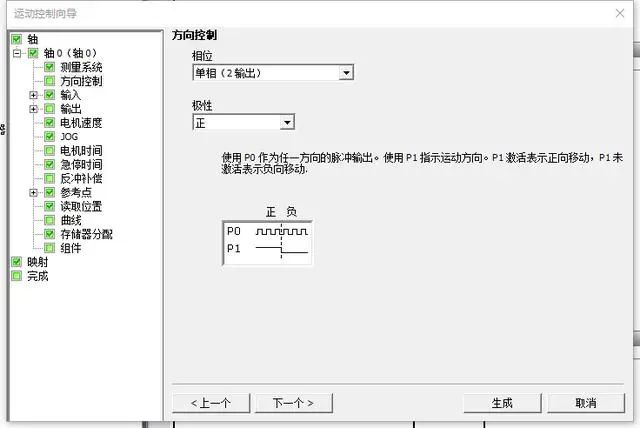
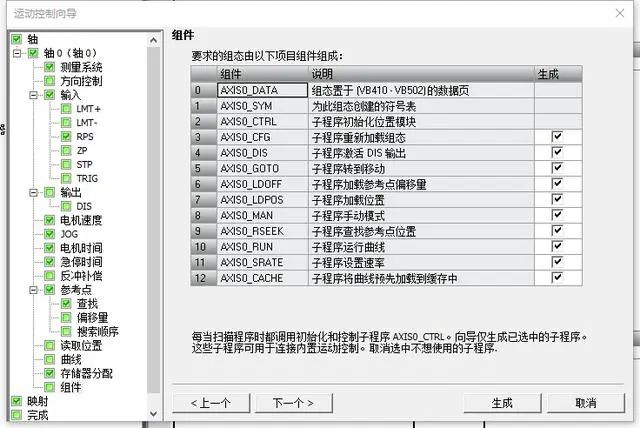
S7-200 smart ▀\äė┐žųŲųĖ┴Ņė╔ŠÄ│╠▄ø╝■Ž“ī¦╔·│╔Ż¼▀\äė┐žųŲųĖ┴Ņėą║▄ČÓŚlśŗ│╔Ż¼Ūę├┐ŚlųĖ┴ŅČ╝Ħėą║▄ČÓĮė┐┌ģóöĄŻ¼Žļę¬╩╣ė├▀@ą®ųĖ┴ŅŻ¼ę¬Ž╚ų¬Ą└Įė┐┌╩Ū╩▓├┤ęŌ╦╝Ż¼ļm╚╗Ä═ų·╬─š┬Č╝ėąĮŌßīŻ¼Ą½ūxČ«Ä═ų·╬─╝■ę▓║▄┘Mä┼Ż¼Į±╠ņŠ═įö╝ÜĮo┤¾╝ęĮķĮB▀\äėųĖ┴ŅĄ─╩╣ė├ĪŻS7-200 SMRAT ▀\äė┐žųŲųĖ┴Ņ╚ńŽ┬łD╔·│╔Ż║1Īó▀xō±"▀\äė"ėęµI┤“ķ_ĪŻ╩╣ė├▄ø╝■×ķSTEP7-MicroWIN SMART
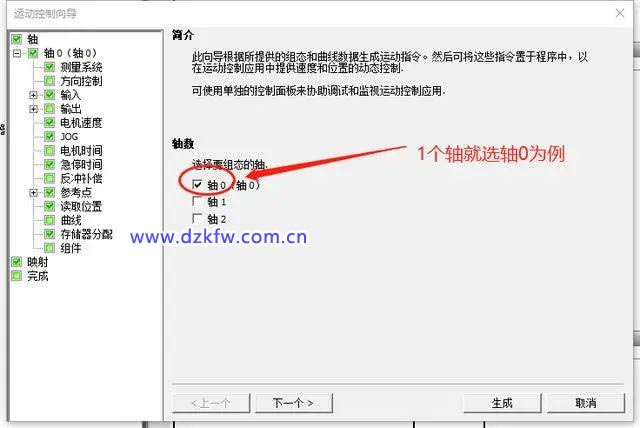
2Īó▒Š┤╬Š═ęį"▌S0"×ķ└²ĪŻ
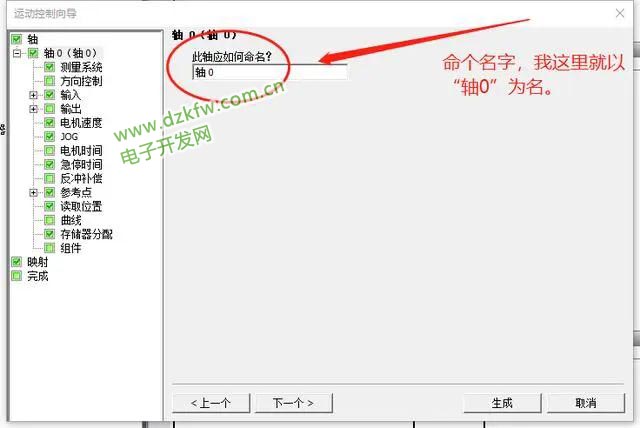
3Īó├³éĆ├¹ūųĪŻ
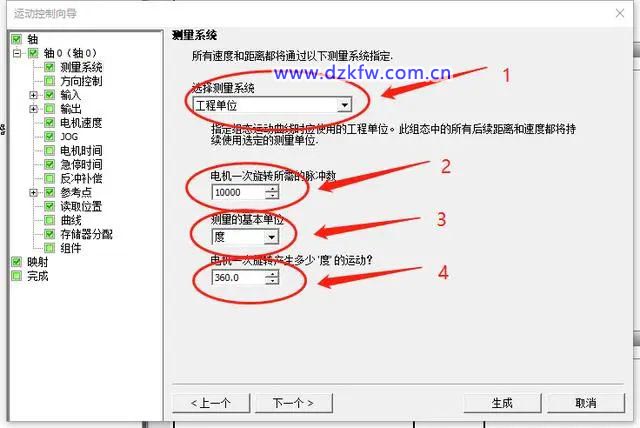
4ĪóöĄūų1╬╗▀xō±╣ż│╠å╬╬╗Ż¼┐╔ęį╩╣╣ż│╠å╬╬╗Ż¼ę▓┐╔ęį╩╣ė├├}ø_ĪŻöĄūų2╩ŪļŖÖCą²▐Dę╗╚”Ą─├}ø_┴┐Ż¼╬ę─┐Ū░▓Į▀Mō▄┤aįOČ©╩Ū10000éĆ├}ø_ą²▐Dę╗ų▄öĄūų3╩Ūå╬╬╗Ż¼Ė∙ō■ūį╝║ąĶę¬įOČ©öĄūų4╩ŪļŖÖCą²▐Dę╗╚”Ą─╣ż│╠┴┐Ż¼╬ęįOČ©Ą─╩Ū360Č╚Ż¼ę▓Š═╩Ūšf10000éĆ├}ø_ī”æ¬360Č╚ĪŻ
5ĪóĘĮŽ“┐žųŲŻ¼╬ę╩Ūė├Ą─├}ø_╝ėĘĮŽ“Ż¼╦∙ęį▀xō±å╬ĒŚ2▌SĪŻ
6Ī󚲞ōśOŽ▐Ė∙ō■ąĶę¬įOČ©Ż¼╬ę▀@éĆø]ėąš²žōśOŽ▐Š═ø]ėą▀xō±ĪŻ


7Īó┴ŃļŖ╬╗╩╣ė├Ż¼ū▀Į^ī”╬╗ų├║═ŽÓī”╬╗ų├ų«Ū░ę╗Č©ę¬Č©┴x║├įŁ³cŻ¼Ę±ätĮ^ī”╬╗ų├║═ŽÓī”╬╗ų├▓╗▀\ąąĪŻ

8Īó0├}ø_╬╗ų├Ż¼ę▓┐╔ęį╩╣ė├┤╦³cČ©┴x0³cĪŻ
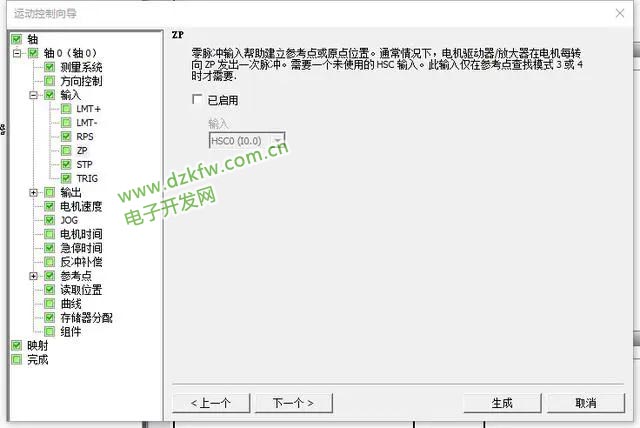
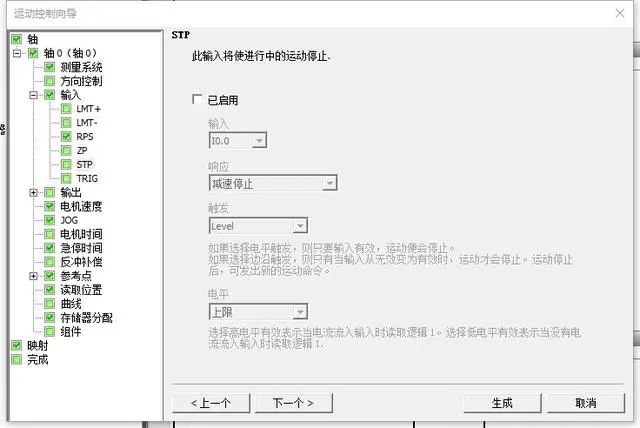
9Īó═Żų╣Ė∙ō■ąĶę¬▀xō±Ż¼═©▀^ķåūxSTPŠ═─▄└ĒĮŌ╩▓├┤ęŌ╦╝ĪŻ
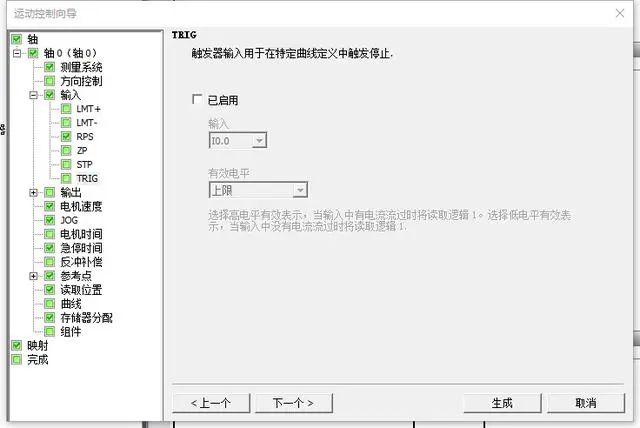
10Īó═Żų╣Ė∙ō■ąĶę¬▀xō±Ż¼═©▀^ķåūxTRIGŠ═─▄└ĒĮŌ╩▓├┤ęŌ╦╝ĪŻ
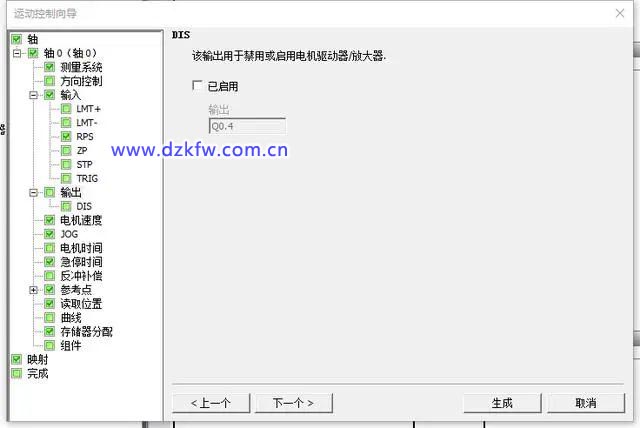
11ĪóĮ¹ė├Ė∙ō■ąĶę¬▀xō±Ż¼═©▀^ķåūxDISŠ═─▄└ĒĮŌ╩▓├┤ęŌ╦╝ĪŻ
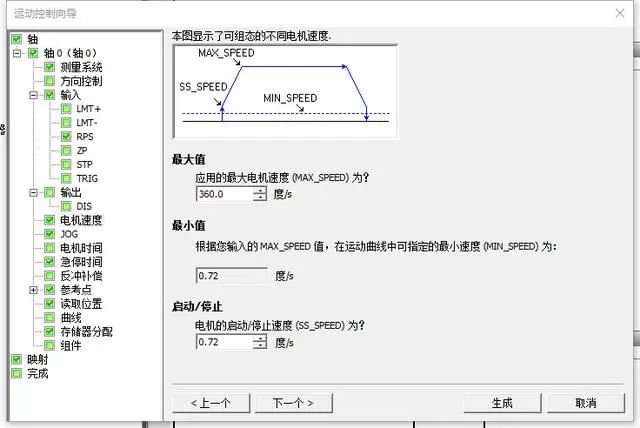
12ĪóūŅ┤¾╦┘Č╚║═ūŅąĪ╦┘Č╚Ė∙ō■¼Fł÷ŪķørįOČ©Ż¼╬ęįOČ©ūŅ┤¾╦┘Č╚×ķ360Č╚/├ļĪŻ
13ĪóJOG├³┴Ņę▓Š═╩Ū╩ųäė▀\ąąŻ¼Ė∙ō■ąĶę¬įOČ©╦┘Č╚Ż¼Į©ūhįOČ©ąĪę╗ą®Ż¼┐┤┐┤▀\ąą╦┘Č╚į┘š{š¹ĪŻ
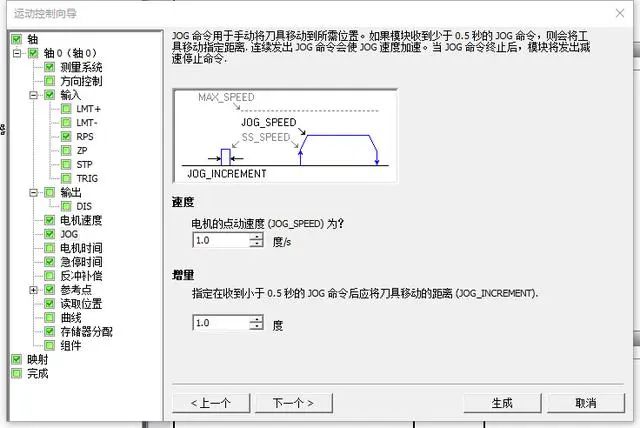
14Īó┤╦╠ÄįOČ©╝ė£p╦┘ĢrķgŻ¼ę▓Š═╩Ū├}ø_▌ö│÷Ą─╝ė£p╦┘ĢrķgŻ¼Ė∙ō■¼Fł÷ŪķørįOČ©ĪŻ
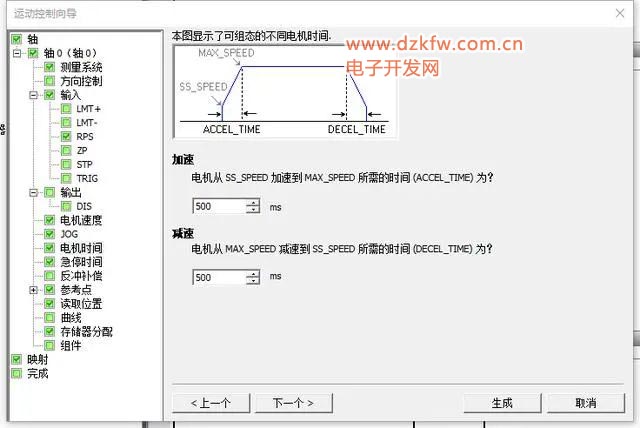
15Īó╝▒═ŻčaāöĪŻ
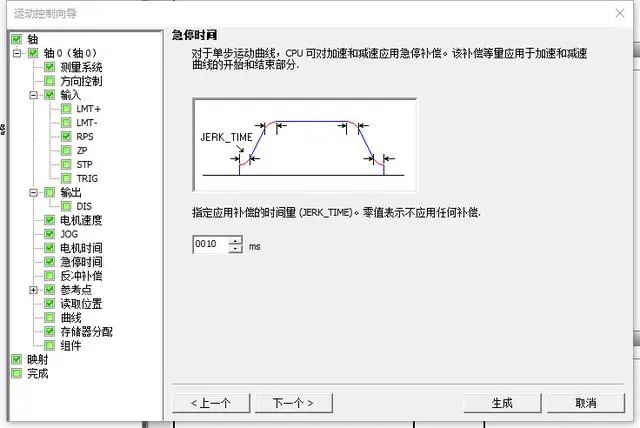
16ĪóĘ┤ø_čaāöŻ¼ę▓Š═╩ŪąŻ£╩ĮzĖ▄ķgŽČĪŻ
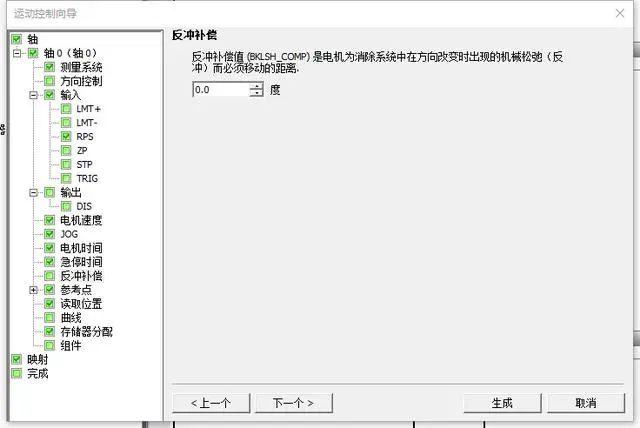
17Īóģó┐╝³cįOČ©
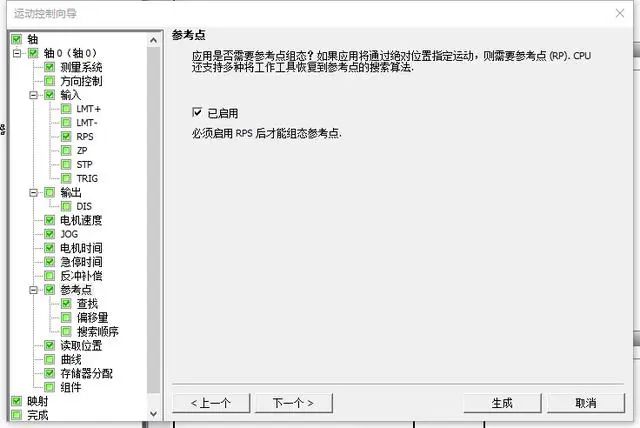
18Īóšę┴Ń³cĢr╦┘Č╚║═ĘĮŽ“įOČ©ĪŻ

19ĪóŲ½ęŲ┴┐įOČ©
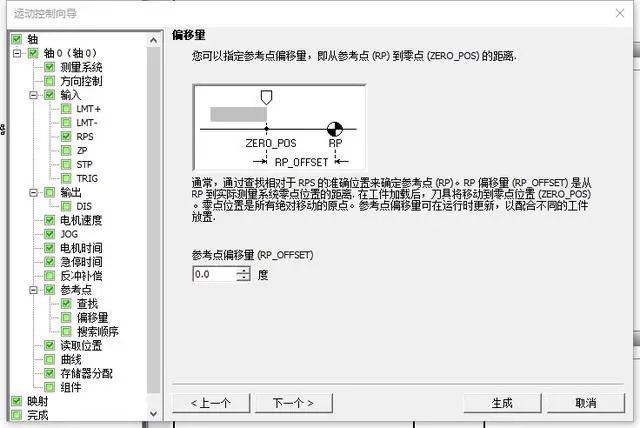
20Īó╦č╦„ģó┐╝³cĘĮ╩Į▀xō±
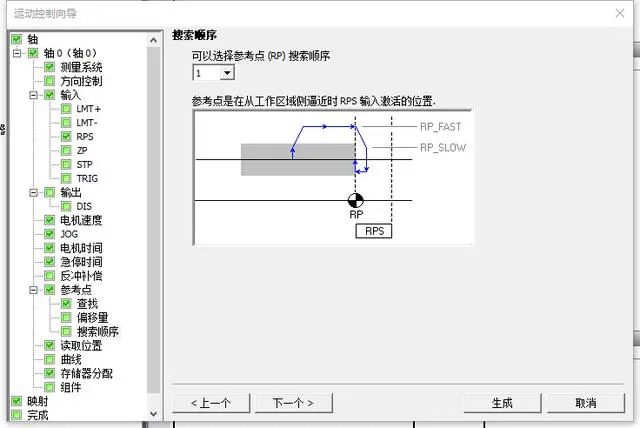
21ĪóÅ─“īäėŲ„ųąūx╚ĪĮ^ī”╬╗ų├
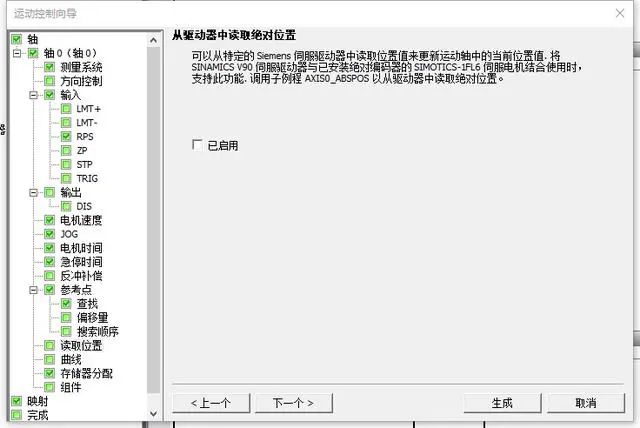
22ĪóŪ·ŠĆįOČ©Ż¼╬ę▀@└’ø]ė├Ū·ŠĆŻ¼ø]ėą╔·│╔Ū·ŠĆĪŻ
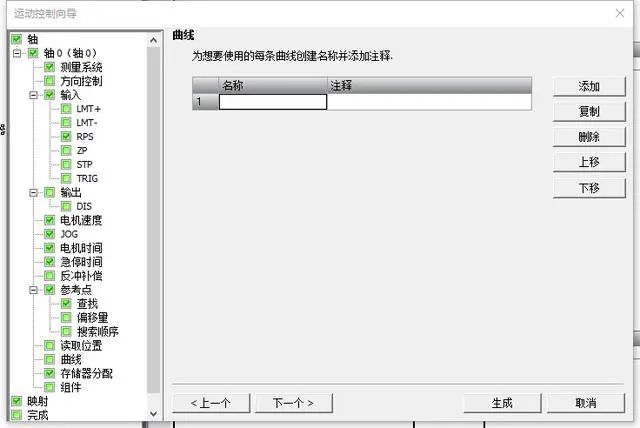
23Īó³c"Į©ūh"ūįäėĘų┼õĄžųĘĪŻ
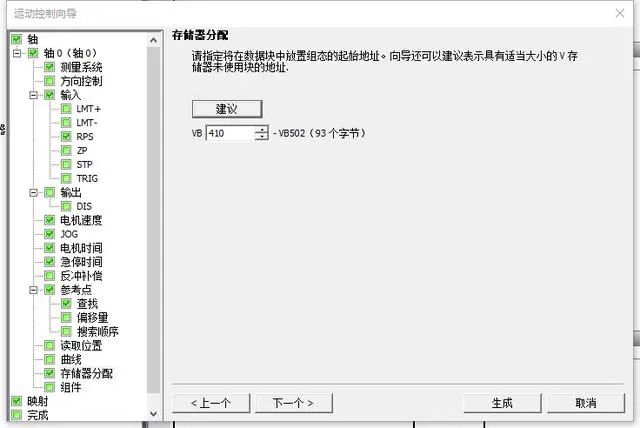
24ĪóĮM╝■
25Īóė│╔õ’@╩Š

26Īó═Ļ│╔Ż¼³cō¶╔·│╔Š══Ļ│╔┴╦ĪŻ
1Ż«åóė├▓ó│§╩╝╗»▌SAXISx_CTRLūė│╠ą“Ż©┐žųŲŻ®åóė├║═│§╩╝╗»▀\äė▌SŻ¼ĘĮĘ©╩Ūūįäė├³┴Ņ▀\äė▌S├┐CPUĖ³Ė─×ķRUN─Ż╩ĮĢr╝ė▌dĮMæB/Ū·ŠĆ▒ĒĪŻį┌ĒŚ─┐ųąų╗ī”├┐Śl▀\äė▌S╩╣ė├┤╦ūė│╠ą“ę╗┤╬Ż¼▓ó┤_▒Ż│╠ą“Ģ■į┌├┐┤╬Æ▀├ĶĢrš{ė├┤╦ūė│╠ą“ĪŻ╩╣ė├SM0.0Ż©╩╝ĮKķ_åóŻ®ū„×ķENģóöĄĄ─▌ö╚ļĪŻ
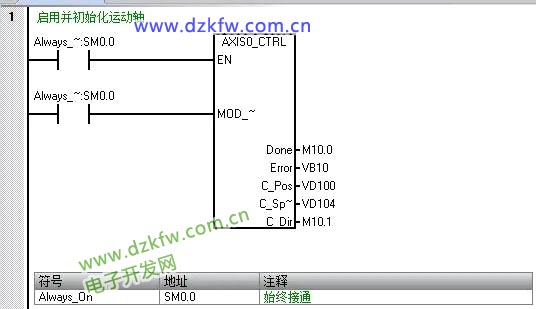
╣▄─_║¼┴xŻ║MODEŻ║åóė├─ŻēKĪŻ1=┐╔░l╦═├³┴ŅŻ╗0=ųąų╣▀MąąųąĄ─╚╬║╬├³┴ŅDoneŻ║═Ļ│╔ś╦ųŠ╬╗ErrorŻ║Õeš`┤·┤aŻ©ūų╣ØŻ®C_PosŻ║▌SĄ─«öŪ░╬╗ų├Ż©Į^ī”Č©╬╗╗“š▀ŽÓī”Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Realą═öĄō■Ż╗ŽÓī”├}ø_Ż║DINTą═öĄō■C_SpeedŻ║▌SĄ─«öŪ░╦┘Č╚Ż¼Realą═öĄō■C_DirŻ║▌SĄ─«öŪ░ĘĮŽ“Ż©1=Ę┤Ž“Ż¼0=š²Ž“Ż®2.╩ųäė┐žųŲ▌SAXISx_MANūė└²│╠Ż©╩ųäė─Ż╩ĮŻ®īó▀\äė▌Sų├×ķ╩ųäė─Ż╩ĮĪŻ▀@į╩įSļŖÖC░┤▓╗═¼Ą─╦┘Č╚▀\ąąŻ¼╗“čžš²Ž“╗“žōŽ“┬²▀MĪŻį┌═¼ę╗ĢrķgāH─▄åóė├RUNĪóJOG_P╗“JOG_N▌ö╚ļų«ę╗ĪŻ
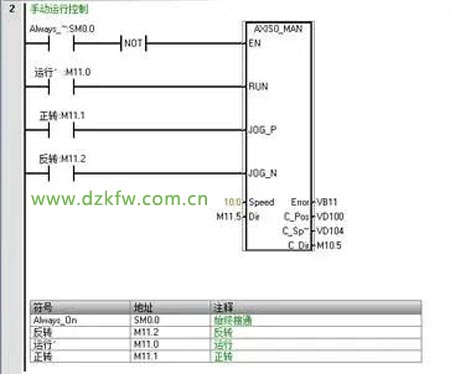
╣▄─_║¼┴xŻ║RUNŻ║1=▌S╩ųäė▀\ąąŻ©╦┘Č╚║═ĘĮŽ“Ęųäeė╔Speed║═Dir╣▄─_┐žųŲŻ®0=═Żų╣╩ųäė┐žųŲJOG_PŻ║1=š²▐D³cäė┐žųŲJOG_NŻ║1=Ę┤▐D³cäė┐žųŲSpeedŻ║RUN▀\ąąĢrĄ──┐ś╦╦┘Č╚Ż¼Realą═öĄō■DirŻ║RUN▀\ąąĢrĄ─ĘĮŽ“ErrorŻ║Õeš`┤·┤aŻ©ūų╣ØŻ®C_PosŻ║▌S«öŪ░╬╗ų├Ż©Į^ī”Č©╬╗╗“š▀ŽÓī”Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Realą═öĄō■Ż╗ŽÓī”├}ø_Ż║DINTą═öĄō■C_SpeedŻ║▌S«öŪ░╦┘Č╚Ż¼Realą═öĄō■C_DirŻ║▌SĄ─«öŪ░ĘĮŽ“Ż©1=Ę┤Ž“Ż¼0=š²Ž“Ż®3Īó▓ķšęģó┐╝³cū▀Į^ī”╬╗ų├║═ŽÓī”╬╗ų├Ū░ąĶ꬚ęĄĮšµīŹĄ─┴Ń³cŻ¼Į^ī”╬╗ų├║═ŽÓī”╬╗ų├▓┼─▄Ė∙ō■┴Ń³c▀\ąąĪŻAXISx_RSEEKūė│╠ą“Ż©╦č╦„ģó┐╝³c╬╗ų├Ż®╩╣ė├ĮMæB/Ū·ŠĆ▒ĒųąĄ─╦č╦„ĘĮĘ©åóäėģó┐╝³c╦č╦„▓┘ū„ĪŻ▀\äė▌SšęĄĮģó┐╝³cŪę▀\äė═Żų╣║¾Ż¼▀\äė▌SīóRP_OFFSETģóöĄųĄ▌d╚ļ«öŪ░╬╗ų├ĪŻ
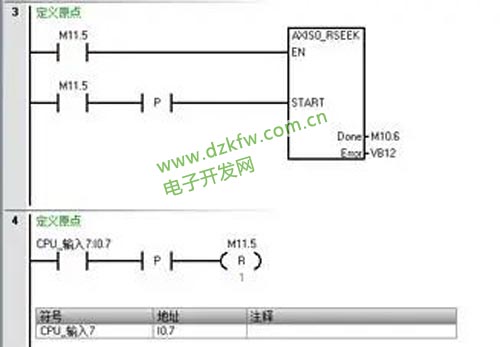
╣▄─_║¼┴xŻ║STARTŻ║├┐Įė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼Š═ł╠ąąę╗┤╬▓ķšęģó┐╝³cŻ©ģó┐╝³c▓ķšęĘĮ╩Įė╔▌SĮMæB┤_Č©Ż®DoneŻ║═Ļ│╔ś╦ųŠ╬╗ErrorŻ║Õeš`┤·┤aŻ©ūų╣ØŻ®4.Į^ī”╗“š▀ŽÓī”Č©╬╗AXISx_GOTOūė│╠ą“├³┴Ņ▀\äė▌S▐DĄĮ╦∙ąĶ╬╗ų├ĪŻ
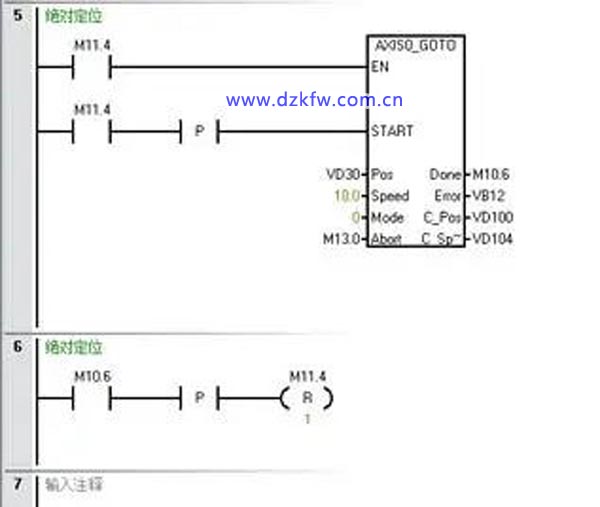
╣▄─_║¼┴xŻ║STARTŻ║├┐Įė═©ę╗éĆÆ▀├Ķų▄Ų┌Ż¼Š═ł╠ąąę╗┤╬Č©╬╗PosŻ║─┐ś╦╬╗ų├Ż©Į^ī”Č©╬╗×ķū°ś╦³cŻ¼ŽÓī”Č©╬╗×ķā╔³cķgŠÓļxŻ®Ż¼╣ż│╠å╬╬╗Ż║Realą═öĄō■Ż╗ŽÓī”├}ø_Ż║DINTą═öĄō■SpeedŻ║─┐ś╦╦┘Č╚Ż¼Realą═öĄō■MODEŻ║ęŲäė─Ż╩Į0Ż║Į^ī”╬╗ų├ 1Ż║ŽÓī”╬╗ų├ 2Ż║å╬╦┘▀B└m š²Ž“ą²▐D 3Ż║å╬╦┘▀B└mĘ┤Ž“ą²▐DAbortŻ║═Żų╣š²į┌ł╠ąąĄ─▀\äėDoneŻ║═Ļ│╔ś╦ųŠ╬╗ErrorŻ║Õeš`┤·┤aŻ©ūų╣ØŻ®C_PosŻ║▌S«öŪ░╬╗ų├Ż©Į^ī”Č©╬╗╗“š▀ŽÓī”Č©╬╗Ż®Ż¼╣ż│╠å╬╬╗Ż║Realą═öĄō■Ż╗ŽÓī”├}ø_Ż║DINTą═öĄō■C_SpeedŻ║▌S«öŪ░╦┘Č╚Ż¼Realą═öĄō■

 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū