
į┌PLCī”Ė„ĘN╣żśIĪó╬’┴„Ą╚╔·«a┴„╦«ŠĆĄ─┐žųŲųąŻ¼│ŻęŖĄ─Łh╣Ø╩Ūī”▓Į▀MļŖäėÖCĄ─┐žųŲĪŻ▓Į▀MļŖäėÖC╩Ūę╗ĘNė├ļŖ├}ø_▀Mąą┐žųŲĪóīóļŖ├}ø_ą┼╠¢▐DōQ×ķŽÓæ¬ĮŪ╬╗ęŲ╗“ŠĆ╬╗ęŲĄ─ķ_Łh┐žųŲį¬╝■ĪŻš²│ŻŪķørŽ┬Ż¼ļŖäėÖCĄ─▐D╦┘Īó═Żų╣Ą─╬╗ų├ų╗╚ĪøQė┌├}ø_ą┼╠¢Ą─Ņl┬╩║═├}ø_öĄŻ¼▓╗╩▄žō▌dūā╗»Ą─ė░ĒæŻ¼«ö▓Į▀MļŖäėÖCĄ─“īäėŲ„Įė╩šĄĮę╗éĆ├}ø_ą┼╠¢ĢrŻ¼“īäėļŖäėÖC░┤ššįOČ©Ą─ĘĮŽ“ą²▐Dę╗éĆ╣╠Č©Ą─ĮŪČ╚Ż¼╝┤▓ĮŠÓĮŪĪŻļŖäėÖCĄ─ą²▐D╩Ūęį╣╠Č©Ą─ĮŪČ╚ų▓Į▀MąąĄ─Ż¼═©▀^┐žųŲ├}ø_öĄ┴┐üĒ┐žųŲĮŪ╬╗ęŲ┴┐Ż¼Å─Č°▀_ĄĮ£╩┤_Č©╬╗Ą──┐Ą─ĪŻ═¼Ģr┐╔ęį═©▀^┐žųŲ├}ø_Ņl┬╩üĒ┐žųŲļŖäėÖC▐DäėĄ─╦┘Č╚║═╝ė╦┘Č╚Ż¼Å─Č°▀_ĄĮš{╦┘Ą──┐Ą─ĪŻ
Š═ę╗éĆé„äė╦┘▒╚┤_Č©Ą─Š▀¾wįOéõČ°čįŻ¼¤oąĶŠÓļxĪó╦┘Č╚ą┼╠¢Ę┤üŁhŻ¼ų╗ąĶ┐žųŲ├}ø_Ą─öĄ┴┐║═Ņl┬╩╝┤┐╔┐žųŲįOéõęŲäė▓┐╝■Ą─ęŲäėŠÓļx║═╦┘Č╚Ż¼Č°ĘĮŽ“ą┼╠¢┐╔┐žųŲęŲäėĄ─ĘĮŽ“ĪŻ┴Ē═ŌŻ¼▓Į▀MļŖÖC┐╔ęįīŹ¼F╝ÜĘų▀\▐DĘĮ╩ĮĪŻę“┤╦Ż¼▒M╣▄▓Į▀MļŖÖCĄ─▓ĮŠÓĮŪ╩▄ÖCąĄųŲįņĄ─Ž▐ųŲ▓╗─▄║▄ąĪŻ¼Ą½┐╔ęį═©▀^ļŖÜŌ┐žųŲĄ─ĘĮ╩Į╩╣▓Į▀MļŖÖCĄ─▀\▐Dė╔įŁüĒĄ─├┐éĆš¹▓Į╝ÜĘų│╔ČÓéĆąĪ▓ĮüĒ═Ļ│╔Ż¼╠ßĖ▀┴╦įOéõ▀\ąąĄ─Š½Č╚║═ŲĮĘĆąįĪŻ
ī”ė┌─Ūą®į┌▀\ąą▀^│╠ųąęŲäėŠÓļx║═╦┘Č╚Š∙┤_Č©Ą─Š▀¾wįOéõŻ¼▓╔ė├PLC═©▀^“īäėŲ„üĒ┐žųŲ▓Į▀MļŖäėÖCĄ─▀\▐D╩Ūę╗ĘN└ĒŽļĄ─╝╝ągĘĮ░ĖĪŻ▒Š╣Øęį╚²ŽÓ┴∙┼─▓Į▀MļŖäėÖCĄ─┐žųŲ×ķ└²Ż¼║åę¬ĮķĮBS7 -200ŽĄ┴ąPLCį┌▓Į▀MļŖäėÖC┐žųŲųąĄ─æ¬ė├ĪŻ
ę╗Īó▓Į▀MļŖäėÖCĄ─╣żū„įŁ└Ē
╚²ŽÓ▓Į▀MļŖäėÖCĄ─ĮYśŗįŁ└Ē╩ŠęŌłD╚ńłD7-32╦∙╩ŠŻ¼«öAŽÓ└@ĮM═©ų▒┴„ļŖ┴„ĢrŻ¼Ė∙ō■ļŖ┤┼īWįŁ└ĒŻ¼▒ŃĢ■į┌AAĘĮŽ“«a╔·┤┼ł÷Ż¼į┌ļŖ┤┼┴”Ą─ū„ė├Ž┬Ż¼╬³ę²▐DūėŻ¼╩╣▐DūėĄ─²X┼cČ©ūėAA┤┼śO╔ŽĄ─²Xī”²RĪŻ╚¶AŽÓöÓļŖĪóBŽÓ═©ļŖŻ¼▀@Ģrą┬Ą─┤┼ł÷ļŖ┤┼┴”ėų╬³ę²▐DūėĄ─ā╔śO┼cBB┤┼śO²Xī”²RŻ¼▐DūėčžĒśĢrßś▐D▀^60ĪŃĪŻ═©│ŻŻ¼▓Į▀MļŖäėÖC└@ĮMĄ─═©öÓļŖĀŅæB├┐Ė─ūāę╗┤╬Ż¼▐Dūė▐D▀^Ą─ĮŪČ╚ĮŪ”┴ĘQ×ķ▓ĮŠÓĮŪĪŻę“┤╦Ż¼łD7-32╦∙╩Š▓Į▀MļŖäėÖCĄ─▓ĮŠÓĮŪ”┴Ą╚ė┌60ĪŃĪŻ╚¶┐žųŲŠĆ┬Ę▓╗═ŻĄž░┤AĪ·BĪ·CĪ·AĪŁĄ─Ēśą“┐žųŲ▓Į▀MļŖäėÖC└@ĮMĄ─═©öÓļŖŻ¼▓Į▀MļŖäėÖCĄ─▐Dūė▒Ń▓╗═ŻĄžĒśĢrßś▐DäėĪŻ╚¶═©ļŖĒśą“Ė─×ķAĪ·CĪ·BĪ·AĪŁŻ¼═¼└ĒŻ¼▓Į▀MļŖäėÖCĄ─▐Dūėīó─µĢrßś▓╗═ŻĄž▐DäėĪŻ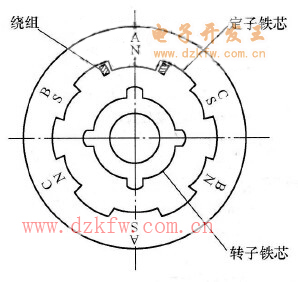
łD7-32 ╚²ŽÓ▓Į▀MļŖäėÖCĄ─ĮYśŗįŁ└ĒłD
╚¶ęį╚²ŽÓ┴∙┼─═©ļŖĘĮ╩Į╣żū„Ż¼«öAŽÓ═©ļŖ▐D×ķAŽÓ║═BŽÓ═¼Ģr═©ļŖĢrŻ¼▐DūėĄ─┤┼śOīó═¼Ģr╩▄ĄĮAŽÓ└@ĮM«a╔·Ą─┤┼ł÷║═BŽÓ└@ĮM«a╔·Ą─┤┼ł÷Ą─╣▓═¼╬³ę²Ż¼▐DūėĄ─┤┼śOų╗║├═Żį┌AŽÓ║═Bā╔ŽÓ┤┼śOų«ķgŻ¼▀@Ģr▓ĮŠÓĮŪ”┴Ą╚ė┌30ĪŃĪŻ«öė╔A║═Bā╔ŽÓ═¼Ģr═©ļŖ▐D×ķBŽÓ═©ļŖĢrŻ¼▐Dūė┤┼śOį┘čžĒśĢrßśą²▐D30ĪŃŻ¼┼cBŽÓ┤┼śOī”²RĪŻŲõėÓęį┤╦ŅÉ═ŲŻ¼╦∙ęį▓╔ė├╚²ŽÓ┴∙┼─═©ļŖĘĮ╩ĮŻ¼┐╔╩╣▓ĮŠÓĮŪ”┴┐sąĪę╗░ļĪŻ
į┌▒Š╣ØųąŻ¼ų„ę¬ųv╩÷PLCī”╚²ŽÓ┴∙┼─▓Į▀MļŖäėÖCĄ─┐žųŲĪŻī”╚²ŽÓ┴∙┼─▓Į▀MļŖäėÖCĄ─┐žųŲŻ¼ų„ę¬ėąā╔éĆĘĮ├µŻ¼╚²ŽÓ└@ĮMĄ─Įė═©┼cöÓķ_Ēśą“ęį╝░ī”▓Į▀M╦┘Č╚Ą─┐žųŲŻ¼Ųõ┐žųŲę¬Ū¾╚ńŽ┬Ż║
(1)░┤Ž┬š²Ž“åóäė░┤ŌoŻ¼▓Į▀MļŖäėÖC░┤AĪ·ABĪ·BĪ·BCĪ·CĪ·CAĪ·AĄ─Ģrą“š²Ž“▐DäėĪŻ
(2)░┤Ž┬Ę┤Ž“åóäė░┤ŌoŻ¼▓Į▀MļŖäėÖC░┤AĪ·ACĪ·CĪ·CBĪ·BĪ·BAĪ·AĄ─Ģrą“Ę┤Ž“▐DäėĪŻ
(3)▀\ąą▀^│╠ųąŻ¼š²/Ę┤▐D┐╔▓╗═ŻĄž▐DōQĪŻ
(4)▓Į▀M╦┘Č╚┬²╦┘×ķ0.5sŻ¼┐ņ╦┘×ķ0.05sŻ¼▓ó┐╔ļSĢr╩ųäėūā╦┘ĪŻ
(5)├┐┤╬åóäėŠ∙Å─AŽÓåóäėĪŻ
Č■Īó▓Į▀MļŖäėÖC┐žųŲŽĄĮyė▓╝■įOėŗ
1Ż«▌ö╚ļ/▌ö│÷ą┼╠¢Ęų╬÷
▓Į▀MļŖäėÖCPLC┐žųŲŽĄĮyĄ─ė▓╝■ĮM│╔╩ŠęŌłD╚ńłD7-33╦∙╩ŠŻ¼ė╔įōĮM│╔╩ŠęŌłD┐╔ų¬Ż¼▓Į▀MļŖäėÖCPLC┐žųŲŽĄĮyĄ─▌ö╚ļą┼╠¢ėąŻ║ļŖäėÖCš²Ž“ĪóĘ┤Ž“║══Żų╣░┤ŌoĖ„1éĆŻ¼┐žųŲŲõ▀\ąą╦┘Č╚Ą─░┤Ōo1éĆŻ¼╣▓ėą4┬Ę▌ö╚ļą┼╠¢Ż¼ąĶ4éĆ▌ö╚ļČ╦ūėĪŻ
łD7-33 ▓Į▀MļŖäėÖC┐žųŲŽĄĮyĄ─ė▓╝■ĮM│╔╩ŠęŌłD
▌ö│÷ą┼╠¢Ż║┐žųŲļŖäėÖC╚²ŽÓ└@ĮMą²▐DĄ─3┬Ęą┼╠¢Ż¼ąĶ3éĆ▌ö│÷Č╦ūėĪŻ
2Ż«PLCĄ─▌ö╚ļ/▌ö│÷Ęų┼õ▒Ē
Ė∙ō■▓Į▀MļŖäėÖCĄ─╣żū„įŁ└Ēęį╝░ŽÓæ¬Ą─┐žųŲę¬Ū¾Ż¼ĮY║ŽłD7-33╦∙╩ŠĄ─ė▓╝■ĮėŠĆ╩ŠęŌłDŻ¼┐╔ų¬įō▓Į▀MļŖäėÖC┐žųŲŽĄĮyųąėą4éĆöĄūų▌ö╚ļ┴┐║═3éĆöĄūų▌ö│÷┴┐Ż¼┐╔įOėŗ╚ń▒Ē7-5╦∙╩ŠĄ─╚²ŽÓ┴∙┼─▓Į▀MļŖäėÖCPLC┐žųŲĄ─▌ö╚ļ▌ö│÷Ęų┼õ▒ĒĪŻ
▒Ē7-5 ŽÓ┴∙┼─▓Į▀MļŖäėÖCPLC┐žųŲĄ─▌ö╚ļ/▌ö│÷Ęų┼õ▒Ē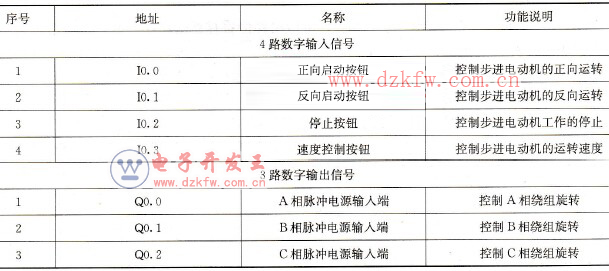
3Ż«PLCĄ─▀xą═
Ė∙ō■▒Ē7-5ųąĄ─▌ö╚ļ/▌ö│÷Č╦ūėöĄŻ¼ģó┐╝Ą┌2š┬▒Ē2-1 S7-200 CPUŽĄ┴ą«aŲĘų„ꬹį─▄ųĖś╦Ż¼▒ŠīŹ└²┐╔ęį▀xė├╬„ķTūė╣½╦ŠS7-200ŽĄ┴ąPLCųąĄ─CPU221ū„×ķ┐žųŲų„ÖCĪŻ
4Ż«PLCĄ─ė▓╝■ĮėŠĆłD
Ė∙ō■PLCĄ─▌ö╚ļ/▌ö│÷Ęų┼õŪķørŻ¼ĮY║ŽłD7-33╦∙╩ŠĄ─PLC┐žųŲŽĄĮyė▓╝■ĮM│╔╩ŠęŌłDŻ¼┐╔ęį«ŗ│÷╚ńłD7-34╦∙╩ŠĄ─PLCų„ÖCĄ─ė▓╝■ĮėŠĆłDĪŻ
╚²Īó▓Į▀MļŖäėÖC┐žųŲŽĄĮy▄ø╝■įOėŗ
Ė∙ō■Š▀¾wĄ─┐žųŲę¬Ū¾Ż¼┐╔ęį«ŗ│÷▓Į▀MļŖäėÖC┐žųŲŽĄĮyĄ─┴„│╠łDŻ¼╚ńłD7-35╦∙╩ŠĪŻ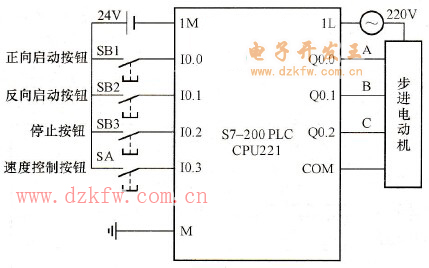
łD7-34 ▓Į▀MļŖäėÖCPLCų„ÖCĄ─ė▓╝■ĮėŠĆłD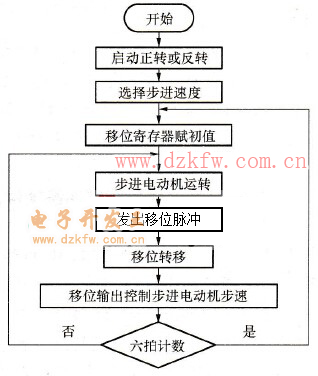
łD7-35 ▓Į▀MļŖäėÖC┐žųŲŽĄĮyĄ─┴„│╠łD
į┌▒Š└²ųąŻ¼▓╔ė├ęŲ╬╗ųĖ┴Ņ▀Mąą▓Į▀M┐žųŲĪŻ╩ūŽ╚ųĖČ©ęŲ╬╗╝─┤µŲ„MB0Ż¼░┤šš╚²ŽÓ┴∙┼─Ą─▓Į▀MĒśą“Ż¼ęŲ╬╗╝─┤µŲ„├┐ū¾ęŲę╗╬╗Ż¼ļŖäėÖCŪ░▀Mę╗éĆ▓ĮŠÓĮŪŻ¼═Ļ│╔┴∙┼─║¾ųžą┬┘x│§ųĄĪŻęŲ╬╗╝─┤µŲ„Ą─│§ųĄ╚ń▒Ē7-6╦∙╩ŠĪŻ
▒Ē7-6 ęŲ╬╗╝─┤µŲ„│§ųĄ
ŲõųąŻ¼M0.6║═M0.7╩╝ĮK×ķĪ░0Ī▒Ż¼ō■┤╦Ż¼┐╔ū÷│÷ęŲ╬╗╝─┤µŲ„▌ö│÷ĀŅæB╝░▓Į▀MļŖäėÖC└@ĮMĄ─ĀŅæBšµųĄ▒ĒŻ¼╚ń▒Ē7-7╦∙╩ŠĪŻ
▒Ē7-7 ęŲ╬╗╝─┤µŲ„▌ö│÷ĀŅæB╝░▓Į▀MļŖäėÖC└@ĮMĄ─ĀŅæBšµųĄ▒Ē

ęįš²▐D×ķ└²ī”▒Ē7-7ųąöĄō■▀MąąĮŌßīĪŻ│§╩╝ĀŅæBĢrŻ¼ęŲ╬╗╝─┤µŲ„╬╗M0.0Ī½M0.5Š∙×ķ0Ż¼▓Į▀MļŖäėÖC╚²ŽÓ└@ĮMĀŅæBŠ∙×ķ0ĪŻ«öĄ┌ę╗éĆ├}ø_ĄĮ▀_║¾Ż¼M0.0╬╗×ķ1Ż¼▓Į▀MļŖäėÖC▐Däėę╗éĆ▓ĮŠÓĮŪŻ¼AŽÓ└@ĮM═©ļŖŻ¼╝┤AŽÓ└@ĮMĀŅæB×ķ1Ż¼ŲõėÓā╔ŽÓ└@ĮMĀŅæB╚į×ķ0ĪŻ«öĄ┌Č■éĆ├}ø_ĄĮ▀_ĢrŻ¼M0.1╬╗×ķ1Ż¼AŽÓ═©ļŖ▐D×ķAŽÓ║═BŽÓ═¼Ģr═©ļŖŻ¼▐DūėĄ─┤┼śO═Żį┌A║═Bā╔ŽÓ┤┼śOų«ķgŻ¼╦∙ęį┤╦ĢrAŽÓ║═BŽÓ└@ĮMĀŅæBŠ∙×ķ1Ż¼CŽÓ└@ĮMĀŅæB╚į×ķ0ĪŻ«öĄ┌╚²éĆ├}ø_ĄĮ▀_ĢrŻ¼M0.2╬╗×ķ1Ż¼▓Į▀MļŖÖCį┘┤╬▐D▀^ę╗éĆ▓ĮŠÓĮŪŻ¼┤╦ĢrBŽÓ└@ĮM═©ļŖŻ¼BŽÓ└@ĮMĀŅæB×ķ1Ż¼AŽÓ║═CŽÓĀŅæB×ķ0ĪŻ«öĄ┌╦─éĆ├}ø_ĄĮ▀_ĢrŻ¼M0.3╬╗×ķ1Ż¼▓Į▀MļŖÖCį┘┤╬▐D▀^ę╗éĆ▓ĮŠÓĮŪŻ¼┤╦ĢrBŽÓ║═CŽÓ└@ĮM═©ļŖŻ¼BĪóCŽÓ└@ĮMĀŅæB×ķ1Ż¼AŽÓĀŅæB×ķ0ĪŻ«öĄ┌5éĆ├}ø_ĄĮ▀_ĢrŻ¼M0.4╬╗×ķ1Ż¼▓Į▀MļŖÖCį┘┤╬▐D▀^ę╗éĆ▓ĮŠÓĮŪŻ¼CŽÓ└@ĮM═©ļŖŻ¼CŽÓĀŅæB×ķ1Ż¼AĪóBŽÓĀŅæB×ķ0ĪŻ«öĄ┌┴∙éĆ├}ø_ĄĮ▀_ĢrŻ¼M0.5╬╗×ķ1Ż¼AŽÓ║═CŽÓ└@ĮM═¼Ģr═©ļŖŻ¼AŽÓĪóCŽÓĀŅæB×ķ1Ż¼BŽÓĀŅæB×ķ0ĪŻų┴┤╦▓Į▀MļŖÖC═Ļ│╔ę╗éĆų▄Ų┌Ą─▀\▐DŻ¼«öŽ┬ę╗éĆ├}ø_▀_ĄĮĢrŻ¼▓Į▀MļŖÖCųžÅ═╔Ž╩÷Ą─▀^│╠ĪŻĘ┤Ž“▀\äėĢrĖ„ŽÓ└@ĮMĄ─ĀŅæB┐╔▀MąąŅÉ╦ŲĄ─Ęų╬÷ĪŻ
▓Į▀MļŖäėÖC┐žųŲŽĄĮyĄ─PLC│╠ą“Ą─╠▌ą╬łDęį╝░šZŠõ▒Ē╚ńłD7-36╦∙╩ŠĪŻ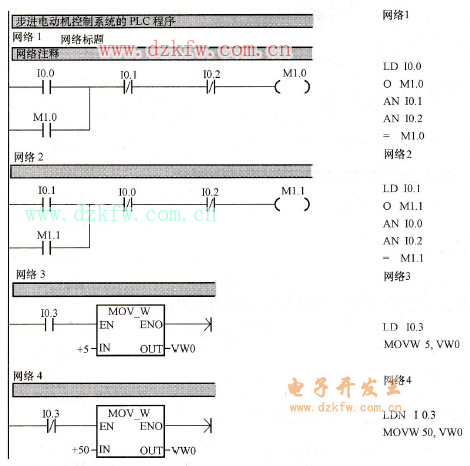
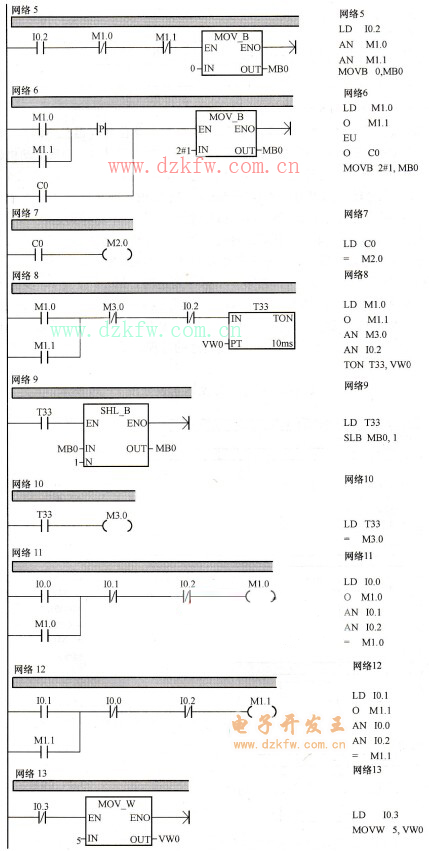
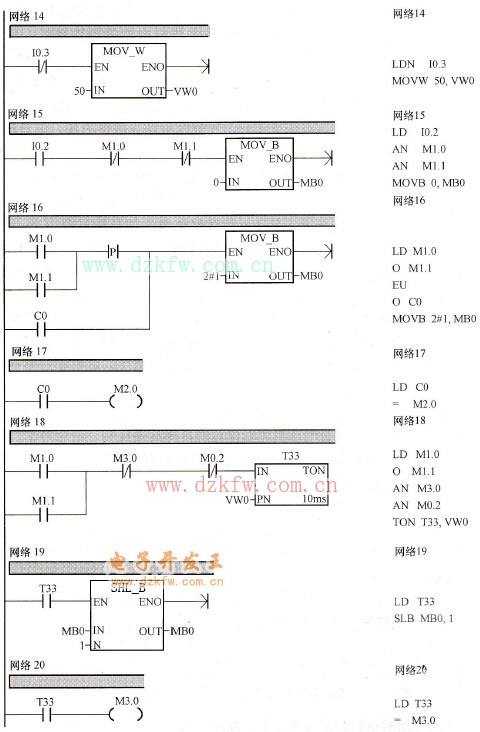
łD7-36 ▓Į▀MļŖäėÖC┐žųŲŽĄĮyĄ─PLC│╠ą“╠▌ą╬łD╝░šZŠõ▒Ē
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū