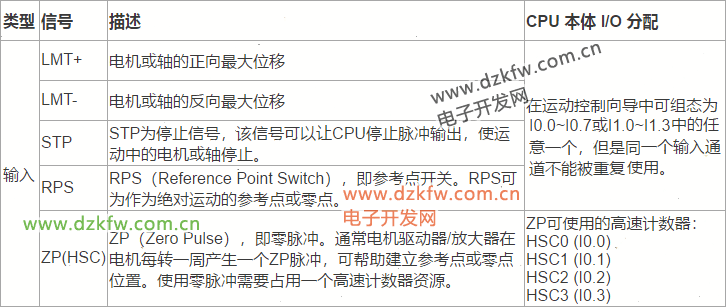
S7-200 SMART╠ß╣®▀\äė┐žųŲŽ“ī¦ī”▀\äė▌S▀MąąĮMæBŻ╗▀\äė▌SĄ─£y┴┐ŽĄĮy┐╔ęį╩Ū╣ż│╠å╬╬╗Ż©▒╚╚ńmmŻ®Ż¼ę▓┐╔ęį╩Ū├}ø_öĄŻ╗ų¦│ųĮ^ī”╬╗ų├ĪóŽÓī”╬╗ų├Ą─▀\äėŻ╗ų¦│ųģó┐╝³c▓ķšęŻ╗╠ß╣®┐╔ĮMæBĄ─Ę┤ø_čaāöŻ╗ūŅČÓų¦│ų32ĮMŪ·ŠĆŻ¼├┐ĮMŪ·ŠĆūŅČÓų¦│ų16 ▓ĮŻ╗╠ß╣®▀\äė┐žųŲ├µ░Õė├ė┌╩ųäėš{įćŻ╗
│²┴╦▀\äė┐žųŲŽ“ī¦Ż¼ę▓┐╔ęį═©▀^PLSųĖ┴ŅüĒ┐žųŲPTOą┼╠¢Ą─▌ö│÷ĪŻ▀@ą®ā╚╚▌īóį┌║¾└m╬─š┬ųąįö╝ÜĮķĮBĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū