
ę╗Īóäėū„Ęų╬÷
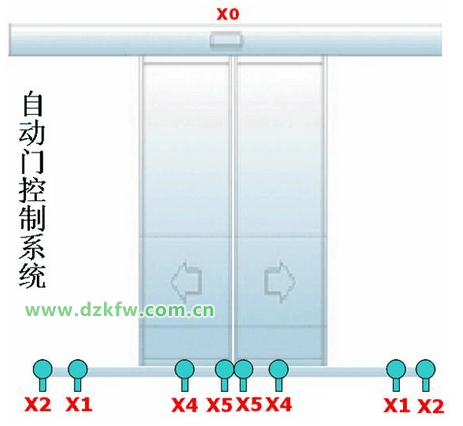
ĪĪĪĪ╚╦┐┐Į³ūįäėķTĢrŻ¼Ėąæ¬Ų„X0×ķONŻ¼Y0“īäėļŖäėÖCĖ▀╦┘ķ_ķTŻ¼┼÷ĄĮķ_ķT£p╦┘ķ_ĻPX1ĢrŻ¼ūā×ķĄ═╦┘ķ_ķTĪŻ┼÷ĄĮķ_ķTśOŽ▐ķ_ĻPX2ĢrļŖäėÖC═Ż▐DŻ¼ķ_╩╝čėĢrĪŻ╚¶į┌0.5sā╚Ėąæ¬Ų„Öz£yĄĮ¤o╚╦Ż¼Y2ŲäėļŖäėÖCĖ▀╦┘ĻPķTĪŻ┼÷ĄĮĻPķT£p╦┘ķ_ĻPX4ĢrŻ¼Ė─×ķĄ═╦┘ĻPķTŻ¼┼÷ĄĮĻPķTśOŽ▐ķ_ĻPX5ĢrļŖäėÖC═Ż▐DĪŻį┌ĻPķTŲ┌ķg╚¶Ėąæ¬Ų„Öz£yĄĮėą╚╦Ż¼═Żų╣ĻPķTŻ¼T1čėĢr0.5s║¾ūįäė▐DōQ×ķĖ▀╦┘ķ_ķTĪŻ
ĪĪĪĪČ■Īóė▓╝■įOėŗ
ĪĪĪĪĖ∙ō■Ū░├µĄ─īW┴ĢŻ¼į┘ę└ō■łDųąĄ─ś╦╩ŠŻ¼═¼īWéā┐╔ęįūį╝║«ŗ│÷▌ö╚ļ╝░▌ö│÷Č╦┐┌Ą─Ęų┼õŻ¼į┌▀@▓╗╝ė╔Ņ╩÷
ĪĪĪĪ╚²ĪóĒśą“╣”─▄łDĄ─└LųŲ
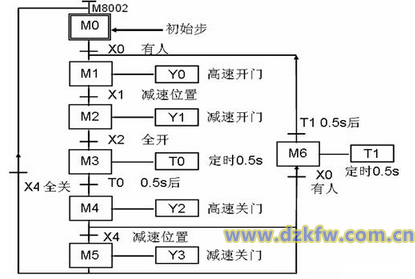
ĪĪĪĪ╦─Īó╚²┴ŌplcūįäėķT┐žųŲŽĄĮyŠÄ│╠╠▌ą╬łD
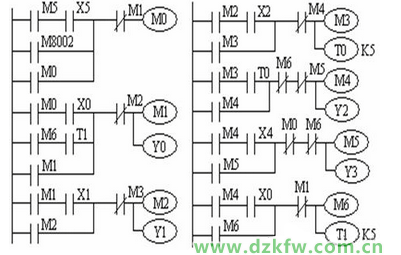
ĪĪĪĪ1Īó▀xō±ą“┴ąŲ-▒Ż-═ŻļŖ┬ĘŠÄ│╠
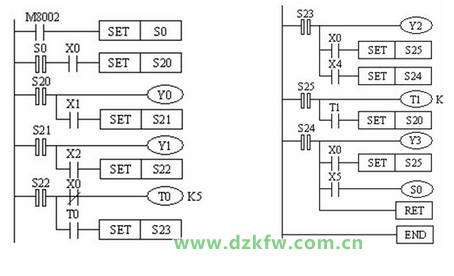
ĪĪĪĪ2Īó▀xō±ą“┴ąĮYśŗĄ─▓Į▀MųĖ┴ŅŠÄ│╠
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū